一种基于完整weis
‑
fogh结构的全航速减摇鳍及其操纵方法
技术领域
1.本发明涉及鳍结构并实现船舶的全航速高效减摇技术领域,具体为一种基于完整weis
‑
fogh结构的全航速减摇鳍及其操纵方法。
背景技术:
2.恶劣的海洋环境会造成船舶的摇晃运动,因此对稳定性要求高的船舶通常会配置减摇鳍或减摇水舱等减摇设备。但传统减摇鳍依靠流经鳍表面的流速产生升力,在零低航速下减摇能力有限甚至不能减摇。而减摇水舱的减摇效果也往往不能令人满意。为此,科技工作者发明了零航速减摇鳍,将减摇鳍的应用范围扩展到全部航速。
3.在中高航速下应用来流速度和攻角产生升力,而在零低航速下采用快速拍动的方式,依靠阻力原理产生稳定力。然而受鳍面积和机械鳍角的限制,基于纵向拍动型的减摇鳍在零低航速下提供的稳定力有限。对于科学考察船、工程作业船等经常需要在零低航速下工作的船舶,现有的零航速减摇鳍往往不能满足这些船舶高海况下的作业要求。
4.生物学家weis
‑
fogh通过对黄蜂飞行的观察,提出了weis
‑
fogh结构。之后的理论研究和风洞实验表明这种结构的升力系数高达7至8,而且非常适合于在小雷诺数,即零低航速下应用。鉴于weis
‑
fogh结构高效的升力特性,国内外不少学者将其应用于仿生昆虫、扑翼飞行器和船舶推进。然而由于实现weis
‑
fogh结构的复杂性,所以目前应用的大多是简化的weis
‑
fogh结构,省略了前缘分离而直接采用拍动。哈尔滨工程大学船舶减摇与控制技术研究所首次将weis
‑
fogh结构应用于船舶的减摇,金鸿章教授在《基于weis
‑
fogh机构的零航速减摇鳍升力特性研究》建立了基于weis
‑
fogh结构的零航速减摇鳍的升力模型。綦志刚博士在其博士论文《船舶零航速减摇鳍升力机理及系统模型研究》对weis
‑
fogh结构的升力模型和基于该结构的减摇鳍进行了研究。王宇博士在其博士论文《船舶零航速仿生减摇鳍控制机理研究》对基于weis
‑
fogh结构的减摇鳍进行了改进。
5.然而之前设计的基于weis
‑
fogh结构的减摇鳍,每一个鳍采用两个翼面,利用两个翼面的张开产生环量增加升力。这种设计结构复杂,在零低航速和中高航速之间不方便转转。同时这种工作方式也是一种简化的weis
‑
fogh结构,工作过程中省略了前缘分离,降低了相同面积下的升力。
技术实现要素:
6.本发明的目的是为了充分利用weis
‑
fogh结构在零低航速下的高升力特性的种基于完整weis
‑
fogh结构的全航速减摇鳍及其操纵方法。
7.本发明的目的是这样实现的:
8.一种基于完整weis
‑
fogh结构的全航速减摇鳍,包括船体,所述船体上安装有摇臂,摇臂与开闭油缸连接,摇臂上安装有十字轴体,十字轴体前端安装有鳍叶,十字轴体后段安装有马达。
9.进一步的,一种基于完整weis
‑
fogh结构的全航速减摇鳍操纵方法,包括以下步
骤:
10.步骤1:根据姿态传感器获得的船舶横摇信息,在零低航速下,在一个周期的开始时,鳍叶的梢弦竖直向上,鳍叶和船体上侧贴合在一起,夹角为0度。
11.步骤2:开闭油缸的活塞杆收回一段,使鳍叶首弦相对船体上侧迅速张开30度,此过程不超过横摇周期的1/10。
12.步骤3:液压马达带动鳍叶开始加速向下拍动,同时开闭油缸的活塞杆往外伸出,当鳍叶运动到与船体上侧夹角30度时,开闭油缸活塞杆完全伸出,此过程约1/10个横摇周期。
13.步骤4:液压马达带动鳍叶以最大投影面积和最大速度向下拍动,至鳍叶与船体下侧夹角20度。此过程约1/5个横摇周期。
14.步骤5:液压马达带动鳍叶以最大投影面积继续向下拍动,并进行减速,至鳍叶与船体下侧夹角0度,鳍停止运动。此过程约1/10个横摇周期。
15.步骤6:开闭油缸的活塞杆收回一段,使鳍叶首弦相对下侧船体迅速张开30度,此过程不超过横摇周期的1/10。
16.步骤7:液压马达带动鳍叶开始加速向上拍动,同时开闭油缸的活塞杆往外伸出,当鳍叶运动到与船体下侧夹角30度时,开闭油缸活塞杆完全伸出,此过程约1/10个横摇周期。
17.步骤8:液压马达带动鳍叶以最大投影面积和最大速度向上拍动动,至鳍叶与船体上侧夹角20度。此过程约1/5个横摇周期。
18.步骤9:液压马达带动鳍叶以最大投影面积继续向上拍动,并进行减速,至鳍叶与船体上侧夹角0度,鳍停止运动。此过程约1/10个横摇周期,如图4(a)所示。
19.步骤10:开始下一个周期的运动,重复步骤1
‑
9。
20.步骤11:在中高航速时,开闭油使鳍完全张开,并绕鳍轴旋转,如图4(h)所示,形成与常规减摇鳍一致的结构形式。
21.步骤12:在中高航速时,根据姿态传感器获得的船舶横摇信息,驱动器要一个角度,一个来流和有效攻角产生升力。
22.步骤13:当停止使用减摇鳍或靠码头时,鳍叶的梢弦竖直向上,鳍叶和船体上侧贴合在一起,缩进船体。航行时可以减小阻力,靠码头时可以避免碰撞。
23.与现有技术相比,本发明的有益效果是:
24.1、利用船体作为一个固定翼面,只需要一个翼面就可以形成weis
‑
fogh结构;
25.2、利用开闭油缸和液压马达实现了鳍叶的双自由度运动,实现了完整的weis
‑
fogh结构的运动,从而可以提供更大的升力;
26.3、在中高航速下,利用开闭油缸使鳍叶完全放出,保持了和常规减摇鳍的兼容性;
27.4、在船舶靠码时,可以使鳍叶保持竖直状态收进船体,不需要考虑避碰角,可以设计更大的面积和理想的展弦比。
附图说明
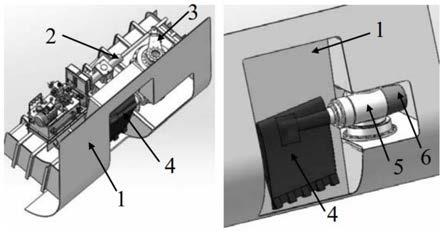
28.图1为目前应用的全航速减摇鳍图;
29.图2为weis
‑
fogh结构的典型特征图;
30.图3为基于weis
‑
fogh结构的全航速减摇鳍图;
31.图4为全航速减摇鳍的工作过程图。
具体实施方式
32.下面结合附图与具体实施方式对本发明作进一步详细描述。
33.步骤1:根据姿态传感器获得的船舶横摇信息,在零低航速下,在一个周期的开始时,鳍叶的梢弦竖直向上,鳍叶和船体上侧贴合在一起,夹角为0度,如图4中的(a)所示。
34.步骤2:开闭油缸的活塞杆收回一段,使鳍叶首弦相对船体上侧迅速张开30度,此过程不超过横摇周期的1/10,如图4中的(b)所示。
35.步骤3:液压马达带动鳍叶开始加速向下拍动,同时开闭油缸的活塞杆往外伸出,当鳍叶运动到与船体上侧夹角30度时,开闭油缸活塞杆完全伸出,此过程约1/10个横摇周期,如图4中的(c)所示。
36.步骤4:液压马达带动鳍叶以最大投影面积和最大速度向下拍动,至鳍叶与船体下侧夹角20度。此过程约1/5个横摇周期,如图4中的(d)所示。
37.步骤5:液压马达带动鳍叶以最大投影面积继续向下拍动,并进行减速,至鳍叶与船体下侧夹角0度,鳍停止运动。此过程约1/10个横摇周期,如图4(e)所示。
38.步骤6:开闭油缸的活塞杆收回一段,使鳍叶首弦相对下侧船体迅速张开30度,此过程不超过横摇周期的1/10,如图4中的(f)所示。
39.步骤7:液压马达带动鳍叶开始加速向上拍动,同时开闭油缸的活塞杆往外伸出,当鳍叶运动到与船体下侧夹角30度时,开闭油缸活塞杆完全伸出,此过程约1/10个横摇周期。
40.步骤8:液压马达带动鳍叶以最大投影面积和最大速度向上拍动动,至鳍叶与船体上侧夹角20度。此过程约1/5个横摇周期。
41.步骤9:液压马达带动鳍叶以最大投影面积继续向上拍动,并进行减速,至鳍叶与船体上侧夹角0度,鳍停止运动。此过程约1/10个横摇周期,如图4中的人(a)所示。
42.步骤10:开始下一个周期的运动,重复步骤1
‑
9。
43.步骤11:在中高航速时,开闭油使鳍完全张开,并绕鳍轴旋转,如图4中的(h)所示,形成与常规减摇鳍一致的结构形式。
44.步骤12:在中高航速时,根据姿态传感器获得的船舶横摇信息,驱动器要一个角度,一个来流和有效攻角产生升力。
45.步骤13:当停止使用减摇鳍或靠码头时,鳍叶的梢弦竖直向上,鳍叶和船体上侧贴合在一起,缩进船体。航行时可以减小阻力,靠码头时可以避免碰撞。