1.本实用新型涉及水上漂浮装置技术领域,特别涉及一种应用于网箱破网查漏的水上漂浮装置。
背景技术:
2.网箱养殖是目前市面上养殖水产品的一种普遍方式,网箱养殖属于集约化经营,能充分利用场地、水源、人力和物力,具有产量高,效益好,但技术性强的特点。目前用于养殖水产品的网箱,是将网箱置于水中,再将需要养殖的水产品幼苗投放在网箱中,定时的向网箱中投放食料,让网箱中的水产品慢慢长大;现有水产品养殖过程中,将网箱置于水里,不把网箱提出来,或是人员不下到水里去是无法知道网箱情况的,一般对于大型养殖,网箱体积也很大,通常将网箱置于水中是不轻易再从水中拿出来的,这样时间久了,若是网箱上的网孔破损了,人员也无法知道,这样就存在网箱中的水产品会从破损的网孔中逃走的问题,同时,时间久了,水中的藻类或是微生物类会附着在网箱上,长此下去,藻类或是微生物将会将网孔堵住,网孔被堵住,网箱内外的水流将无法继续对流,这样容易造成网箱内缺氧的情况发生,不利于网箱内水产品的健康成长。
3.对于上述问题,公开号为“cn2677970”的专利文献,公开了一种水下围网查漏仪,该专利文献应用于水产围网养殖业,对水下围网破损进行检查,尤其是在水浑浊情况下,对大面积围网查漏适用;该专利文献由水下摄像头和自动调整装置组成,前者具有一个很大的防水外壳,外壳正面镶着的防水透明玻璃,摄像机机芯及照明设备装在其内部,透过正面玻璃拍摄;工作时自动调整装置自动调整摄像头在水下位置,使玻璃面紧贴水下围网,因此拍摄受水质影响很小;自动调整装置由固定夹具、活动套管、转轴、定位螺丝、连杆、“u”型支架和凸轴组成;其工作原理是,利用摄像头在水下所受浮力,使摄像头围绕自动调整装置的两个电机而转动,最终摄像头正面玻璃紧贴水下围网而达到平衡。该专利文献是采用将自动调整装置固定在水面以外,将摄像头置于水下对围网进行检测的,这种查漏仪用于小型的围网查漏还是可行的,对于大型网箱,尤其是对于在深海中使用的网箱查漏将不太适用,因为需要比较大的外部平台来对自动调整装置进行固定,这样外部平台的建立就会增大成本。
4.因此,现有用于水中网箱的检测设备,存在适用范围有限和无法对深水域中的网箱进行使用的问题。
技术实现要素:
5.本实用新型为了解决现有用于水中网箱的检测设备所存在的上述技术问题,提供了一种应用于网箱破网查漏的水上漂浮装置,它具有适用范围较广和能够让查漏装置对深水域中的网箱进行检测使用的特点。
6.本实用新型的技术方案:一种应用于网箱破网查漏的水上漂浮装置,包括漂浮板,所述漂浮板背离水面的一侧密封设有隔水框,所述隔水框为密封结构,所述漂浮板上位于
隔水框的内部设有安装框,所述安装框内可拆卸设有至少一块主电池,所述安装框内设有控制板,所述控制板与主电池电连接。本实用新型通过设置漂浮板来使得整个装置能够良好的漂浮在水面上,漂浮板的表面积和厚度大小以能良好的让整个装置漂浮在水面上为准;本实用新型通过设置隔水框来保证主电池和控制板等电器件安装的安全性,隔水框内的中空结构也能够补充漂浮板的浮力,从而可以适当的减小漂浮板的体积;其中主电池为整个装置的正常工作提供电力;控制板内部集成有控制程序,当启动开关之后,整个装置就安装设定程序开始对网箱上的网孔情况进行检测了;本实用新型的使用将无需再建立外部平台,水下查漏设备将通过漂浮板漂浮在水面上,借助于水的浮力对整个查漏设备进行限定,充其量使用连接绳将漂浮板连接在网箱上进行更好的限定就可以了,使得整个查漏设备既可以适用于潜水区的网箱,也可以适用于深水区的网箱,适用范围很广阔。
7.作为优选,所述主电池通过限定块限定在安装框的内部。主电池可以有一块、两块或更多块,具体数量可以根据实际情况灵活设定,限定块能够保证主电池安装的稳定性,使得主电池能够稳定的安装在安装框内,通过限定块的锁定或是解锁,可以实现主电池的安装和取下。
8.作为优选,所述安装框内设有第二安装架,所述控制板设置在第二安装架上。第二安装架为控制板提供安装位置,使得控制板能够稳定的位于安装框内。
9.作为优选,所述安装框内可拆卸设有至少一块备用电池,所述备用电池与控制板电连接。备用电池作为主电池的后备使用,当主电池电量不足时,自动切换到备用电池供电,保证整个装置的不间断工作,直到整个装置完成完整的网箱检测工作;备用电池可以有一块、两块或更多块,具体数量可以根据实际情况灵活设定。
10.作为优选,所述备用电池通过压条设置在安装框的内部。压条能够保证备用电池安装的稳定性,使得备用电池能够稳定的安装在安装框内,通过压条的锁定或是解锁,可以实现备用电池的安装和取下。
11.作为优选,所述安装框内设有第一安装架,所述备用电池通过压条设置在第一安装架上。第一安装架为备用电池提供安装位置,使得备用电池能够稳定的位于安装框内。
12.作为优选,所述隔水框与安装框之间的空间内填充有泡沫塑料。泡沫塑料是的漂浮板具有更好的漂浮效果。
13.作为优选,所述漂浮板上设有多个连接孔,所述连接孔通过连接绳与外部的固定墙或固定柱连接。通过连接绳连接在连接孔内,并与外部的固定墙或固定柱连接,使得水上漂浮装置在水面上的稳定性更好,能够保证水上漂浮装置在水面上处于稳定的位置,不过多的随水面的波动发生晃动,保证对网箱的检测稳定性。
14.本实用新型具有如下有益效果:
15.(1)通过设置漂浮板来使得整个装置能够良好的漂浮在水面上,漂浮板的表面积和厚度大小以能良好的让整个装置漂浮在水面上为准;
16.(2)通过设置隔水框来保证主电池和控制板等电器件安装的安全性,隔水框内的中空结构也能够补充漂浮板的浮力,从而可以适当的减小漂浮板的体积;其中主电池为整个装置的正常工作提供电力;控制板内部集成有控制程序,当启动开关之后,整个装置就安装设定程序开始对网箱上的网孔情况进行检测了;
17.(3)本实用新型的使用将无需再建立外部平台,水下查漏设备将通过漂浮板漂浮
在水面上,借助于水的浮力对整个查漏设备进行限定,充其量使用连接绳将漂浮板连接在网箱上进行更好的限定就可以了,使得整个查漏设备既可以适用于潜水区的网箱,也可以适用于深水区的网箱,适用范围很广阔。
附图说明
18.图1是本实用新型位于网箱中时的结构示意图;
19.图2是本实用新型的结构立体图;
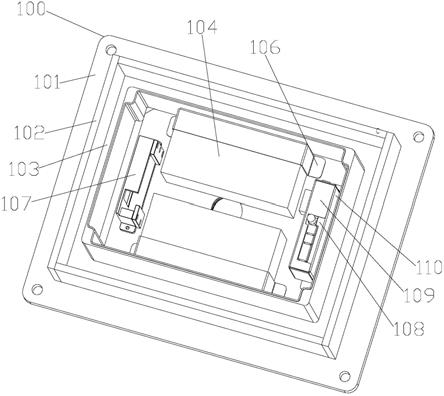
20.图3是本实用新型中水上漂浮装置的立体结构图;
21.图4是本实用新型中水上漂浮装置的截面图;
22.图5是本实用新型中连接段的结构示意图;
23.图6是本实用新型中走线通道处的结构示意图;
24.图7是本实用新型中第一驱动装置的结构示意图;
25.图8是本实用新型中第一驱动装置的截面图;
26.图9是本实用新型中第二驱动装置的结构示意图;
27.图10是本实用新型中第二驱动装置的截面图;
28.图11是本实用新型中第三驱动装置的结构示意图;
29.图12是本实用新型中第三驱动装置的截面图;
30.图13是本实用新型中摄像装置和照明装置相连接时的结构示意图;
31.图14是本实用新型中摄像装置的结构示意图;
32.图15是本实用新型中摄像装置的截面图;
33.图16是本实用新型中摄像装置的结构爆炸图;
34.图17是本实用新型中照明装置的结构示意图;
35.图18是本实用新型中照明装置的结构爆炸图;
36.图19是本实用新型中法兰盘组件处的结构示意图;
37.图20是本实用新型中法兰盘组件处的结构爆炸图;
38.图21是本实用新型抱箍组件中未安装抱箍时的结构示意图;
39.图22是本实用新型中抱箍组件的第一结构爆炸图;
40.图23是本实用新型中抱箍组件的第二结构爆炸图;
41.图24是本发明中控制板处的控制电路图;
42.图25是本发明中控制板对各连接臂的控制电路图;
43.图26是本发明中控制板对摄像装置的控制电路图;
44.图27是本发明中控制板对照明装置的控制电路图。
45.附图中的标记为:100
‑
水上漂浮装置,101
‑
漂浮板,102
‑
隔水框,103
‑
安装框,104
‑
主电池,105
‑
控制板,106
‑
限定块,107
‑
第二安装架,108
‑
备用电池,109
‑
压条,110
‑
第一安装架,200
‑
第一驱动装置,201
‑
第一固定套筒,202
‑
第一电机,203
‑
第一转动套筒,204
‑
第一固定座,205
‑
第二固定座,300
‑
第一连接臂,301
‑
连接段,302
‑
走线通道,400
‑
第二驱动装置,401
‑
第二固定套筒,402
‑
第二电机,403
‑
第二转动套筒,404
‑
第三固定座,405
‑
第四固定座,500
‑
第二连接臂,600
‑
竖直摆动组件,601
‑
第三驱动装置,6011
‑
第三固定套筒,6012
‑
第三电机,6013
‑
第三转动套筒,6014
‑
第五固定座,6015
‑
第六固定座,602
‑
第四连接臂,700
‑
摄像装置,701
‑
密封盖,702
‑
第一安装筒,703
‑
摄像机,704
‑
透视镜,705
‑
刮水组件,7051
‑
第三安装架,7052
‑
限位开关,7053
‑
第四电机,7054
‑
输出轴,7055
‑
拨动块,7056
‑
安装板,7057
‑
刮水板,7058
‑
第三安装块,706
‑
连接管,707
‑
第一支撑柱,708
‑
固定板,710
‑
第二支撑柱,711
‑
挡环,713
‑
压环,800
‑
照明装置,801
‑
第二安装筒,802
‑
第一承载板,803
‑
驱动板,804
‑
散热板,805
‑
第二承载板,806
‑
照明灯珠,807
‑
透光镜,808
‑
第三支撑柱,809
‑
压盘,810
‑
支撑段,900
‑
安全连接件,1000
‑
第三连接臂,1100
‑
法兰盘组件,1101
‑
第一法兰盘,1102
‑
第二法兰盘,1103
‑
碗形塞座,1104
‑
碗形塞孔,1106
‑
压盖,1200
‑
抱箍组件,1201
‑
第一抱箍,1202
‑
第二抱箍,1203
‑
第一螺孔,1204
‑
第二螺孔,1205
‑
第三螺孔,1206
‑
第四螺孔,1207
‑
第一连接法兰,1208
‑
第二连接法兰,1500
‑
网箱。
具体实施方式
46.下面结合附图和实施例对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。
47.如图3和图4所示的一种应用于网箱破网查漏的水上漂浮装置,包括漂浮板101,漂浮板背离水面的一侧密封设有隔水框102,隔水框为密封结构,漂浮板上位于隔水框的内部设有安装框103,安装框内可拆卸设有至少一块主电池104,安装框内设有控制板105,控制板与主电池电连接。主电池通过限定块106限定在安装框的内部。安装框内设有第二安装架107,控制板设置在第二安装架上。安装框内可拆卸设有至少一块备用电池108,备用电池与控制板电连接。备用电池通过压条109设置在安装框的内部。安装框内设有第一安装架110,备用电池通过压条设置在第一安装架上。隔水框与安装框之间的空间内填充有泡沫塑料。漂浮板上设有多个连接孔,连接孔通过连接绳与外部的固定墙或固定柱连接。
48.如图1和图2所示的一种网箱破网查漏装置,包括水上漂浮装置100,水上漂浮装置靠近于水面的一侧密封设有第一驱动装置200,第一驱动装置的驱动端在水平方向转动,第一驱动装置在使用时位于水面以下,第一驱动装置的驱动端通过第一连接臂300密封连接有至少一个第二驱动装置400,第二驱动装置的驱动端在竖直方向转动,第二驱动装置的驱动端密封连接有第二连接臂500,第二连接臂远离第二驱动装置的一端通过至少一个竖直摆动组件600密封连接有摄像装置700,竖直摆动组件上靠近于摄像装置的位置或摄像装置上设有至少一个照明装置800。本实用新型通过设置水上漂浮装置,在水上漂浮装置在水面上的漂浮作用力下,整个装置位于水中的网箱内,对网箱上的网孔情况进行实时检测,摄像装置发现网孔有磨损,会向外界发出警报,让工作人员知道网孔的破损情况,从而及时对网孔进行修复或对网箱进行更换,防止网箱内的鱼虾蟹等水产品从破网孔处逃走,防止产生损失;同时摄像装置也能够及时发现网箱上的网孔是否被水中的微生物或藻类等物质堵掉,摄像装置一旦发现网孔有被堵塞的情况,也会马上向外界发出警报,让工作人员知道网孔被堵塞的情况,从而及时对网孔清理疏通,防止因网孔堵塞,网箱内外的水不对流,造成网箱内缺氧的情况发生;本实用新型通过设置第一驱动装置,第一驱动装置的驱动端能够在水平方向转动,使得摄像装置能够沿着同一环形轨迹运动,从而能够全面的拍摄到网箱在同一层面上的网孔情况;本实用新型通过设置第二驱动装置和竖直摆动组件,第二驱动装置的驱动端在竖直方向转动,第二驱动装置和竖直摆动组件协同能够使得摄像装置处于网箱内竖向的任意位置,第二驱动装置和竖直摆动组件协同使得摄像装置相对于网孔处于
合适的距离,从而使得摄像装置能对网孔的情况进行清晰拍摄;本实用新型通过设置至少一个照明装置来为摄像装置的摄像作业提供亮度支撑,保证拍摄的清晰度;其中为了保证水上漂浮装置在水面上处于稳定的位置,不过多的随水面的波动发生晃动,保证整个装置的检测稳定性,在水上漂浮装置上设置多个连接孔,通过连接绳连接在连接孔内,并与外部的固定墙或固定柱连接,使得水上漂浮装置在水面上的稳定性更好;本实用新型位于水面以下的部分全设计为全密封结构,来保证设备在水中的长期稳定工作,其中的全密封包括焊接密封和使用密封圈进行的密封;本实用新型在第一连接臂上的第二驱动装置可以为一个或多个,置于具体数量可以根据实际情况灵活设置,每一个第二驱动装置将对应一个摄像装置,也就是说本实用新型中的摄像检测单元可以有多个,具有更好的灵活性,能够根据实际情况保证很好的网箱检测效果。
49.第二驱动装置通过安全连接件900与第一驱动装置连接。安全连接件能够保证第二驱动装置工作的安全性和稳定性,由于第二驱动装置有一个或多个,并且第二驱动装置都是设置在第一连接臂上的,当第一连接臂长度过长时,位于第一连接臂上的第二驱动装置,尤其是位于第一连接臂端部的第二驱动装置将可能将第一连接臂折弯或折断,这样第二驱动装置及其与第二驱动装置相连接的其他部件将因失去支撑而不能工作,通过安全连接件将第二驱动装置连接在第一驱动装置上,当第一连接臂受力过多时,安全连接件能够为第一连接臂分担一部分作用力,防止第一连接臂折弯或折断,保证第二驱动装置及其与第二驱动装置相连接的其他部件工作的稳定性。
50.安全连接件为刚性连接杆和/或柔性连接绳。置于选用刚性连接杆还是柔性连接绳,可以根据实际情况灵活选用。
51.如图3和图4所示的水上漂浮装置包括漂浮板101,漂浮板背离水面的一侧密封设有隔水框102,隔水框为密封结构,漂浮板上位于隔水框的内部设有安装框103,安装框内可拆卸设有至少一块主电池104,安装框内设有控制板105,控制板与主电池电连接;漂浮板与第一驱动装置密封连接。本实用新型通过设置漂浮板来使得整个装置能够良好的漂浮在水面上,漂浮板的表面积和厚度大小以能良好的让整个装置漂浮在水面上为准;本实用新型通过设置隔水框来保证主电池和控制板等电器件安装的安全性,隔水框内的中空结构也能够补充漂浮板的浮力,从而可以适当的减小漂浮板的体积;其中主电池为整个装置的正常工作提供电力;控制板内部集成有控制程序,当启动开关之后,整个装置就安装设定程序开始对网箱上的网孔情况进行检测了。
52.主电池通过限定块106限定在安装框的内部。主电池可以有一块、两块或更多块,具体数量可以根据实际情况灵活设定,限定块能够保证主电池安装的稳定性,使得主电池能够稳定的安装在安装框内,通过限定块的锁定或是解锁,可以实现主电池的安装和取下。
53.安装框内设有第二安装架107,控制板设置在第二安装架上。第二安装架为控制板提供安装位置,使得控制板能够稳定的位于安装框内。
54.安装框内可拆卸设有至少一块备用电池108,备用电池与控制板电连接。备用电池作为主电池的后备使用,当主电池电量不足时,自动切换到备用电池供电,保证整个装置的不间断工作,直到整个装置完成完整的网箱检测工作;备用电池可以有一块、两块或更多块,具体数量可以根据实际情况灵活设定。
55.备用电池通过压条109设置在安装框的内部。压条能够保证备用电池安装的稳定
性,使得备用电池能够稳定的安装在安装框内,通过压条的锁定或是解锁,可以实现备用电池的安装和取下。
56.安装框内设有第一安装架110,备用电池通过压条设置在第一安装架上。第一安装架为备用电池提供安装位置,使得备用电池能够稳定的位于安装框内。
57.水上漂浮装置靠近于水面的一侧密封设有第三连接臂1000,第一驱动装置密封设置在第三连接臂远离水上漂浮装置的一端。第三连接臂能够使得装置的主体部分位于深水区的网箱中,能够对深水区的网箱网孔情况进行准确检测。
58.漂浮板与第三连接臂远离水上漂浮装置的一端密封连接。此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
59.第二驱动装置通过安全连接件900与第三连接臂连接。安全连接件能够保证第二驱动装置工作的安全性和稳定性,由于第二驱动装置有一个或多个,并且第二驱动装置都是设置在第一连接臂上的,当第一连接臂长度过长时,位于第一连接臂上的第二驱动装置,尤其是位于第一连接臂端部的第二驱动装置将可能将第一连接臂折弯或折断,这样第二驱动装置及其与第二驱动装置相连接的其他部件将因失去支撑而不能工作,通过安全连接件将第二驱动装置连接在第三连接臂上,当第一连接臂受力过多时,安全连接件能够为第一连接臂分担一部分作用力,防止第一连接臂折弯或折断,保证第二驱动装置及其与第二驱动装置相连接的其他部件工作的稳定性。
60.如图7和图8所示的第一驱动装置包括第一固定套筒201,第一固定套筒与水上漂浮装置靠近于水面的一侧密封连接,第一固定套筒的内部设有第一电机202,第一固定套筒上密封转动设有第一转动套筒203,第一转动套筒与第一电机的驱动端连接,第一电机分别于主电池、备用电池和控制板电连接。第一固定套筒用于第一驱动装置在第三连接臂或水上漂浮装置上的稳定密封安装;第一电机为摄像装置和照明装置在水平方向上的移动提供水平转动力;第一旋转套筒用于对第一电机的水平转动力进行传导,也为第一连接臂提供稳定的安装位置;第一驱动装置整体具有很重的重量,第一驱动装置通过第三连接臂与水上漂浮装置连接后充当重锤的作用,当漂浮板因为水面的晃动而发生摆动时,在第一驱动装置自身重力的作用下,第一驱动装置能够使得漂浮板尽快恢复平稳。
61.第一固定套筒与第三连接臂远离水上漂浮装置的一端密封连接。此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
62.第一固定套筒的内部设有第一固定座204,第一电机设置在第一固定座上。第一固定座在第一固定套筒的内部为第一电机提供安装位置,保证第一电机安装和工作的稳定性。
63.第一电机的驱动端设有第二固定座205,第一转动套筒设置在第二固定座上。第二固定座一方面为第一转动套筒提供稳定的安装位置,另一方面将第一电机的驱动力顺利的传递给第一转动套筒;其中第一转动套筒和第一固定套筒之间为转动密封连接,在第一转动套筒转动的时候,依然能够保证与第一固定套筒之间的密封性,从而保证第一电机工作的电气安全性。
64.第一转动套筒与第一连接臂的一端密封连接。此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
65.如图9和图10所示的第二驱动装置包括第二固定套筒401,第二固定套筒与第一连
接臂远离第一驱动装置的一端密封连接,第二固定套筒的内部设有第二电机402,第二固定套筒上密封转动设有第二转动套筒403,第二转动套筒与第二电机的驱动端连接,第二电机分别于主电池、备用电池和控制板电连接。第二固定套筒用于第二驱动装置在第一连接臂上的稳定安装;第二电机为摄像装置和照明装置在竖直方向转动提供作用力;第二旋转套筒用于对第二电机的竖向转动力进行稳定传导。
66.第二固定套筒的内部设有第三固定座404,第二电机设置在第三固定座上。第三固定座在第二固定套筒的内部为第二电机提供安装位置,保证第二电机安装和工作的稳定性。
67.第二电机的驱动端设有第四固定座405,第二转动套筒设置在第四固定座上。第四固定座一方面为第二转动套筒提供稳定的安装位置,另一方面将第二电机的驱动力顺利的传递给第二转动套筒;其中第二转动套筒和第二固定套筒之间为转动密封连接,在第二转动套筒转动的时候,依然能够保证与第二固定套筒之间的密封性,从而保证第二电机工作的电气安全性。
68.第二转动套筒与竖直摆动组件密封连接。此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
69.竖直摆动组件包括第三驱动装置601和第四连接臂602,第三驱动装置的固定端与第二连接臂远离第二驱动装置的一端密封连接,第三驱动装置的驱动端在竖直方向转动,第四连接臂的一端与第三驱动装置的驱动端连接,第四连接臂的另一端与摄像装置密封连接。第三驱动装置和第四连接臂组成的竖直摆动组件为摄像装置和照明装置进一步提供在竖直方向上的转动,竖直摆动组件和第二驱动装置一起能够为摄像装置提供精确移动,能够实现摄像装置与网箱壁面之间的距离保持不变情况下的移动,从而能够保证摄像装置拍摄网箱壁面的清晰度,进而保证摄像装置对网孔检测的准确性;此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
70.多个竖直摆动组件依次密封连接。竖直摆动组件可以为一个也可以为多个,当竖直摆动组件为多个时,连接方式为第三驱动装置
‑
第四连接臂
‑
第三驱动装置
‑
第四连接臂...的依次连接,竖直摆动组件的个数可以根据实际网箱大小和位于水中的深度灵活设置,其标准以能够实现摄像装置与网箱壁面之间的距离保持不变情况下移动为准;此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
71.如图11和图12所示的第三驱动装置包括第三固定套筒6011,第三固定套筒与第二连接臂远离第二驱动装置的一端密封连接,第三固定套筒的内部设有第三电机6012,第三固定套筒上密封转动设有第三转动套筒6013,第三转动套筒与第三电机的驱动端连接,第三转动套筒与第四连接臂的一端密封连接;第三电机分别于主电池、备用电池和控制板电连接。第三固定套筒用于第三驱动装置在第二连接臂上的稳定安装;第三电机为摄像装置和照明装置在竖直方向转动提供作用力;第三旋转套筒用于对第三电机的竖向转动力进行稳定传导;第三驱动装置和第二驱动装置一起能够为摄像装置提供精确移动,能够实现摄像装置与网箱壁面之间的距离保持不变情况下的移动,从而能够保证摄像装置拍摄网箱壁面的清晰度,进而保证摄像装置对网孔检测的准确性;此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
72.第三固定套筒的内部设有第五固定座6014,第三电机设置在第五固定座上。第五
固定座在第三固定套筒的内部为第三电机提供安装位置,保证第三电机安装和工作的稳定性。
73.第三电机的驱动端设有第六固定座6015,第三转动套筒设置在第六固定座上。第六固定座一方面为第三转动套筒提供稳定的安装位置,另一方面将第三电机的驱动力顺利的传递给第三转动套筒;其中第三转动套筒和第三固定套筒之间为转动密封连接,在第三转动套筒转动的时候,依然能够保证与第三固定套筒之间的密封性,从而保证第三电机工作的电气安全性。
74.如图14、图15和图16所示的摄像装置包括密封盖701,密封盖与第四连接臂远离第三驱动装置的一端密封连接,密封盖上密封设有第一安装筒702,第一安装筒内设有摄像机703,第一安装筒上远离密封盖的一端设有透视镜704,透视镜与摄像机的摄像头相对;第一安装筒上设有刮水组件705,刮水组件与透视镜相对应;摄像机和刮水组件均与主电池、备用电池和控制板电连接。密封盖既能够能够保证与第四连接臂连接时的密封性能,又能够保证与第一安装筒安装后的密封性能;第一安装筒作为摄像装置的主壳体使用;摄像机用于拍摄图像,通过图像视觉的方式,通过图像识别准确检测网箱上网孔的情况;通过设置刮水组件来保证透视镜处的清洁度,从而保证摄像机拍摄到图像的清晰度和准确度。
75.密封盖上密封设有如图13所示的连接管706,连接管与第四连接臂远离第三驱动装置的一端密封连接。连接管用于密封盖与第四连接臂之间的过度连接,使得密封盖与第四连接臂之间连接的密封性和连接效果更好。
76.密封盖上设有至少一根第一支撑柱707,第一支撑柱位于第一安装筒的内部,第一支撑柱上设有固定板708,摄像机设置在固定板上。第一支撑柱将固定板稳定的支撑在密封盖上,通过第一支撑柱的自身长度将固定板支撑在第一安装筒内的合适位置;固定板为摄像机提供安装位置,保证摄像机工作的稳定性。
77.第一支撑柱与密封盖的连接处设有第一弹性垫。第一支撑柱通过插杆与插槽相配合的方式与密封盖相连接;第一弹性垫为第一支撑柱与密封盖的连接处提供缓冲,防止因为意外碰撞使得摄像机发生抖动而影响到拍摄效果,也防止因为意外碰撞使得摄像机发生抖动而损坏。
78.固定板上设有多根第二支撑柱710,第二支撑柱远离固定板的一端设有挡环711,挡环与摄像机的摄像头相对,透视镜设置在挡环上。第二支撑柱为挡环提供安装位置,挡环又是用来定位透视镜的,第二支撑柱的自身长度也决定了摄像机透过透视镜之后的拍摄角度范围,所以第二支撑柱的自身长度以摄像机能够拍摄到合适的视场角度范围为准。
79.第二支撑柱与固定板的连接处设有第二弹性垫。第二支撑柱通过插杆与插槽相配合的方式与固定板相连接;第二弹性垫为第二支撑柱与固定板的连接处提供缓冲,防止因为意外碰撞使得固定板发生抖动而影响到摄像机的拍摄效果,也防止因为意外碰撞使得摄像机或透视镜发生抖动而损坏。
80.第一弹性垫和第二弹性垫均为弹簧垫。弹簧垫结构简单,价格低廉,具有良好的减震效果。
81.透视镜由高硼硅玻璃材质制成。由高硼硅玻璃材质制成的透视镜透光效果较好,强度也较高。
82.透视镜通过压环713设置在挡环上,压环与第一安装筒密封连接。压环使得透视镜
在挡环上安装的密封性和稳固性均更好。
83.刮水组件包括第三安装架7051,第三安装架设置在第一安装筒的内部,第三安装架上设有一组限位开关7052,第三安装架上设有第四电机7053,第四电机的驱动端设有输出轴7054,输出轴上设有拨动块7055,拨动块位于一组限位开关之间,输出轴远离第四电机的一端转动设有安装板7056,安装板上可拆卸设有刮水板7057,刮水板与透视镜相对应;第四电机与主电池、备用电池和控制板均电连接。第三安装架为限位开关和第四电机提供安装位置,保证限位开关和第四电机工作的稳定性;一组限位开关与控制板电连接,限位开关与拨动块相配合控制第四电机的正反转,从而实现刮水板往复对透视镜表面进行清洁的功能;安装板为刮水板提供安装位置。
84.第三安装架上设有第三安装块7058,一组限位开关设置在安装块上。第三安装块单独为限位开关提供安装位置,保证限位开关与拨动块相配合的稳定性,从而能更稳定的控制第四电机的正反转。
85.如图17和图18所示的照明装置包括第二安装筒801,第二安装筒与竖直摆动组件上靠近于摄像装置的位置或摄像装置密封连接,第二安装筒的内部设有第一承载板802,第一承载板上设有驱动板803,驱动板上设有散热板804,第二安装筒的内部设有第二承载板805,第二承载板上设有照明灯珠806,照明灯珠与驱动板电连接,第二安装筒上设有透光镜807,透光镜与照明灯珠相对,驱动板分别与主电池、备用电池和控制板电连接。驱动板与控制板电连接,用于根据控制板的信号控制照明灯珠的开关和明暗情况;散热板用于及时将驱动板上产生的热量疏散,防止驱动板过热,保证驱动板的使用寿命和使用安全;第二承载板为照明灯珠提供安装位置,保证照明灯珠工作的稳定性;其中照明灯珠为led灯珠;透光镜由高硼硅玻璃材质制成,具有透光效果较好和强度较高的特点。
86.第一承载板上设有至少一根第三支撑柱808,第二承载板设置在第三支撑柱远离第一承载板的一端。第三支撑柱为第二承载板提供安装位置,第三支撑柱的自身长度决定了第二承载板与透光镜之间的距离,由于照明灯珠是安装在第二承载板上的,第三支撑柱的自身长度就决定了照明灯珠可以照亮外部的范围和光强度,第三支撑柱的自身长度以照明灯珠照亮外部的范围和光强均均衡为准。
87.透光镜通过压盘809密封设置在第二安装筒上。压盘使得透光镜在第二安装筒上安装的稳固性和密封性均较好。
88.照明装置的照明方向向摄像装置倾斜。照明装置主要为摄像装置提供亮度,照明装置想着摄像装置倾斜具有更好的照明效果,具体倾斜角度为0度~60度;更优选,具体倾斜角度为15度~45度。
89.竖直摆动组件上靠近于摄像装置的位置或摄像装置上设有支撑段810,照明装置设置在支撑段上。支撑段为照明装置提供安装位置,使得照明装置相对于摄像装置的距离和位置均合适,照明装置能够为摄像装置提供合适强度和合适广度的照明。
90.第二安装筒密封设置在支撑段上。支撑段为第二安装筒密提供安装位置;此处的密封连接为通过法兰盘组件或抱箍组件密封连接。
91.第一连接臂、第二连接臂、第三连接臂和第四连接臂均有至少一根如图5和图6所示的连接段301组成,连接段的内部设有走线通道302,电连接的线穿过走线通道。第一连接臂、第二连接臂、第三连接臂和第四连接臂的具体长度,根据实际情况通过连接段相密封拼
接形成,具有很好的适应性;由于装置的整个电气部分是不能有水的,所以需要全密封,走线通道为电线或信号线提供安全的安装位置,保证整个装置的电气安全性。
92.多根连接段通过法兰盘组件1100和/或抱箍组件1200密封连接。法兰盘组件和抱箍组件可以根据实际情况灵活选择,均具有密封连接效果较好的特点;而且其中的抱箍组件连接方式,因为使用到的螺栓数量很少,所以安装也会变得更简单。
93.第一连接臂、第二连接臂、第三连接臂和第四连接臂与相应部件均通过兰盘组件和/或抱箍组件密封连接。法兰盘组件和抱箍组件可以根据实际情况灵活选择,均具有密封连接效果较好的特点;而且其中的抱箍组件连接方式,因为使用到的螺栓数量很少,所以安装也会变得更简单。
94.如图19和图20所示的法兰盘组件包括第一法兰盘1101和第二法兰盘1102,第一法兰盘与一根连接段的一端密封固定连接,第二法兰盘与另一根连接段的一端密封固定连接,第一法兰盘和第二法兰盘密封连接,第一法兰盘或第二法兰盘上设有碗形塞座1103,碗形塞座上设有碗形塞孔1104,碗形塞孔内设有碗形塞,碗形塞通过压盖1106压紧在碗形塞孔内,压盖位于第二法兰盘和第一法兰盘之间。通过碗形塞座、碗形塞孔和碗形塞相配合的结构,第一法兰盘和第二法兰盘通过螺栓相配合的时候,压盖将碗形塞牢牢的压紧在碗形塞孔内,电线或信号线从碗形塞的中孔通过,具有绝对的密封性,保证了整个装置内部均处于密封环境,保证了整个装置的电气安全性。
95.如图21、图22和图23所示的抱箍组件包括第一抱箍1201和第二抱箍1202,第一抱箍的外壁上设有第一螺孔1203和第二螺孔1204,第二抱箍的外壁上设有第三螺孔1205和第四螺孔1206,第三螺孔与第一螺孔相对应,第四螺孔与第二螺孔相对应,第三螺孔与第一螺孔通过螺栓密封连接,第四螺孔与第二螺孔通过螺栓密封连接。第一抱箍和第二抱箍通过两个螺栓就可以实现安装和拆卸了,具有操作简单,连接效果也较好的特点。
96.一个连接段的一端设有第一连接法兰1207,另一个连接段的一端设有第二连接法兰1208,第二连接法兰和第一连接法兰相对应,第二连接法兰和第一连接法兰通过第一抱箍和第二抱箍密封连接,第一连接法兰或第二连接法兰上设有碗形塞座1103,碗形塞座上设有碗形塞孔1104,碗形塞孔内设有碗形塞,碗形塞通过压盖1106压紧在碗形塞孔内,压盖位于第二连接法兰和第一连接法兰之间。通过碗形塞座、碗形塞孔和碗形塞相配合的结构,第一连接法兰和第二连接法兰相对准,第一抱箍和第二抱箍将第一连接法兰和第二连接法兰相抱紧,通过第一抱箍和第二抱箍用两个螺栓相锁紧时的锁紧作用力,压盖将碗形塞牢牢的压紧在碗形塞孔内,电线或信号线从碗形塞的中孔通过,具有绝对的密封性,保证了整个装置内部均处于密封环境,保证了整个装置的电气安全性;整个连接方式简单,连接后的密封效果较好。
97.初始状态时,第一连接臂、第二连接臂和第四连接臂位于同一平面上。
98.初始状态时,第一连接臂相对于水平面向下倾斜,倾斜角度为0度~15度。更优选,倾斜角度为2度~10度。
99.第一驱动装置的驱动端在水平方向的转动角度为0度~360度。更优选,第一驱动装置的驱动端在水平方向的转动角度为0度~320度。在该角度范围内摄像装置在一个环形轨迹上的拍摄已经没有死角了。
100.第二驱动装置的驱动端在竖直方向的转动角度为0度~360度。更优选,第二驱动
装置的驱动端在竖直方向的转动角度为0度~320度。更优选,第二驱动装置的驱动端在竖直方向的转动角度为0度~270度。更优选,第二驱动装置的驱动端在竖直方向的转动角度为0度~180度。
101.第三驱动装置的驱动端在竖直方向的转动角度为0度~360度。更优选,第一驱动装置的驱动端在水平方向的转动角度为0度~320度。在该角度范围内摄像装置在一个环形轨迹上的拍摄已经没有死角了。摄像装置位于水中的部分为零浮力设计,整个装置内部的角度转动,以水下部分不能超出水面为准。
102.网箱的形状为锥台形、球形或柱形。网箱的具体形状可以根据实际情况灵活设计,最好网箱选用规则形状,便于程序的写入,从而良好的实现对摄像机与网箱各壁面之间距离的精确控制。
103.主电池和备用电池为铅酸电池和/锂电池。主电池和备用电池均可以为可充电电池,可以通过外部的风能或太阳能之类的清洁能源进行充电。
104.一种网箱破网查漏方法,包括以下步骤,
105.(a)将处于初始状态的破网查漏装置置于水中的网箱内,破网查漏装置与网箱的顶部中心位置相对应;
106.(b)启动位于水中的破网查漏装置的电源开关,使得第一驱动装置、第二驱动装置、第三驱动装置、摄像装置和照明装置均处于启动状态;
107.(c)处于启动状态的破网查漏装置的控制板控制靠近于摄像装置的第三驱动装置在竖直方向转动,当摄像装置的拍摄方向与网箱的底部相垂直时,控制板控制第三驱动装置停止转动;此时,网箱底部的中心位置在摄像装置的拍摄视场角度范围内,摄像装置与网箱底部的距离为l;
108.(d)待步骤(c)中摄像装置的拍摄方向与网箱的底部相垂直时,控制板控制第一驱动装置的驱动端在水平方向转动320度~360度;
109.(e)待步骤(d)中的第一驱动装置转动完成后,控制板控制第二驱动装置和第三驱动装置的驱动端同时在竖直方向转动合适角度,在保证摄像装置的拍摄方向与网箱的底部相垂直的情况下,使得摄像装置向着网箱侧壁面的方向移动距离m;
110.(f)待步骤(e)中的摄像装置向着网箱侧壁面的方向移动距离m后,控制板控制第一驱动装置的驱动端在水平方向转动320度~360度;
111.(g)循环步骤(e)和(f),直到摄像装置拍摄完网箱的整个底面;
112.(h)待摄像装置拍摄完网箱的整个底面后,控制板控制第二驱动装置和第三驱动装置的驱动端同时在竖直方向转动合适角度,使得摄像装置的拍摄方向与网箱的侧壁面靠近底部的位置相垂直,并且使得摄像装置与网箱侧壁面之间的距离为s;
113.(i)待摄像装置的拍摄方向与网箱的侧壁面靠近底部的位置相垂直时,控制板控制第一驱动装置的驱动端在水平方向转动320度~360度;
114.(j)待步骤(i)中的第一驱动装置转动完成后,控制板控制第二驱动装置和第三驱动装置的驱动端同时在竖直方向转动合适角度,在保证摄像装置的拍摄方向与网箱的侧壁相垂直的情况下,使得摄像装置沿着网箱的侧壁面向着网箱顶部方向移动距离n;
115.(k)待步骤(j)中摄像装置向着网箱顶部方向移动距离n后,控制板控制第一驱动装置的驱动端在水平方向转动320度~360度;
116.(l)循环步骤(j)和(k),直到摄像装置拍摄完网箱的整个侧壁面。
117.本实用新型以摄像装置拍摄到网箱底面和壁面的图像为参考,采用图像视觉技术,控制板控制第二驱动装置和第三驱动装置协同转动,使得摄像装置的摄像端与网箱的底面和壁面始终处于垂直状态,正因为摄像端与网箱的底面和壁面处于垂直状态,就方便调控摄像装置与网箱的底面和壁面直接的距离,使得距离以能拍摄到网箱各面清晰的图像为准,若水质清晰,就可以通过控制第二驱动装置和第三驱动装置协同转动,使得摄像装置与网箱底面和壁面之间的距离远一点,若水质浑浊,通过控制第二驱动装置和第三驱动装置协同转动,使得摄像装置与网箱底面和壁面之间的距离近一点,整个拍摄过程中,摄像装置与网箱底面和/或壁面之间的距离是一样的,摄像装置相对于网箱的底面和壁面是相平行移动的,这样就能按照控制板上的设定程序进行自动运行了,对网箱网孔的检查方式简单、自动化程度较高、检查效果也较好;本实用新型中摄像装置每次移动的距离也是有限定的,根据摄像装置的拍摄视角,以相邻两个地方摄像装置在网箱上的拍摄区域存在重叠区域为准,这样就能保证对整个网箱上网孔的无死角检测了,从而能够保证整个网箱的绝对可靠度,不存在因网孔破陋使得水产品走失,也不存在因网孔堵塞而造成网箱内水产品缺氧的情况。
118.破网查漏装置的初始状态为第一连接臂、第二连接臂和第四连接臂位于同一平面的状态。
119.第一连接臂、第二连接臂和第四连接臂均位于水面以下。
120.摄像装置的拍摄视场角度α的范围为10度~120度。更优选,摄像装置的拍摄视场角度α的范围为30度~90度。更优选,摄像装置的拍摄视场角度α的范围为45度~70度。
121.移动距离m和移动距离n,以摄像装置相邻两个位置的拍摄视场角度α存在重叠区域为准。存在重叠区域能保证装置对网箱网孔整个检测的无死角。
122.距离l和距离s相等或不等;移动距离m和移动距离n相等或不等。
123.网箱破网查漏连接臂运行轨迹原理:
124.第一驱动装置:使用行星齿轮减速电机驱动,控制第一连接臂,按给定方向360
°
旋转;
125.第二驱动装置:使用行星齿轮减速电机驱动,控制第二连接臂,按要求上下摆动,范围0
‑
360
°
;
126.第一个第三驱动装置:使用舵机驱动,控制第一个第四连接臂,按给定角度摆动,范围0
‑
360
°
;
127.第二个第三驱动装置:使用舵机驱动,控制第二个第四连接臂,按给定角度摆动,范围0
‑
360
°
;
128.第一连接臂:长5.8米(第一驱动装置与第二驱动装置的中心距离)
129.第二连接臂:长6米(第二驱动装置与第一个第三驱动装置的中心距离)
130.第一个第四连接臂:长1.5米(第一个第三驱动装置与第二个第三驱动装置的中心距离)
131.第二个第四连接臂:长1.8米(第二个第三驱动装置中心到摄像机前端距离)
132.初始位置:整机的初始位置是各连接臂位于同一平面,且整体向下倾斜0.2
°
。
133.网箱尺寸:网箱整体形状为锥形,顶部直径25500mm,底部直径24500mm,高度
7000mm。
134.电子器件说明:
135.照明灯:2个,每个功率20w,电压12v;
136.摄像机:1个,功率20w,电压12v;
137.摄像机移动线速度:0.2m/s
138.第一电机:1个,功率120w,电压24v;
139.第二电机:1个,功率60w,电压24v;
140.舵机或第三电机:2个,功率30w,电压24v;
141.铅酸电池;
142.整机装配位置:破网查漏装置按照初始位置装配好之后,固定在网箱顶部中心位置,连接臂在水面之下。
143.摄像机运行轨迹说明:摄像机视场角80
°
,可视距离400mm,最大450mm,最小100mm;
144.摄像机先从网箱底部的中心开始查看,旋转一周后,摄像机向外移动660mm(根据第二连接臂的转动角度会有微量调整),然后再旋转一周,依次类推,直至把网箱底部都检查完毕,然后再偏转方向,检查网箱侧壁。为了避免网箱检查过程中出现遗漏区域或者重复检查区域,扫描的相邻两个可视区域需要有重叠部分,基本重叠区域40mm,最大重叠区域50mm,最小重叠区域20mm。除了网箱底部与侧壁间的夹角位置,检查其他位置时,摄像机使用保持与网箱垂直。
145.水上漂浮装置下沉水面30mm,多余的重力采用浮力泡沫来克服。第一连接臂靠近第一电机距离水面104.2mm。
146.摄像机运行轨迹
147.第一次圆周轨迹:第一连接臂保持位置不变,第二连接臂向下摆动角度32.9
°
,第一个第四连接臂与第二连接臂的夹角139.7
°
,第二个第四连接臂与网箱底部垂直。此时摄像机距离网箱底部大概400mm,可视范围超过网箱中心40mm,摄像机到达该位置后,第一连接臂旋转360
°
,停止。
148.第二次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角32.4
°
,第一个第四连接臂与第二连接臂夹角112.44
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
149.第三次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角34.7
°
,第一个第四连接臂与第二连接臂夹角92.86
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
150.第四次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角39
°
,第一个第四连接臂与第二连接臂夹角76.43
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
151.第五次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角45
°
,第一个第四连接臂与第二连接臂夹角62.16
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
152.第六次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角52.6
°
,第一个第四连接臂与第二连接臂夹角49.41
°
,第二个第四连接臂与网箱底部垂直。
摄像机到达该位置后,第一连接臂旋转360
°
,停止。
153.第七次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角61.5
°
,第一个第四连接臂与第二连接臂夹角38.24
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
154.第八次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角71.1
°
,第一个第四连接臂与第二连接臂夹角29.37
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
155.第九次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角80.4
°
,第一个第四连接臂与第二连接臂夹角24.6
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
156.第10次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角88.1
°
,第一个第四连接臂与第二连接臂夹角26.23
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
157.第11次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角94.3
°
,第一个第四连接臂与第二连接臂夹角34.07
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
158.第12次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角99.7
°
,第一个第四连接臂与第二连接臂夹角43.6
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
159.第13次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角104.9
°
,第一个第四连接臂与第二连接臂夹角53.93
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
160.第14次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角110.1
°
,第一个第四连接臂与第二连接臂夹角69.79
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
161.第15次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角115.5
°
,第一个第四连接臂与第二连接臂夹角85.34
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
162.第16次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角121.4
°
,第一个第四连接臂与第二连接臂夹角103.48
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
163.第17次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角128.4
°
,第一个第四连接臂与第二连接臂夹角126.68
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
164.第18次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角140.7
°
,第一个第四连接臂与第二连接臂夹角174.51
°
,第二个第四连接臂与网箱底部垂直。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
165.第19次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角141.9
°
,第一个第四连接臂与第二连接臂夹角217.75
°
,第二个第四连接臂与网箱底部夹角
50.54
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
166.第20次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角126.9
°
,第一个第四连接臂与第二连接臂夹角188.52
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
167.第21次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角118.7
°
,第一个第四连接臂与第二连接臂夹角126.01
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
168.第22次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角119.7
°
,第一个第四连接臂与第二连接臂夹角103.59
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
169.第23次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角122.9
°
,第一个第四连接臂与第二连接臂夹角85.97
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
170.第24次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角127.9
°
,第一个第四连接臂与第二连接臂夹角70.91
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
171.第25次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角134.5
°
,第一个第四连接臂与第二连接臂夹角57.67
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
172.第26次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角142.5
°
,第一个第四连接臂与第二连接臂夹角46.06
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
173.第27次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角151.5
°
,第一个第四连接臂与第二连接臂夹角36.4
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
174.第28次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角160.8
°
,第一个第四连接臂与第二连接臂夹角29.52
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
175.第29次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角169.2
°
,第一个第四连接臂与第二连接臂夹角27.97
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
176.第30次圆周轨迹:第一连接臂保持位置不变,第二连接臂与第一连接臂夹角171.1
°
,第一个第四连接臂与第二连接臂夹角28.28
°
,第二个第四连接臂与网箱底部夹角4.09
°
。摄像机到达该位置后,第一连接臂旋转360
°
,停止。
177.至此,网箱检查完毕,连接臂收回到初始位置。
178.如图24所示的控制板单片机电路,采用stm32f103rct6,其中y1、c3和c4形成晶振电路,r2和c5形成复位电路。
179.如图25、图26和图27所示的控制电路,由上拉电阻和滤波电容构成,用于控制板对各连接臂、摄像机和照明灯的控制。