1.本实用新型涉及仿生鱼尾驱动技术领域,具体是一种曲柄摆杆的仿生鱼尾推进装置。
背景技术:
2.仿生鱼是根据仿生学原理设计制造的,它们游动起来酷似真正的鲤鱼,身体在电机的推动下来回摆动,并用鳍和尾来改变它们的游动方向,仿生鱼广泛已用于观赏、娱乐、水质监测、科学研究等领域。
3.现有技术的仿生鱼尾推进装置结构较为复杂,制造成本高,维修不方便,且效率低,能耗高,使用寿命短。因此,本领域技术人员提供了一种曲柄摆杆的仿生鱼尾推进装置,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种曲柄摆杆的仿生鱼尾推进装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种曲柄摆杆的仿生鱼尾推进装置,包括机箱和鱼尾板,所述机箱的内壁固定连接有驱动电机,且驱动电机的驱动端固定连接有驱动轴,所述驱动轴远离驱动电机的一端固定连接有凸轮,且凸轮远离其旋转中心的一端固定连接有第一滑块,所述机箱的内壁通过第一转轴转动连接有第一摆杆,且第一摆杆的侧壁开设有第一滑口,所述第一滑块插设于第一滑口中并与其滑动连接,所述第一摆杆远离驱动电机的一端固定连接有扇形齿轮,所述机箱的内壁固定连接有固定套,且固定套的侧壁插设并滑动连接有移动杆,所述移动杆的侧壁固定连接有与扇形齿轮啮合连接的齿条,且移动杆远离齿条的一侧通过第二转轴转动连接有第二摆杆,所述机箱的一侧开设有开口,且第二摆杆远离第二转轴的一端贯穿开口向外延伸并与鱼尾板固定连接,位于开口下方所述机箱的一侧固定连接有限位机构,且限位机构的一端与第二摆杆滑动连接。
6.作为本实用新型再进一步的方案:所述限位机构包括固定在机箱一侧的固定块,所述固定块的上侧固定连接有第二滑块,位于机箱外侧所述第二摆杆的侧壁开设有第二滑口,且第二滑块贯穿延伸至第二滑口中并与其滑动连接。
7.作为本实用新型再进一步的方案:所述驱动轴、第一转轴和限位机构位于同一直线上。
8.作为本实用新型再进一步的方案:所述机箱的一侧固定连接有plc控制器,且驱动电机的一端与plc控制器电性连接。
9.作为本实用新型再进一步的方案:所述固定套的数量为两个,且两个固定套分别位于开口的两侧对称设置。
10.作为本实用新型再进一步的方案:所述鱼尾板与第二摆杆远离第二转轴的一端采用焊接的方式固定连接。
11.与现有技术相比,本实用新型的有益效果是:通过启动驱动电机工作,带动驱动轴转动,进而带动凸轮转动,此时,带动第一滑块以驱动轴为圆心作圆周运动,由于第一滑块与第一滑口滑动连接,可带动第一摆杆以第一转轴为圆心做摆动运动,此时,带动扇形齿轮跟随做摆动运动,由于扇形齿轮与齿条啮合,进而带动移动杆在固定套上做往复位移运动,由于第二摆杆的位移跟随第二滑口受到第二滑块的限制,进而拉动第二摆杆产生摆动,进而带动鱼尾板产生摆动运作,实现仿生鱼尾的推进功能,结构设计巧妙,零部件简单易购买,维修方便,制造成本低,使用寿命长,且能耗小。
附图说明
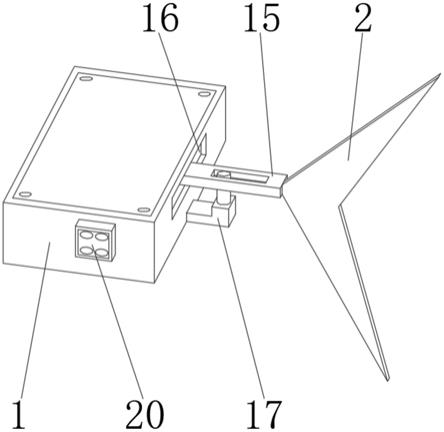
12.图1为一种曲柄摆杆的仿生鱼尾推进装置的立体结构示意图;
13.图2为一种曲柄摆杆的仿生鱼尾推进装置中机箱处的俯视剖面结构示意图;
14.图3为一种曲柄摆杆的仿生鱼尾推进装置中固定块处的立体结构示意图。
15.图中:1、机箱;2、鱼尾板;3、驱动电机;4、驱动轴;5、凸轮;6、第一滑块;7、第一转轴;8、第一摆杆;9、第一滑口;10、扇形齿轮;11、固定套;12、移动杆;13、齿条;14、第二转轴;15、第二摆杆;16、开口;17、固定块;18、第二滑块;19、第二滑口;20、plc控制器。
具体实施方式
16.请参阅图1~3,本实用新型实施例中,一种曲柄摆杆的仿生鱼尾推进装置,包括机箱1和鱼尾板2,机箱1的内壁固定连接有驱动电机3,且驱动电机3的驱动端固定连接有驱动轴4,驱动轴4远离驱动电机3的一端固定连接有凸轮5,且凸轮5远离其旋转中心的一端固定连接有第一滑块6,机箱1的内壁通过第一转轴7转动连接有第一摆杆8,且第一摆杆8的侧壁开设有第一滑口9,第一滑块6插设于第一滑口9中并与其滑动连接,第一摆杆8远离驱动电机3的一端固定连接有扇形齿轮10,机箱1的内壁固定连接有固定套11,且固定套11的侧壁插设并滑动连接有移动杆12,移动杆12的侧壁固定连接有与扇形齿轮10啮合连接的齿条13,且移动杆12远离齿条13的一侧通过第二转轴14转动连接有第二摆杆15,机箱1的一侧开设有开口16,且第二摆杆15远离第二转轴14的一端贯穿开口16向外延伸并与鱼尾板2固定连接,位于开口16下方机箱1的一侧固定连接有限位机构,且限位机构的一端与第二摆杆15滑动连接,启动驱动电机3工作,带动驱动轴4转动,进而带动凸轮5转动,此时,带动第一滑块6以驱动轴4为圆心作圆周运动,由于第一滑块6与第一滑口9滑动连接,可带动第一摆杆8以第一转轴7为圆心做摆动运动,此时,带动扇形齿轮10跟随做摆动运动,由于扇形齿轮10与齿条13啮合,进而带动移动杆12在固定套11上做往复位移运动,由于第二摆杆15的位移受到限位机构的限制,进而拉动第二摆杆15产生摆动,进而带动鱼尾板2产生摆动运作,实现仿生鱼尾的推进功能,结构设计巧妙,零部件简单易购买,维修方便,制造成本低,使用寿命长,且能耗小;
17.在图1和图3中:限位机构包括固定在机箱1一侧的固定块17,固定块17的上侧固定连接有第二滑块18,位于机箱1外侧第二摆杆15的侧壁开设有第二滑口19,且第二滑块18贯穿延伸至第二滑口19中并与其滑动连接,使第二摆杆15的位移跟随第二滑口19受到第二滑块18的限制;
18.在图2中:驱动轴4、第一转轴7和限位机构位于同一直线上,驱动方便,摩擦力低;
19.在图1中:机箱1的一侧固定连接有plc控制器20,且驱动电机3的一端与plc控制器20电性连接,操控方便,为现有技术;
20.在图2中:固定套11的数量为两个,且两个固定套11分别位于开口16的两侧对称设置,对移动杆12的位移起到支撑稳定的作用;
21.在图1中:鱼尾板2与第二摆杆15远离第二转轴14的一端采用焊接的方式固定连接,连接牢靠,使用寿命长。
22.本实用新型的工作原理是:当本装置工作时,启动驱动电机3工作,带动驱动轴4转动,进而带动凸轮5转动,此时,带动第一滑块6以驱动轴4为圆心作圆周运动,由于第一滑块6与第一滑口9滑动连接,可带动第一摆杆8以第一转轴7为圆心做摆动运动,此时,带动扇形齿轮10跟随做摆动运动,由于扇形齿轮10与齿条13啮合,进而带动移动杆12在固定套11上做往复位移运动,由于第二摆杆15的位移跟随第二滑口19受到第二滑块18的限制,进而拉动第二摆杆15产生摆动,进而带动鱼尾板2产生摆动运作,实现仿生鱼尾的推进功能,结构设计巧妙,零部件简单易购买,维修方便,制造成本低,使用寿命长,且能耗小。
23.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。