1.本发明属于机械技术领域,涉及一种水下机器人部件,特别是一种水下机器人脱钩装置及其释放方法和回收方法。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
3.就海洋垂直的剖面来分,海洋又可以分成1、上层水团,2、跃温层,3、深层水团。
4.1.上层水团的海水受到风吹的作用,而产生浪和洋流两种之波动,这使得上层的海水得以充分混合.浪的大小当然决定於风吹袭的强度.波浪的大小可以从几公分的涟漪,大到暴风雨时,高达30公尺的狂涛.除了波浪的高度外,波浪的波长也很重要,像地震、海底火山爆发所产生的海啸,对海岸环境的破坏相当严重。
5.2.所谓斜温层,是指某区域的海水温度变化量大於其上层的海水区域,往往是鱼群喜爱的藏匿位置。
6.3.深层水团的流动非常缓慢,通常需要数百年的时间才能越过整个海盆。
7.综上,在水下机器人下放至海洋深层的过程中,先要经过上层水团,故需要解决水下机器人在上层水团的稳定性问题。
8.现有技术中仅通过一根缆绳对水下机器人进行下放,因缆绳相对柔软轻盈的特点,在流速较高的水层中容易被海浪平向带走,进而导致对水下机器人的下放地点远远超出目标区域范围,导致水下作业误差范围大,影响对目标区域的准确研究。
技术实现要素:
9.本发明的目的是针对现有的技术存在上述问题,提出了一种在缆绳外周包覆可伸缩的管体,且多根缆绳相配合完成升降、释放和牵引等综合性功能的水下机器人脱钩装置及其释放方法和回收方法。
10.本发明的目的可通过下列技术方案来实现:一种水下机器人脱钩装置,包括控制器、驱动电机、释放电机和牵引电机,还包括若干节逐层嵌套的导向管,所述导向管的内壁沿轴向至少设置一条导滑槽,所述导向管的端部外壁上铰接导滑轮,相邻嵌套的内层导向管的所述导滑轮嵌入外层导向管的所述导滑槽内形成滑动连接,位于最末节导向管的底端设置释放钩,所述释放钩包括呈拼合封闭的固定钩和活动钩,所述固定钩的勾尖上固设磁铁一,所述活动钩的勾尖上固设磁铁二,所述磁铁一与所述磁铁二相吸合,最末节导向管的底端内壁固设导向筒,所述导向筒底端为敞口,所述活动钩的顶部固连导向柱,所述导向柱上套接复位弹簧,所述导向柱与所述复位弹簧穿入所述导向筒内,所述复位弹簧的上端抵靠所述导向筒的顶壁,下端抵靠所述导向柱的环形台;
11.所述驱动电机的输出轴上固套驱动棘轮,所述驱动棘轮外周呈单向转动套接驱动滚筒,所述驱动滚筒上缠绕升降绳,所述升降绳穿入若干节所述导向管并与最末节导向管的底端相固连;所述释放电机的输出轴上固套释放棘轮,所述释放棘轮外周呈单向转动套接释放滚筒,所述释放滚筒上缠绕释放绳,所述释放绳穿入若干节所述导向管并穿入所述导向筒与所述导向柱固连;所述牵引电机的输出轴上固套牵引棘轮,所述牵引棘轮外周呈单向转动套接牵引滚筒,所述牵引滚筒上缠绕牵引绳,所述牵引绳穿入若干节所述导向管并由底端穿出固连水下机器人,所述牵引绳与所述水下机器人之间顺次串接限位球、套环,所述限位球与最末节导向管的底口形成顶靠定位,所述套环套接于呈闭合状态的所述释放钩上;
12.所述水下机器人上装设流速传感器,所述流速传感器通过电信号与所述控制器相连接,所述控制器通过电路电控连接所述驱动电机、所述释放电机和所述牵引电机。
13.在上述的水下机器人脱钩装置中,所述驱动滚筒的中通腔内固设至少一个驱动棘爪,所述驱动棘爪与所述驱动棘轮形成正时针转向滑动连接,逆时针卡接;所述释放滚筒的中通腔内固设至少一个释放棘爪,所述释放棘爪与所述释放棘轮形成正时针转向滑动连接,逆时针卡接;所述牵引滚筒的中通腔内固设至少一个牵引棘爪,所述牵引棘爪与所述牵引棘轮形成正时针转向滑动连接,逆时针卡接。
14.在上述的水下机器人脱钩装置中,位于第一节导向管的首端内壁上固设驱动首环、释放首环和牵引首环,位于最末节导向管的下端内壁上固设驱动尾环、释放尾环和牵引尾环,所述升降绳对应穿入呈对正设置的所述驱动首环和驱动尾环中,所述释放绳对应穿入呈对正设置的所述释放首环和释放尾环中,所述牵引绳对应穿入呈对正设置的所述牵引首环和牵引尾环中。
15.在上述的水下机器人脱钩装置中,所述导滑槽的上下两端均设置限位堵头,所述导滑轮抵靠所述限位堵头形成限位卡接。
16.在上述的水下机器人脱钩装置中,所述导向管的上端具有外翻沿,所述导向管的下端具有内翻沿,相邻嵌套的内层导向管的所述外翻沿与外层导向管的所述內翻沿形成抵靠卡接。
17.在上述的水下机器人脱钩装置中,所述导向管为截面为椭圆形的扁管,所述导向管具体为橡胶管。
18.在上述的水下机器人脱钩装置中,每根所述导向管的导滑槽设置两条,两条所述导滑槽呈对称位于所述扁管的椭圆形内壁两头;每根所述导向管的导滑轮设置两个,两个所述导滑轮呈对称位于所述扁管的椭圆形外壁两头。
19.水下机器人脱钩装置的释放方法,包括以下步骤:
20.1)、将水下机器人放入水中,控制器操控驱动电机、释放电机和牵引电机的输出轴同步正时针转动,从而使驱动滚筒转动释放升降绳,释放滚筒放出释放绳,牵引滚筒释放牵引绳,相邻两根导向管通过导滑轮沿导滑槽滑移伸展以确保稳定性,由此逐层嵌套的若干节导向管逐渐伸展开,升降绳、释放绳和牵引绳均在若干节导向管内部,一则形成绳体保护,二则提供支撑力,避免水下机器人被急流卷走,保障其在预判水域范围内;
21.2)、在水下机器人逐渐下入深水的过程中,通过流速传感器将时刻水流信号发送至控制器,由控制器进行水流数据监测,一旦控制器检测到水流数据达到设定的平流数值
时,控制器操控驱动电机、释放电机和牵引电机同步停机;
22.3)、控制器操控释放电机的输出轴逆时针转动,带动释放绳向上提升,从而将释放绳尾端固连的导向柱沿导向筒上移并压缩复位弹簧,带动活动钩上移与固定钩解除吸合,两者之间产生分离间隙;控制器操控牵引电机的输出轴继续正时针转动,牵引绳持续释放使套环从分离间隙脱离释放钩,继续下方水下机器人实现其在平稳的水流中进行作业;控制器操控释放电机的输出轴正时针转动半圈以放松释放绳,在复位弹簧的弹力作用下推动导向柱下移,使活动钩与固定钩再次吸合。
23.在上述的水下机器人脱钩装置的释放方法中,当驱动电机、释放电机和牵引电机的输出轴同向正时针转动,产生同步误差时,升降绳、释放绳、牵引绳中至少一根发生张紧状态,对应张紧状态的驱动滚筒、释放滚筒和/或牵引滚筒绕棘轮结构正时针转动以作调整。
24.水下机器人脱钩装置的回收方法,包括以下步骤:
25.1)、控制器操控释放电机的输出轴逆时针转动,带动释放绳向上提升,从而将释放绳尾端固连的导向柱沿导向筒上移并压缩复位弹簧,带动活动钩上移与固定钩解除吸合,并保持使两者之间产生分离间隙;
26.2)、控制器操控牵引电机的输出轴持续逆时针转动,通过回卷牵引绳逐渐将水下机器人拉回,直至牵引绳上的限位球顶靠在最末节导向管的底口上,控制器操控牵引电机停机,此时牵引绳上的套环因回收到位通过分离间隙自动套接在释放钩上,控制器操控释放电机的输出轴正时针转动半圈以放松释放绳,在复位弹簧的弹力作用下推动导向柱下移,使活动钩与固定钩再次吸合以钩锁套环;
27.3)、控制器操控驱动电机、释放电机和牵引电机的输出轴同步逆时针转动,从而使驱动滚筒转动回收升降绳,释放滚筒回收释放绳,牵引滚筒回收牵引绳,相邻两根导向管通过导滑轮沿导滑槽滑移回缩以确保稳定性,由此逐层嵌套的若干节导向管逐渐缩回,直至将水下机器人脱离水下。
28.与现有技术相比,本水下机器人脱钩装置及其释放方法和回收方法具有以下优点:
29.1、通过若干逐层嵌套的导向管对缆绳起到保护作用,另外利用导向管的支撑硬度提供伸入水下的垂直性,避免过于湍急的水流将缆绳拽离作业水域,确保水下机器人到达正确的水下位置。
30.2、通过机械提升打开套接水下机器人的钩锁结构,通过弹力和磁性力自动恢复钩锁闭合,由此实现非电动的自动开闭释放功能,一则避免电动脱钩容易进水失效的问题,二则钩锁牢固可靠,自动性强,成功率高。
31.3、通过多根缆绳对水下机器人共同起到升降作用,避免单根缆绳断裂导致水下机器人发生失联事故,同时提高了连接强度,延长使用寿命。
32.4、巧妙利用棘轮的单向转动原理,在下放水下机器人的过程中,能够对不同张紧程度的缆绳进行平衡调整,从而确保承受力的均衡性,延长使用寿命。
附图说明
33.图1是本水下机器人脱钩装置的导向管结构图。
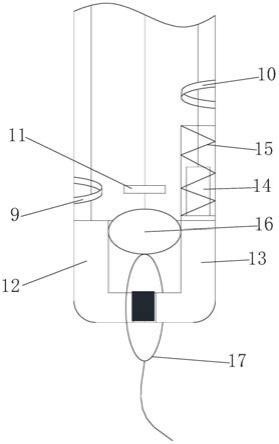
34.图2是本水下机器人脱钩装置的释放钩锁闭结构图。
35.图3是本水下机器人脱钩装置的释放钩开启结构图。
36.图4是本水下机器人脱钩装置的棘轮结构图。
37.图中,1、导向管;2、导滑轮;3、驱动首环;4、释放首环;5、牵引首环;6、升降绳;7、释放绳;8、牵引绳;9、驱动尾环;10、释放尾环;11、牵引尾环;12、固定钩;13、活动钩;14、导向柱;15、复位弹簧;16、限位球;17、套环;18、驱动棘轮;19、驱动滚筒;20、驱动棘爪。
具体实施方式
38.下面结合附图和具体实施例对本发明的具体实施方式做进一步说明:
39.如图1至图4所示,本水下机器人脱钩装置,包括控制器、驱动电机、释放电机和牵引电机,还包括若干节逐层嵌套的导向管1,导向管1的内壁沿轴向至少设置一条导滑槽,导向管1的端部外壁上铰接导滑轮2,相邻嵌套的内层导向管1的导滑轮2嵌入外层导向管1的导滑槽内形成滑动连接,位于最末节导向管1的底端设置释放钩,释放钩包括呈拼合封闭的固定钩12和活动钩13,固定钩12的勾尖上固设磁铁一,活动钩13的勾尖上固设磁铁二,磁铁一与磁铁二相吸合,最末节导向管1的底端内壁固设导向筒,导向筒底端为敞口,活动钩13的顶部固连导向柱14,导向柱14上套接复位弹簧15,导向柱14与复位弹簧15穿入导向筒内,复位弹簧15的上端抵靠导向筒的顶壁,下端抵靠导向柱14的环形台;
40.驱动电机的输出轴上固套驱动棘轮18,驱动棘轮18外周呈单向转动套接驱动滚筒19,驱动滚筒19上缠绕升降绳6,升降绳6穿入若干节导向管1并与最末节导向管1的底端相固连;释放电机的输出轴上固套释放棘轮,释放棘轮外周呈单向转动套接释放滚筒,释放滚筒上缠绕释放绳7,释放绳7穿入若干节导向管1并穿入导向筒与导向柱14固连;牵引电机的输出轴上固套牵引棘轮,牵引棘轮外周呈单向转动套接牵引滚筒,牵引滚筒上缠绕牵引绳8,牵引绳8穿入若干节导向管1并由底端穿出固连水下机器人,牵引绳8与水下机器人之间顺次串接限位球16、套环17,限位球16与最末节导向管1的底口形成顶靠定位,套环17套接于呈闭合状态的释放钩上;
41.水下机器人上装设流速传感器,流速传感器通过电信号与控制器相连接,控制器通过电路电控连接驱动电机、释放电机和牵引电机。
42.驱动滚筒19的中通腔内固设至少一个驱动棘爪20,驱动棘爪20与驱动棘轮18形成正时针转向滑动连接,逆时针卡接;释放滚筒的中通腔内固设至少一个释放棘爪,释放棘爪与释放棘轮形成正时针转向滑动连接,逆时针卡接;牵引滚筒的中通腔内固设至少一个牵引棘爪,牵引棘爪与牵引棘轮形成正时针转向滑动连接,逆时针卡接。
43.位于第一节导向管1的首端内壁上固设驱动首环3、释放首环4和牵引首环5,位于最末节导向管1的下端内壁上固设驱动尾环9、释放尾环10和牵引尾环11,升降绳6对应穿入呈对正设置的驱动首环3和驱动尾环9中,释放绳7对应穿入呈对正设置的释放首环4和释放尾环10中,牵引绳8对应穿入呈对正设置的牵引首环5和牵引尾环11中。
44.每条绳索的首尾均对应套接限制环,且不同组限制环之间余留合理距离,由此将每条绳索相对固定位置,从而避免绳索在抽拉过程中形成缠绕,或者相互摩擦导致磨损,既能保障对水下机器人收放的有效操作,又能延长绳索的使用寿命,避免断裂导致水下机器人遭受碰撞损伤。
45.导滑槽的上下两端均设置限位堵头,导滑轮2抵靠限位堵头形成限位卡接。当导滑轮2沿导滑槽滑移至顶位或底位时,通过限位堵头进行挡设,避免导滑轮2脱离导滑槽,即避免相邻两根导向管1脱离。
46.导向管1的上端具有外翻沿,导向管1的下端具有内翻沿,相邻嵌套的内层导向管1的外翻沿与外层导向管1的內翻沿形成抵靠卡接。当相邻嵌套的两根导向管1完全伸展开,通过外层导向管1的管尾与内层导向管1的管首形成卡接,进一步避免相邻两根导向管1脱离。
47.导向管1为截面为椭圆形的扁管,导向管1具体为橡胶管。导向管1采用耐腐蚀的橡胶管,由此避免管体在盐水中受到腐蚀,延长使用寿命。
48.每根导向管1的导滑槽设置两条,两条导滑槽呈对称位于扁管的椭圆形内壁两头;每根导向管1的导滑轮2设置两个,两个导滑轮2呈对称位于扁管的椭圆形外壁两头。
49.水下机器人脱钩装置的释放方法,包括以下步骤:
50.1)、将水下机器人放入水中,控制器操控驱动电机、释放电机和牵引电机的输出轴同步正时针转动,从而使驱动滚筒19转动释放升降绳6,释放滚筒放出释放绳7,牵引滚筒释放牵引绳8,相邻两根导向管1通过导滑轮2沿导滑槽滑移伸展以确保稳定性,由此逐层嵌套的若干节导向管1逐渐伸展开,升降绳6、释放绳7和牵引绳8均在若干节导向管1内部,一则形成绳体保护,二则提供支撑力,避免水下机器人被急流卷走,保障其在预判水域范围内;
51.2)、在水下机器人逐渐下入深水的过程中,通过流速传感器将时刻水流信号发送至控制器,由控制器进行水流数据监测,一旦控制器检测到水流数据达到设定的平流数值时,控制器操控驱动电机、释放电机和牵引电机同步停机;
52.3)、控制器操控释放电机的输出轴逆时针转动,带动释放绳7向上提升,从而将释放绳7尾端固连的导向柱14沿导向筒上移并压缩复位弹簧15,带动活动钩13上移与固定钩12解除吸合,两者之间产生分离间隙;控制器操控牵引电机的输出轴继续正时针转动,牵引绳8持续释放使套环17从分离间隙脱离释放钩,继续下方水下机器人实现其在平稳的水流中进行作业;控制器操控释放电机的输出轴正时针转动半圈以放松释放绳7,在复位弹簧15的弹力作用下推动导向柱14下移,使活动钩13与固定钩12再次吸合。
53.本水下机器人脱钩装置的释放方法的运行原则为,通过管体的支撑硬度保证在穿过湍流层时基本竖直下方,达到平流层后再利用缆绳自由下方水下机器人,从而有效保证水下机器人下放至要求目的地,避免过大的偏离误差。
54.当驱动电机、释放电机和牵引电机的输出轴同向正时针转动,产生同步误差时,升降绳6、释放绳7、牵引绳8中至少一根发生张紧状态,对应张紧状态的驱动滚筒19、释放滚筒和/或牵引滚筒绕棘轮结构正时针转动以作调整。
55.水下机器人脱钩装置的回收方法,包括以下步骤:
56.1)、控制器操控释放电机的输出轴逆时针转动,带动释放绳7向上提升,从而将释放绳7尾端固连的导向柱14沿导向筒上移并压缩复位弹簧15,带动活动钩13上移与固定钩12解除吸合,并保持使两者之间产生分离间隙;
57.2)、控制器操控牵引电机的输出轴持续逆时针转动,通过回卷牵引绳8逐渐将水下机器人拉回,直至牵引绳8上的限位球16顶靠在最末节导向管1的底口上,控制器操控牵引电机停机,此时牵引绳8上的套环17因回收到位通过分离间隙自动套接在释放钩上,控制器
操控释放电机的输出轴正时针转动半圈以放松释放绳7,在复位弹簧15的弹力作用下推动导向柱14下移,使活动钩13与固定钩12再次吸合以钩锁套环17;
58.3)、控制器操控驱动电机、释放电机和牵引电机的输出轴同步逆时针转动,从而使驱动滚筒19转动回收升降绳6,释放滚筒回收释放绳7,牵引滚筒回收牵引绳8,相邻两根导向管1通过导滑轮2沿导滑槽滑移回缩以确保稳定性,由此逐层嵌套的若干节导向管1逐渐缩回,直至将水下机器人脱离水下。
59.与现有技术相比,本水下机器人脱钩装置及其释放方法和回收方法具有以下优点:
60.1、通过若干逐层嵌套的导向管1对缆绳起到保护作用,另外利用导向管1的支撑硬度提供伸入水下的垂直性,避免过于湍急的水流将缆绳拽离作业水域,确保水下机器人到达正确的水下位置。
61.2、通过机械提升打开套接水下机器人的钩锁结构,通过弹力和磁性力自动恢复钩锁闭合,由此实现非电动的自动开闭释放功能,一则避免电动脱钩容易进水失效的问题,二则钩锁牢固可靠,自动性强,成功率高。
62.3、通过多根缆绳对水下机器人共同起到升降作用,避免单根缆绳断裂导致水下机器人发生失联事故,同时提高了连接强度,延长使用寿命。
63.4、巧妙利用棘轮的单向转动原理,在下放水下机器人的过程中,能够对不同张紧程度的缆绳进行平衡调整,从而确保承受力的均衡性,延长使用寿命。
64.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
65.尽管本文较多地使用了导向管1;导滑轮2;驱动首环3;释放首环4;牵引首环5;升降绳6;释放绳7;牵引绳8;驱动尾环9;释放尾环10;牵引尾环11;固定钩12;活动钩13;导向柱14;复位弹簧15;限位球16;套环17;驱动棘轮18;驱动滚筒19;驱动棘爪20等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。