1.本发明属于航行体领域,具体涉及一种尾环稳定高速入水航行体。
背景技术:
2.航行体高速入水过程一般可分为撞水、侵水、开空泡、空泡闭合以及空泡溃灭这五个阶段。在撞水阶段中主要面临的问题是航行体承受较大的入水载荷,将会对其结构及内部零件产生破坏,因此该阶段主要研究方向为如何减小入水冲击。在侵水阶段中,由于入水时的初始扰动,航行体受力不平衡,产生较大的力矩阶跃变化,航行体入水过程中伴随较大的姿态角速度,进而形成尾拍现象。在开空泡和空泡闭合阶段,尾拍持续进行,水下的空泡不断扩张,然而随着射弹运动的深入,在水的表面张力及流体动力的共同作用下,自由液面处空泡口附近受扰动的流体逐渐趋于原本静止的状态,同时由于高速流动的空气使得空泡颈部内的压力降低,此时空泡颈部内外的压差也使空泡颈部不断缩小直至闭合,空泡随着航行体的运动与自由液面分离,即发生拉脱,空泡闭合。随着空泡的闭合空泡迅速收缩至航行体表面,空泡溃灭。
技术实现要素:
3.本发明提供一种尾环稳定高速入水航行体,为解决现有高速入水航行体冲击载荷大、入水弹道稳定性差的问题。
4.本发明通过以下技术方案实现:
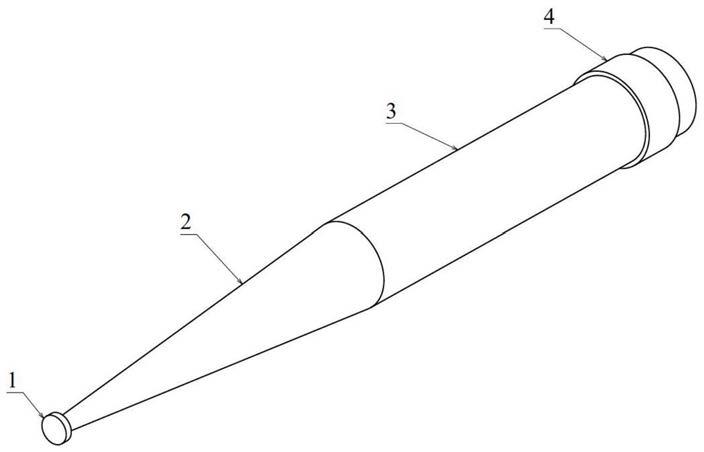
5.一种尾环稳定高速入水航行体,所述航行体包括空化器1、圆锥段2、圆柱段3和尾环4,所述空化器1与圆锥段2相连接,所述圆锥段2与圆柱段3相连接,所述圆柱段3的尾部套设尾环4。
6.进一步的,所述空化器1为平头圆盘空化器。
7.进一步的,所述空化器1设置在圆锥段2的头部,所述圆锥段2的尾部与圆柱段3的头部相连接。
8.进一步的,所述航行体的总长为l。
9.进一步的,所述航行体的总长l与圆柱段3的直径d的比值为11~21。
10.进一步的,所述空化器1的直径d0为圆柱段3的直径d的1/4~1/3。
11.进一步的,所述尾环4的高度h不大于圆柱段3的直径d的1/10。
12.进一步的,所述尾环4的高度d为圆柱段3的直径d的5倍。
13.本发明的有益效果是:
14.本发明的航行体应用了超空泡航行体外形保证入水减阻的基础上减小入水冲击,从而增大航行体的有效航程,减小由于冲击对航行体元器件带来的危害
15.本发明为了维持入水弹道的稳定性,航行体采用了尾环稳定弹道的方式,可以有效地使尾拍稳定发生在尾环处,从而增加弹道的可预测性。
16.本发明还可以通过调节尾环位置及尺寸设计航行体入水弹道。
附图说明
17.图1本发明的结构示意图。
18.图2本发明的尺寸图。
19.图3本发明的运动稳定机制示意图。
具体实施方式
20.下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.一种尾环稳定高速入水航行体,所述航行体包括空化器1、圆锥段2、圆柱段3和尾环4,所述空化器1与圆锥段2相连接,所述圆锥段2与圆柱段3相连接,所述圆柱段3的尾部套设尾环4。
22.进一步的,所述空化器1为平头圆盘空化器。
23.进一步的,所述空化器1设置在圆锥段2的头部,所述圆锥段2的尾部与圆柱段3的头部相连接。
24.进一步的,所述航行体的总长为l。
25.进一步的,所述航行体的总长l与圆柱段3的直径d的比值为11~21。大部分取15左右。
26.进一步的,所述空化器1的直径d0为圆柱段3的直径d的1/4~1/3。
27.进一步的,所述尾环4的高度h不大于圆柱段3的直径d的1/10。
28.进一步的,所述尾环4的高度d为圆柱段3的直径d的5倍。
29.根据公式其中c
x
为阻力系数,对于圆盘空化器阻力系数为0.82,ρ为水的密度,v为航行体速度,s为参考面积,取头部面积为参考面积,
30.由于超空泡外形航行体头部面积减小,入水冲击载荷约为常规航行体的
31.由于本发明航行体增加了尾环,显著增加了高速入水弹道稳定性,改善了普通航行体入水弹道易弯曲、直线性较差的特点,大幅增加了弹道的直线性和可预测性。主要原理是采用弹力稳定机制:空泡流型为航行体后方较远处的自由闭合流型。在这种空泡流型下,因初始扰动,引起航行体尾部撞击空泡内部,经过撞击后航行体阻尼振荡,趋于稳定,或者周期性交替撞击上下空泡壁面,在不断地撞击中保持动态稳定。由于加入了尾环设计,尾拍的位置会稳定发生在尾环处。
32.通过设计调节尾环的位置及尺寸可以对航行体入水弹道进一步设计。同时,可以通过对尾环结构加强,防止尾拍对航行体结构造成损坏。
技术特征:
1.一种尾环稳定高速入水航行体,其特征在于,所述航行体包括空化器(1)、圆锥段(2)、圆柱段(3)和尾环(4),所述空化器(1)与圆锥段(2)相连接,所述圆锥段(2)与圆柱段(3)相连接,所述圆柱段(3)的尾部套设尾环(4)。2.根据权利要求1所述一种尾环稳定高速入水航行体,其特征在于,所述空化器(1)为平头圆盘空化器。3.根据权利要求1或2所述一种尾环稳定高速入水航行体,其特征在于,所述空化器(1)设置在圆锥段(2)的头部,所述圆锥段(2)的尾部与圆柱段(3)的头部相连接。4.根据权利要求1所述一种尾环稳定高速入水航行体,其特征在于,所述航行体的总长为l。5.根据权利要求4所述一种尾环稳定高速入水航行体,其特征在于,所述航行体的总长l与圆柱段(3)的直径d的比值为11~21。6.根据权利要求3所述一种尾环稳定高速入水航行体,其特征在于,所述空化器(1)的直径d0为圆柱段(3)的直径d的1/4~1/3。7.根据权利要求1或2所述一种尾环稳定高速入水航行体,其特征在于,所述尾环(4)的高度h不大于圆柱段(3)的直径d的1/10。8.根据权利要求1所述一种尾环稳定高速入水航行体,其特征在于,所述尾环(4)的高度d为圆柱段(3)的直径d的5倍。
技术总结
本发明提供一种尾环稳定高速入水航行体。所述航行体包括空化器(1)、圆锥段(2)、圆柱段(3)和尾环(4),所述空化器(1)与圆锥段(2)相连接,所述圆锥段(2)与圆柱段(3)相连接,所述圆柱段(3)的尾部套设尾环(4)。本发明为解决现有高速入水航行体冲击载荷大、入水弹道稳定性差的问题。的问题。的问题。
技术研发人员:白瑜亮 王小刚 王帅 张梓晨 单永志 荣思远 吴会菊 吴善华
受保护的技术使用者:哈尔滨工业大学
技术研发日:2021.09.29
技术公布日:2022/1/4