一种基于视觉slam的无人船
技术领域
1.本实用新型属于无人船技术领域,具体涉及到一种基于视觉slam的无人船。
背景技术:
2.无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,在专利号2019109197395的一种基于视觉slam的地图构建的方法、导航系统及装置中,公开了提高移动机器人的定位、避障、自助导航的智能化水平,在运行过程中,通过获取当前位置的视屏图像数据与目标位置的视屏图像数据,识别所述当前位置视屏图像数据与所述目标位置视屏图像数据的点云数据,并获取各所述当前视屏图像数据的点云与所述目标视屏图像数据的点云之间的距离,进而推算出当前位置与目标位置的距离和方位,并构建点云地图,以便于移动机器人的定位、避障、自主导航以及三维重建和人机交互,申请人认为,该技术可以用在无人船上,实现无人船的定位、避障、自主导航以及三维重建和人机交互的技术效果,因此,本实用新型基于无人船的本体,针对采用该系统的装置设置一种便于拆卸的安装方式。
技术实现要素:
3.针对上述问题,本实用新型的主要目的在于设计一种基于视觉slam的无人船,采用可以拆卸的功能块,在功能块需要检修或者出故障的时候,只需将功能块取下,无需整船返修,节约了时间和成本。
4.为了实现上述目的本实用新型采用如下技术方案:
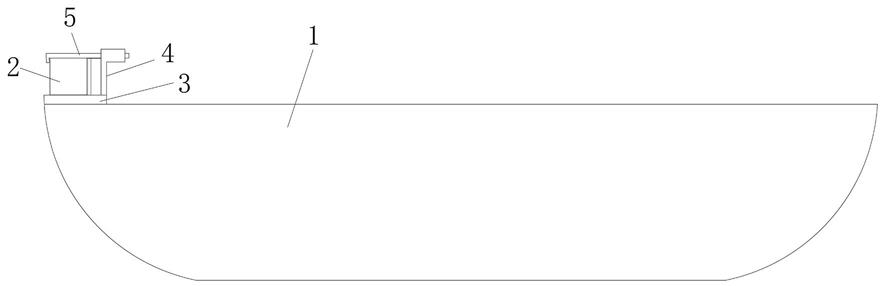
5.一种基于视觉slam的无人船,包括船体和功能块,功能块设置在船体的前端上方。
6.所述的船体前端上沿设置横向的固定板,所述固定板上方远离船体前端的一侧垂直设置定位板,所述定位板上朝向船体前端的一侧竖直设置定位槽,所述的功能块的一侧竖直设置定位柱,定位槽插入定位柱,功能块的上沿与定位槽的上沿平齐,所述的定位板的上方横向设置插槽,插槽的下沿与功能块的上沿平齐,所述插槽内设置定位机构,所述的定位机构包括卡板,卡板插入插槽,卡板配合插槽对功能块进行定位。
7.作为本实用新型进一步的描述,所述的定位机构还包括卡齿,插槽的上板两侧设置开口,所述卡齿设置在插槽的上板的内侧,且平行于插槽的入口。
8.作为本实用新型进一步的描述,所述的卡板设置为l型板,l型板包括一条长边和一条短边,长边与短边的夹角设置为85
°‑
89
°
。
9.作为本实用新型进一步的描述,所述的卡板的长边端部外侧设置若干卡槽,卡板的长边插入插槽,卡槽配合卡齿,卡齿对卡板进行限位。
10.作为本实用新型进一步的描述,所述的卡板的短边内侧设置防滑纹,防滑纹配合功能块的前部。
11.作为本实用新型进一步的描述,所述的功能块的底部中间位置设置定位凹槽,固定板上设置定位凸起,定位凸起与定位凹槽的位置对应,且定位凸起插入定位凹槽。
12.作为本实用新型进一步的描述,所述的定位柱和定位槽至少包括相对应的一组。
13.相对于现有技术,本实用新型的技术效果为:
14.本实用新型提供了一种基于视觉slam的无人船,采用功能块上设置的定位凹槽配合固定板上的定位凸起,定位板上的定位槽配合功能块上的定位柱,以及插槽与卡板的配合,将功能块进行限位在船体上,可以实现功能块的固定和拆卸,在功能块需要检修或者出故障的时候,只需将功能块取下,无需整船返修,节约了时间和成本。
附图说明
15.图1为本实用新型的整体结构视图;
16.图2为本实用新型的功能块与船体固定结构视图;
17.图3为本实用新型的功能块与船体分解结构视图。
18.图中,1.船体,2.功能块,21.定位柱,22.定位凹槽,3.固定板,31.定位凸起,4.定位板,41.定位槽,42.插槽,5.卡板,51.卡槽,52.防滑纹,6.卡齿。
具体实施方式
19.下面结合附图对本实用新型进行详细描述:
20.一种基于视觉slam的无人船,参考图1
‑
3所示,包括船体1和功能块2,功能块2设置在船体1的前端上方。
21.所述的功能块2是集成了专利号2019109197395的构建方法和导航系统,通过获取当前位置的视屏图像数据与目标位置的视屏图像数据,识别所述当前位置视屏图像数据与所述目标位置视屏图像数据的点云数据,并获取各所述当前视屏图像数据的点云与所述目标视屏图像数据的点云之间的距离,进而推算出当前位置与目标位置的距离和方位,并构建点云地图,以便于移动机器人的定位、避障、自主导航以及三维重建和人机交互。
22.所述的船体1前端上沿设置横向的固定板3,所述固定板3上方远离船体1前端的一侧垂直设置定位板4,所述定位板4上朝向船体1前端的一侧竖直设置定位槽41,所述的功能块2的一侧竖直设置定位柱21,定位槽41插入定位柱21,功能块2的上沿与定位槽41的上沿平齐,所述的定位板4的上方横向设置插槽42,插槽42的下沿与功能块2的上沿平齐,所述插槽42内设置定位机构,所述的定位机构包括卡板5,卡板5插入插槽42,卡板5配合插槽42对功能块2进行定位。
23.所述的定位机构还包括卡齿6,插槽42的上板两侧设置开口,所述卡齿6设置在插槽42的上板的内侧,且平行于插槽42的入口。
24.所述的卡板5设置为l型板,l型板包括一条长边和一条短边,长边与短边的夹角设置为85
°‑
89
°
。
25.所述的卡板5的长边端部外侧设置若干卡槽51,卡板5的长边插入插槽42,卡槽51配合卡齿6,卡齿6对卡板5进行限位。
26.所述的卡板5的短边内侧设置防滑纹52,防滑纹52配合功能块2的前部,卡板5对功能块2的上沿进行卡紧固定。
27.所述的功能块2的底部中间位置设置定位凹槽22,固定板3上设置定位凸起31,定位凸起31与定位凹槽22的位置对应,且定位凸起31插入定位凹槽22内。
28.所述的定位柱21和定位槽41至少包括相对应的一组。
29.本实用新型提供了一种基于视觉slam的无人船,采用功能块2上设置的定位凹槽22配合固定板3上的定位凸起31,定位板4上的定位柱21配合功能块2上的定位槽41,以及插槽42与卡板5的配合,将功能块2进行限位在船体1上,可以实现功能块2的固定和拆卸,在功能块2需要检修或者出故障的时候,只需将功能块2取下,无需整船返修,节约了时间和成本。
30.本实用新型的工作原理:此基于视觉slam的无人船在操作过程中,当需要取下功能块2的时候,扳动插槽42的上板,将卡齿6脱出卡板5的卡槽51,将卡板5拉出插槽42,将功能块2沿定位槽41向上取出即可,当需要安装功能块2的时候,功能块2上的定位柱41对准定位槽21插入,功能块2上的定位凹槽22配合定位凸起31,然后将卡板5插入插槽42,卡齿6卡在卡槽51内,卡板5卡紧功能块2即安装完成。
31.以上实施例仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其他修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。