1.本发明涉及深海探测技术领域,具体涉及一种深海智能无缆探测设备的抛绳装置及抛绳方法。
背景技术:
2.随着海底监测平台的不断发展,其工作区域由浅海向深海拓展,对海底沉积物或上覆水进行采样探测。海底环境复杂多变,单一位置往往难以满足采样探测的需求,而海底监测平台的布放方式以有缆布放为主,监测平台布放成本高、位置无法移动,线缆放置不便且会被风浪所损坏,因此具有很大的局限性。
3.目前某些海洋科考团队借助于科学技术的进步,逐步发展深海智能无缆探测设备,将配备有移动电源的深海智能无缆探测设备布放到海底区域进行科研工作,而在进行样品收集和检修时需要将其打捞上来,由于没有缆线的定位,因而需要其他的装置对深海智能无缆探测设备进行定位和捕捉打捞。为此,我们提出了一种深海智能无缆探测设备的抛绳装置及抛绳方法。
技术实现要素:
4.本发明的目的在于解决或至少缓解现有技术中所存在的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:本发明提供一种深海智能无缆探测设备的抛绳装置,包括顶底端不封闭设置的机体外壳,所述机体外壳的底端水平安装有下栅格板,且机体外壳的内腔中设有用于抛射带有打捞绳索的醒目浮漂以便打捞深海智能无缆探测设备的抛绳机构,以及用于启动抛绳机构的断绳机构;所述机体外壳的内腔中还设有用于收纳醒目绳索的绳辊收纳单元。
6.可选地,所述抛绳机构包括通过固定座竖向安装于机体外壳内壁上的抛射筒,抛射筒内置有浮力弹球和压缩后以发射浮力弹球的弹射簧,浮力弹球的首尾端分别安装有打捞绳和固定绳,打捞绳的另一端绕过绳辊收纳单元并固定于深海智能无缆探测设备上,固定绳的另一端穿过断绳机构并与下栅格板相连接。
7.可选地,所述打捞绳包括固定于浮力弹球上的上浮细绳和固定于深海智能无缆探测设备上的打捞粗绳,且上浮细绳与打捞粗绳相连接。
8.可选地,所述抛绳机构还包括有用于压缩弹射簧后以固定浮力弹球的卡扣单元,卡扣单元由若干个固定于浮力弹球侧壁上的挂接柱、竖向开设于抛射筒上且用于容纳挂接柱滑动的竖向槽以及开设于机体外壳对应竖向槽位置的l形槽,且l形槽的水平段用于卡接挂接柱以在浮力弹球上安装固定绳。
9.可选地,所述抛射筒的侧壁顶端水平安装有若干个用于弹射簧顶端固定的锁定栓。
10.可选地,所述断绳机构包括固定于机体外壳内壁上的驱动电机和用于剪断固定绳
的剪切座,且驱动电机的底端通过电机座固定有滑动壳体,滑动壳体内水平滑动插设有滑动杆,且滑动杆的另一端连接至剪切座,滑动杆上套设有伸缩弹簧,滑动杆的底端固定有拨动柱,且拨动柱的另一端贯穿滑动壳体上开设的条形孔并安装有拨动柱,拨动柱上抵触有用于转动后以使拨动柱和滑动杆水平运动的拨动块,且拨动块固定安装于驱动电机的输出端上。
11.可选地,所述剪切座上竖向开设有用于固定绳穿过以剪断的剪切孔位。
12.可选地,所述绳辊收纳单元包括竖向安装于机体外壳内腔中的竖隔板以分隔出绳索收纳空间,且绳索收纳空间的顶端封闭有网格板,绳索收纳空间内设有用于卷绕收纳打捞绳的绳辊。
13.本发明还提供一种上述抛绳装置的抛绳方法,包括如下步骤:s1、将打捞绳索的一端安装于抛绳机构的醒目浮漂上,另一端绕过绳辊收纳单元并固定在深海智能无缆探测设备上,深海智能无缆探测设备投入深海进行探测任务;s2、深海智能无缆探测设备回收时,断绳机构启动,抛绳机构向海面上抛出挂接打捞绳索的醒目浮漂;s3、海上作业人员打捞浮漂后,逐步拉拽打捞绳索并打捞出深海智能无缆探测设备。
14.本发明主要具备以下有益效果:1、本发明的浮力弹球通过弹射簧的弹力释放,安装简单且释放安全稳定,且浮力弹球颜色醒目便于发现,作业人员打捞起浮力弹球后,通过上浮细绳扯出打捞粗绳,打捞粗绳更坚固用于牵引深海智能无缆探测设备,同时抛射装置可便捷的安装于各类深海智能无缆探测设备上,控制简单。
15.2、本发明的深海智能无缆探测设备回收时,断绳机构启动,切断用于固定浮力弹球的固定绳,浮力弹球在弹射簧的压缩弹力下弹射出上浮至海面上,海上作业人员打捞起浮力弹球并依次牵拉出上浮细绳,通过上浮细绳扯出打捞粗绳,打捞粗绳更坚固以牵引深海智能无缆探测设备,通过绳索触发简单,综合弹射簧的压缩弹力,能效比高,降低成本的同时提高了便利性。
附图说明
16.下面将以明确易懂的方式,结合附图说明优选实施方式,对深海智能无缆探测设备的抛绳装置及抛绳方法的上述特性、技术特征、优点及其实现方式予以进一步说明。
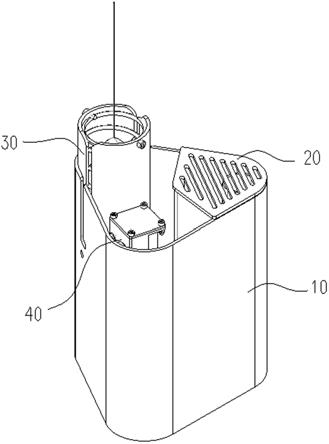
17.图1为本发明立体结构示意图一;图2为本发明立体结构示意图二;图3为本发明结构侧视图;图4为本发明图3中a
‑
a结构示意图;图5为本发明的内部结构立体图;图6为本发明的断绳机构和抛绳机构的组合结构立体图一;图7为本发明的断绳机构和抛绳机构的组合结构立体图二;图8为本发明的断绳机构和抛绳机构的组合结构仰视图。
18.图中:机体外壳10、l形槽101、绳辊收纳单元20、竖隔板201、网格板202、绳辊203、
抛绳机构30、抛射筒301、浮力弹球302、打捞绳303、弹射簧304、固定绳305、竖向槽306、挂接柱307、锁定栓308、固定座309、断绳机构40、电机座401、驱动电机402、剪切座403、剪切孔位4031、拨动块404、拨动柱405、滑动壳体406、条形孔407、滑动杆408、伸缩弹簧409、下栅格板50。
具体实施方式
19.下面结合附图1
‑
8和实施例对本发明进一步说明:实施例1本发明提供一种深海智能无缆探测设备的抛绳装置,包括顶底端不封闭设置的机体外壳10,所述机体外壳10的底端水平安装有下栅格板50,且机体外壳10的内腔中设有用于抛射带有打捞绳索的醒目浮漂以便打捞深海智能无缆探测设备的抛绳机构30,以及用于启动抛绳机构30的断绳机构40;本实施例中,如图1
‑
8所示,所述抛绳机构30包括通过固定座309竖向安装于机体外壳10内壁上的抛射筒301,抛射筒301内置有浮力弹球302和压缩后以发射浮力弹球302的弹射簧304,且抛射筒301的侧壁顶端水平安装有若干个用于弹射簧304顶端固定的锁定栓308,浮力弹球302的首尾端分别安装有打捞绳303和固定绳305,打捞绳303的另一端绕过绳辊收纳单元20并固定于深海智能无缆探测设备上,所述打捞绳303包括固定于浮力弹球302上的上浮细绳和固定于深海智能无缆探测设备上的打捞粗绳,且上浮细绳与打捞粗绳相连接,上浮细绳更轻,浮力弹球302弹出带动上浮细绳飞出,作业人员打捞起浮力弹球302后,通过上浮细绳扯出打捞粗绳,打捞粗绳更坚固用于牵引深海智能无缆探测设备,固定绳305的另一端穿过断绳机构40并与下栅格板50相连接;抛绳机构30还包括有用于压缩弹射簧304后以固定浮力弹球302的卡扣单元,卡扣单元由若干个固定于浮力弹球302侧壁上的挂接柱307、竖向开设于抛射筒301上且用于容纳挂接柱307滑动的竖向槽306以及开设于机体外壳10对应竖向槽306位置的l形槽101,且l形槽101的水平段用于卡接挂接柱307以在浮力弹球302上安装固定绳305;浮力弹球302通过弹射簧304的弹力释放,安装简单且释放安全稳定,同时抛射装置可便捷的安装于各类深海智能无缆探测设备上,控制简单;本实施例中,浮力弹球302为子弹状且为耐压浮力材料,同时浮力弹球302为醒目的红色或黄色,密度小于水,可漂浮与水面,且上浮细绳材质也为高分子聚乙烯,密度与水接近,能漂浮于水面,便于作业人员快速打捞。
20.本实施例中,如图1
‑
8所示,所述断绳机构40包括固定于机体外壳10内壁上的驱动电机402和用于剪断固定绳305的剪切座403,且驱动电机402的底端通过电机座401固定有滑动壳体406,滑动壳体406内水平滑动插设有滑动杆408,且滑动杆408的另一端连接至剪切座403内的剪切刀上,所述剪切座403上竖向开设有用于固定绳305穿过以剪断的剪切孔位4031,滑动杆408上套设有伸缩弹簧409,滑动杆408的底端固定有拨动柱405,且拨动柱405的另一端贯穿滑动壳体406上开设的条形孔407并安装有拨动柱405,拨动柱405上抵触有用于转动后以使拨动柱405和滑动杆408水平运动的拨动块404,且拨动块404固定安装于驱动电机402的输出端上;断绳机构40通过绳索触发简单,综合弹射簧304的压缩弹力,能效比高,无需复杂的弹出机构,降低成本的同时提高了便利性。
21.本实施例中,机体外壳10固定在深海智能无缆探测设备上,将浮力弹球302压入抛射筒301内并通过挂接柱307压入竖向槽306内并卡接于l形槽101的水平段,随后通过固定绳305将浮力弹球302固定在下栅格板50上,并将打捞绳303的上浮细绳端头固定在浮力弹球302上,随后固定绳305放置在绳索收纳空间内,挂接柱307扭动离开l形槽101的水平段,固定绳305拉住浮力弹球302,驱动电机402带动拨动块404转动,进而拨动滑动杆408上的拨动柱405向滑动壳体406内运动,滑动杆408端头的剪切刀水平运动后切断穿过剪切孔位4031的固定绳305,浮力弹球302在弹射簧304的压缩弹力下弹射出,浮力弹球302带动上浮细绳上浮至海面上,海上作业人员打捞起浮力弹球302并依次牵拉出上浮细绳,通过上浮细绳扯出打捞粗绳,打捞粗绳更坚固以用于牵引深海智能无缆探测设备。
22.实施例2本实施例中,如图2
‑
5所示,所述机体外壳10的内腔中还设有用于收纳醒目绳索的绳辊收纳单元20,绳辊收纳单元20包括竖向安装于机体外壳10内腔中的竖隔板201以分隔出绳索收纳空间,且绳索收纳空间的顶端封闭有网格板202,绳索收纳空间内设有用于卷绕收纳打捞绳303的绳辊203,保证打捞绳303的有序整齐卷绕和收纳,便捷的安装于各类深海智能无缆探测设备上。
23.其他未描述结构参照实施例1。
24.本发明的实施例还提供一种上述抛绳装置的抛绳方法,包括如下步骤:s1、机体外壳10固定在深海智能无缆探测设备上,将浮力弹球302压入抛射筒301内并通过挂接柱307压入竖向槽306内并卡接于l形槽101的水平段;s2、通过固定绳305将浮力弹球302固定在下栅格板50上,并将打捞绳303的上浮细绳端头固定在浮力弹球302上,随后固定绳305放置在绳索收纳空间内,挂接柱307扭动离开l形槽101的水平段,固定绳305拉住浮力弹球302;s3、深海智能无缆探测设备投入深海进行探测任务,深海智能无缆探测设备回收时,断绳机构40启动,驱动电机402带动拨动块404转动,进而拨动滑动杆408上的拨动柱405向滑动壳体406内运动,滑动杆408端头的剪切刀水平运动后切断穿过剪切孔位4031的固定绳305,浮力弹球302在弹射簧304的压缩弹力下弹射出;s4、浮力弹球302带动上浮细绳上浮至海面上,海上作业人员打捞起浮力弹球302并依次牵拉出上浮细绳,通过上浮细绳扯出打捞粗绳,打捞粗绳更坚固以牵引深海智能无缆探测设备。
25.最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。