1.本发明涉及海上打捞救援装置,特别涉及一种恶劣海况智能运动补偿打捞救援装置及使用方法。
背景技术:
2.随着船舶设计制造技术及人工智能的发展,人类利用和开发海洋的装备不断增多,海洋活动不断增加,但随之而来的安全事故也不断增多,而大多数海上事故由于恶劣海况造成。目前,国内的海上救助方式主要有:直升机救助、救援船救助等,但只适用于无浪或者低海况,恶劣海况下的救援活动仍然具有很大的危险性,且存在救援效率低、成本高、智能化程度低、救援设备少、危险系数高等问题。
3.因此针对恶劣海况下的救援跟打捞活动,需尽快设计出一种适用于恶劣海况的智能运动补偿打捞救援装备。
技术实现要素:
4.发明目的:本发明的目的是提供一种恶劣海况智能运动补偿打捞救援装置及使用方法,能够解决传统的恶劣海况下救援活动危险性高、救援效率低、成本高、智能化程度低、救援设备少等问题,实现恶劣海况下的各种救援活动。
5.技术方案:本发明所述的一种恶劣海况智能运动补偿打捞救援装置,包括有船体、侧推装置、智能救生圈、六自由度运动补偿平台、打捞救援车、智能救生梯、无人机系统、绞车装置、水下推进器、驱动装置、图像采集装置和控制器,所述图像采集装置用于实时检测水域环境并判断救援位置,包括有位于无人机系统中的图像采集装置二和位于打捞救援车中的图像采集装置一;所述控制器与图像采集装置、驱动装置电气连接;所述驱动装置与打捞救援车、无人机系统、侧推装置、水下推进器和绞车装置电气连接;所述侧推装置便于恶劣环境中的船舶操作,位于船艏的水下部位;所述六自由度运动补偿平台用于保证在恶劣海况下,救援打捞活动安全进行,共两个,前后设置在双体船中间的甲板上,前一个作为打捞救援车的平台,后一个作为无人机系统的平台;所述绞车装置用于拖拉落水汽车或沉船等大型器械,位于船体甲板的后部;所述电机与螺旋桨二通过连接杆转动连接,连接杆在水下旋转,配合侧推装置控制船体的航行与转向用于船体的行驶与转向,位于船体下方艉部。
6.作为优选,所述船体为双体型,设置有救援落水者的固定扶手,所述固定扶手采用防水耐腐蚀材料,表面粗糙,环绕船体外侧一圈,设置在船体的吃水线上方;所述船体内侧下方两侧设有斜撑,以增加船体刚度与稳定性;所述船体两侧对称设置有两个智能救生梯和四个智能救生圈,适用于大量人员落水时的人员自救,提高救援效率。
7.作为优选,所述侧推装置位于船体中船艏的水下部位,在船体两侧对称放置,包括有电机、竖向传动装置和螺旋桨一,所述电机与竖向传动装置连接,提供动力,所述竖向传动装置与螺旋桨一连接,为螺旋桨一提供动力;所述螺旋桨一的浆面所在平面与所在船体的侧面平行。
8.作为优选,所述智能救生圈包括有救生圈、安全扣、挂钩、自动收绳器、尼龙绳和紧固螺丝,所述挂钩固定在船体的舷侧,悬挂有救生圈;所述尼龙绳穿过安全扣将救生圈和自动收绳器相连,所述自动收绳器通过紧固螺丝固定在船体的甲板上。
9.作为优选,所述无人机系统设置在位于船体甲板的中部后侧的六自由度运动补偿平台上,包括有无人机、图像采集装置二、红外热传感器二、语音识别装置和无线充电平台,所述图像采集装置二、红外热传感器二和语音识别装置设置在无人机机身上,无线充电平台设置在六自由度运动补偿平台上,无线充电平台内设置有为无人机自动充电的无线充电装置,无人机不工作时停靠在无线充电平台上进行充电
10.作为优选,所述智能救生梯包括有带轮一、带轮二、定滑轮一、定滑轮二、固定杆一、固定杆二、固定杆三、皮带、固定扶手一、楼梯和固定扶手二;所述带轮一为主动轮,由固定杆二固定在船体的甲板上;所述带轮二由固定杆一固定在船体的舷侧吃水线以下;所述定滑轮一与定滑轮二通过内部的轴,由固定杆三固定在甲板上;所述皮带依次通过带轮一、定滑轮一、带轮二和定滑轮,形成一闭环,所述皮带所成闭环竖直设置在船体的舷侧,跟随定滑轮一顺时针转动,皮带外表面上均匀分布有若干固定扶手一;所述固定扶手一采用具有较号柔韧性的材料,如尼龙绳;所述楼梯的最高点与智能救生梯在甲板上的最高点平齐。
11.作为优选,所述六自由度运动补偿平台包括有六个上虎克铰链、六个下虎克铰链、六个伺服电动缸、上平台、下平台、警报灯、姿态传感器和运动传感器,所述上虎克铰链均匀设置在上平台底部,所述下虎克铰链均匀设置在下平台顶部,上虎克铰链与下虎克铰链之间通过伺服电动缸一一对应连接;所述警报灯、姿态传感器和运动传感器均设置在下平台上。
12.作为优选,所述打捞救援车设置在船体中部前端的六自由度运动补偿平台上,包括有活动底座、动臂、动臂缸、斗杆、斗杆缸、镂空铲斗、铲斗缸、图像采集装置一和红外热传感器一;所述动臂缸、斗杆缸和铲斗缸分别与动臂、斗杆和镂空铲斗相连,所述图像采集装置一位于动臂之上,红外热传感器一位于活动底座上;所述活动底座设置在六自由度运动补偿平台上。
13.作为优选,所述绞车装置设置在船体上甲板的最后方,包括有活动绞车、钢缆和导轨,所述活动绞车设置在导轨上,顺着导轨水平移动;所述钢缆设置在活动绞车上,钢缆顶端设置有挂钩;所述活动绞车上还设置有用于配有减少振动,提高打捞效率的直流无刷电机和刹车装置。
14.一种恶劣海况智能运动补偿打捞救援装置的使用方法,其特征在于:具体包括以下步骤:
15.s1:图像采集装置一识别水域的环境后,自动规划出最佳行驶路径,将所有信号传输至控制器;
16.s2:控制器发送信号至驱动装置,驱动装置驱动水下推进器和侧推装置,联合控制船体的航向与转向,优先驶向大量人群落水点;
17.s3:船体到达落水点后驱动装置驱动打捞救援车、无人机系统、侧推装置、水下推进器和绞车装置,对船体附近进行救援活动;
18.s4:对于船体附近的落水者,智能救生梯开始工作,皮带运行,落水者双手抓住皮带面上的固定扶手一,再用脚踩进下面两个固定扶手一以固定身体保持平衡,智能救生梯
自动将落水者拉到空中,然后落水者通过楼梯走至甲板;
19.s5:位于落水点远处的落水者由无人机系统通过图像采集装置二、红外热传感器二和语音识别装置对救援位置精确定位,再通过无人机定点抛掷智能救生圈,无人机识别到落水者以及抓住救生圈后,自动收绳器开始收绳,同时将落水者拉至船体附近,最终通过智能救生梯实现自救;
20.s6:对于失去意识的或者因孱弱年幼而无法实现自救的落水者,由打捞救援车5实施救援活动,六自由度运动补偿平台保证打捞救援车救援环境的相对平稳,由斗杆上的红外热传感器一对落水者精确定位,然后通过镂空铲斗将落水者打捞上甲板;
21.s7:对于落水物品,小型物品由打捞救援车进行打捞,大型物品由绞车装置进行打捞。
22.有益效果:
23.(1)、本发明提出了一种运动补偿的打捞救援车,适用于恶劣海况下的打捞救援活动,可根据实际海况对船体四周360
°
进行打捞救援活动;
24.(2)、本发明提出了一种智能救生梯结构,适用于大量落水者的人员自救,结构简单,经济性好,适用性强;
25.(3)、本发明通过图像采集装置,可实现智能识别、智能打捞、智能救援一体化的全智能打捞救援活动,适用于危险海况下的无人救援作业,适用性强;
26.(4)、本发明解决了传统的打捞救援船难以解决的恶劣海况救助问题,且救援效率高,安全性可靠;
27.(5)、本发明提出了一种救生圈救援系统,具有定点投掷、精确营救、自动回收的功能,结构简单易操作,经济性好;
28.(6)、本发明提出了一套完善的救援系统,适用于各种救援环境,如白天、黑夜、大量人群救援、近点救援、远点救援等等,适用于各种救援对象,如有能力实现自救的人群、失去意识的人群、自救能力差的老人小孩以及各种需要打捞的物品或私有财产;
29.(7)、本发明解决了传统的打捞救援船智能化程度低、成本高、安全性低、人力消耗严重等问题,适用于开放水域的打捞救援活动,具有广阔的应用前景。
附图说明
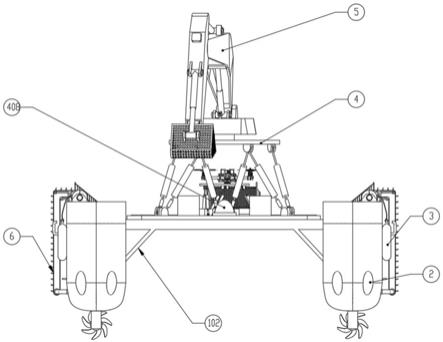
30.图1是本发明的整体结构主视图;
31.图2是本发明的整体结构侧视图;
32.图3是本发明的整体结构俯视图;
33.图4是本发明的整体结构等轴测视图;
34.图5是六自由度运动补偿装置的结构主视图;
35.图6是六自由度运动补偿装置的等轴测视图;
36.图7是智能救生梯的结构主视图;
37.图8是智能救生梯的结构侧视图;
38.图9是智能救生梯的结构俯视图;
39.图10是智能救生梯的结构等轴测视图;
40.图11是智能救生圈的结构主视图;
41.图12是智能救生圈的结构侧视图;
42.图13是智能救生圈的结构等轴测视图;
43.图14是无人机系统的结构主视图;
44.图15是无人机系统的结构等轴测视图。
具体实施方式
45.下面结合附图对本发明的实施方式做进一步地详细描述。
46.如图1到15所示为本发明的一种适用于恶劣海况的智能运动补偿打捞救援装置的结构示意图以及各模块的结构示意图,装置的整体外形为双体船。
47.在本实施例中,该救援装置包括有船体1、侧推装置2、智能救生圈3、六自由度运动补偿平台4、打捞救援车5、智能救生梯6、无人机系统7、绞车装置8、水下推进器9、驱动装置、图像采集装置和控制器,其中图像采集装置用于实时检测水域环境并判断救援位置,包括有位于无人机系统7中的图像采集装置二702和位于打捞救援车5中的图像采集装置一508;控制器与图像采集装置、驱动装置电气连接;驱动装置与打捞救援车5、无人机系统7、侧推装置2、水下推进器9和绞车装置8电气连接;侧推装置2便于恶劣环境中的船舶操作,位于船艏的水下部位;六自由度运动补偿平台4用于保证在恶劣海况下,救援打捞活动安全进行,共两个,前后设置在双体船中间的甲板上,前一个作为打捞救援车5的平台,后一个作为无人机系统7的平台;绞车装置8用于拖拉落水汽车或沉船等大型器械,位于船体1甲板的后部;水下推进器9,用于船体1的行驶与转向,位于船体1下方艉部。
48.在本实施例中,船体1为双体型,设置有救援落水者的固定扶手101,固定扶手101采用防水耐腐蚀材料,表面粗糙,环绕船体1外侧一圈,设置在船体1的吃水线上方;船体1内侧下方两侧设有斜撑102,以增加船体1刚度与稳定性;船体1两侧对称设置有两个智能救生梯6和四个智能救生圈3,适用于大量人员落水时的人员自救,提高救援效率。
49.在本实施例中,侧推装置2位于船体1中船艏的水下部位,在船体1两侧对称放置,包括有电机、竖向传动装置201和螺旋桨一202,电机与竖向传动装置201连接,提供动力,竖向传动装置201与螺旋桨一202连接,为螺旋桨一202提供动力;螺旋桨一202的浆面所在平面与所在船体1的侧面平行。
50.在本实施例中,水下推进器9由连接杆901、螺旋桨二902和电机组成,其中电机与螺旋桨二902通过连接杆901转动连接,连接杆901在水下旋转,调节螺旋桨二902的方向,配合侧推装置2控制船体1的航行与转向。
51.在本实施例中,智能救生圈3包括有救生圈301、安全扣302、挂钩303、自动收绳器304、尼龙绳305和紧固螺丝306,其中挂钩303固定在船体1的舷侧,悬挂有救生圈301;尼龙绳305穿过安全扣302将救生圈301和自动收绳器304相连,自动收绳器304通过十六根紧固螺丝306固定在船体1的甲板上,在使用中时,对于远处的落水者,由无人机701通过抓取和释放安全扣302进行携带及抛掷救生圈301,当落水者抓住救生圈301后,自动收绳器304自动收绳,将落水者拉至船体1附近,然后通过智能救生梯6实现自救。
52.在本实施例中,无人机系统7设置在位于船体1甲板的中部后侧的六自由度运动补偿平台4上,包括有无人机701、图像采集装置二702、红外热传感器二703、语音识别装置705和无线充电平台704,其中图像采集装置二702、红外热传感器二703和语音识别装置705设
置在无人机701机身上,无线充电平台704设置在六自由度运动补偿平台4上,无线充电平台704内设置有为无人机701自动充电的无线充电装置,无人机701不工作时停靠在无线充电平台704上进行充电,在使用时,图像采集装置二702进行信息采集,再由红外热传感器二703和语音识别装置705对救援位置精确定位,对于远处落水者,无人机701可定点抛掷救生圈301,当绞车装置8打捞大型器械时,无人机系统7也可协助放置打捞挂钩。
53.在本实施例中,智能救生梯6包括有带轮一601、带轮二602、定滑轮一603、定滑轮二604、固定杆一605、固定杆二606、固定杆三607、皮带608、固定扶手一609、楼梯610和固定扶手二611;其中带轮一601为主动轮,由固定杆二606固定在船体1的甲板上;带轮二602由固定杆一605固定在船体1的舷侧吃水线以下;定滑轮一603与定滑轮二604通过内部的轴,由固定杆三607固定在船体1的甲板上;皮带608依次通过带轮一601、定滑轮一603、带轮二602和定滑轮二604,形成一闭环,皮带608所成闭环竖直设置在船体1的舷侧,在带轮一601的带动下顺时针转动,皮带608外表面上均匀分布有若干固定扶手一609;固定扶手一609采用具有较号柔韧性的材料,如尼龙绳;楼梯610的最高点与智能救生梯6在甲板上的最高点平齐,在使用时,落水者只需双手抓住皮带608上的固定扶手一609,再用脚踩进下面两个固定扶手一609以固定身体保持平衡,就可直接被智能救生梯6拉上救援装置的船舷,然后通过楼梯610走至甲板,最终实现自救。
54.在本实施例中,六自由度运动补偿平台4包括有六个上虎克铰链401、六个下虎克铰链402、六个伺服电动缸405、上平台403、下平台404、警报灯408、姿态传感器406和运动传感器407,其中上虎克铰链401均匀设置在上平台403底部,所述下虎克铰链402均匀设置在下平台404顶部,上虎克铰链401与下虎克铰链402之间通过伺服电动缸405一一对应连接;警报灯408、姿态传感器406和运动传感器407均设置在下平台404上,在恶劣海况下,六个伺服电动缸405与传感器相配合,通过控制系统,始终保持上平面的相对平稳,有利于打捞救援活动的平稳有序的进行。
55.在本实施例中,打捞救援车5设置在船体1中部前端的六自由度运动补偿平台4上,包括有活动底座501、动臂502、动臂缸503、斗杆504、斗杆缸505、镂空铲斗506、铲斗缸507、图像采集装置一508和红外热传感器一509;其中动臂缸503、斗杆缸505和铲斗缸507分别与动臂502、斗杆504和镂空铲斗506相连,图像采集装置一508位于动臂502之上,红外热传感器一509位于活动底座501上;活动底座501设置在六自由度运动补偿平台4上;在使用时,六自由度运动补偿平台4保证打捞救援环境的相对平稳,图像采集装置一508对环境进行信息采集,确定救援的大概位置,再由红外热传感器一509对救援位置精确定位,动臂缸503、斗杆缸505和铲斗缸507通过控制器分别智能控制动臂502、斗杆504和镂空铲斗506,最终镂空铲斗506打捞救援出对象物体,红外热传感器一509还能检查打捞救援活动是否成功。
56.在本实施例中,绞车装置8设置在船体1上甲板的最后方,包括有活动绞车801、钢缆和导轨802,活动绞车801设置在导轨802上,顺着导轨802水平移动;钢缆设置在活动绞车801上,钢缆顶端设置有挂钩,使用时由无人机701携带钢缆上挂钩并协助挂在最合适的位置,用于拖拉落水汽车或沉船等大型器械;同时活动绞车801上还设置有用于配有减少振动,提高打捞效率的直流无刷电机和刹车装置。
57.在本实施例中,本装置的使用方法包括如下步骤:
58.s1:图像采集装置一508识别水域的环境后,自动规划出最佳行驶路径,将所有信
号传输至控制器;
59.s2:控制器发送信号至驱动装置,驱动装置驱动水下推进器9和侧推装置2,联合控制船体1的航向与转向,优先驶向大量人群落水点;
60.s3:船体1到达落水点后驱动装置驱动打捞救援车5、无人机系统7、侧推装置2、水下推进器9和绞车装置8,对船体1附近进行救援活动;
61.s4:对于船体1附近的落水者,智能救生梯6开始工作,皮带608运行,落水者双手抓住皮带608面上的固定扶手一609,再用脚踩进下面两个固定扶手一609以固定身体保持平衡,智能救生梯6自动将落水者拉到空中,然后落水者通过楼梯610走至甲板;
62.s5:位于落水点远处的落水者由无人机系统7通过图像采集装置二702、红外热传感器二703和语音识别装置705对救援位置精确定位,再通过无人机701定点抛掷智能救生圈3,无人机701识别到落水者以及抓住救生圈301后,自动收绳器304开始收绳,同时将落水者拉至船体1附近,最终通过智能救生梯6实现自救;
63.s6:对于失去意识的或者因孱弱年幼而无法实现自救的落水者,由打捞救援车5实施救援活动,六自由度运动补偿平台4保证打捞救援车5救援环境的相对平稳,由斗杆504上的红外热传感器一509对落水者精确定位,然后通过镂空铲斗506将落水者打捞上甲板;
64.s7:对于落水物品,小型物品由打捞救援车5进行打捞,大型物品由绞车装置8进行打捞。
65.本发明的控制器与图像采集装置、驱动装置相连,驱动装置与打捞救援车、无人机系统、侧推装置、水下推进器相连,通过图像采集装置,可实现智能识别、智能打捞、智能救援一体化的全智能打捞救援活动,适用于危险海况下的无人救援作业,适用性强;针对各种救援环境,有一套完善的救援系统,且简单易操作,经济性好;解决了传统的打捞救援船智能化程度低、成本高、安全性低、人力消耗严重等问题,适用于开放水域的打捞救援活动,且救援效率高,安全性可靠,具有广阔的应用前景。