1.本发明涉及生物监测领域,尤其涉及一种基于无线遥控电动船的福寿螺卵块监测方法。
背景技术:
2.福寿螺是重大危险性农业外来入侵生物之一,它喜食水稻、莲、茭白、芋头、荸荠菜等作物,同时它还可能成为疾病和寄生虫的载体,如其可能携带后广州管圆线虫会引起致命的嗜酸性粒细胞增多性脑膜炎、吸虫能导致皮肤过敏等。福寿螺烹饪方法不当,生食或未熟透食用,会对人类健康产生危害。福寿螺适应环境的生存能力很强,繁殖速度很快,可以迅速扩散于河湖与田野,其食量大且食物种类繁多。因此,需要对福寿螺的数量、分布等信息进行监测,这种监测可为福寿螺的防控提供技术支撑。
3.卵块是福寿螺监测的重要路径。从福寿螺卵的数量、分布基本就可以大致判断出福寿螺成年螺的数量和分布。从卵控制也能更好的对福寿螺进行防控。另外,福寿螺卵块主要分布在河岸、沟渠附近的植物体或石头表面,且颜色呈粉红色,非常利于识别和监测。
4.当前,人们对福寿螺卵块的监测主要是通过眼睛识别和手工调查进行,由于福寿螺常分布在河岸、沟渠等水体附近(有的位于水体下),调查人员需小心谨慎甚至有会掉入水中的风险,而且部分福寿螺卵块过于靠近水体且距离岸边过于遥远,调查人员眼睛很可能看不清楚,这为福寿螺的调查监测带来较大困难,且调查的数据可能存在较大误差或错误数据。
5.此外,目前对福寿螺卵块的监测调查方法主要通过手工记录数量、眼睛估算其大小,对单位面积的卵块数量、大小很难进行准确测量与估算,而且眼睛、手工存在较多主观性误差,不同调查人员的眼睛、手工可能存在较大差异,这为福寿螺卵块调查监测的精度与精确性带来挑战。
技术实现要素:
6.本发明提供了一种基于无线遥控电动船的福寿螺卵块监测方法,解决了人工去现场目测卵块数量和估算东西所存在的危险性高、准确性差的问题。
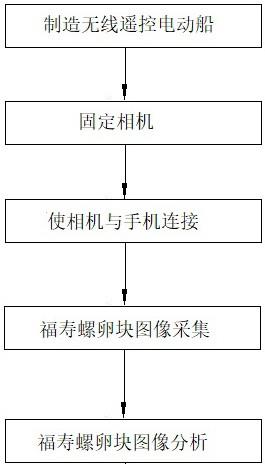
7.以上技术问题是通过以下技术方案解决的:一种基于无线遥控电动船的福寿螺卵块监测方法,其特征在于,第一步、制造无线遥控电动船;第二步、固定相机;在电动船体上安装相机,相机镜头对准福寿螺卵块区域;第三步、使相机与手机连接:设置相机参数,通过wifi或蓝牙与手机端连接,在手机上下载相机app,用手机对相机进行控制,并把相机屏幕显示在手机屏幕上;第四步、福寿螺卵块图像采集:开启电动船、相机,采集福寿螺卵块图像,图像数据存储在相机存储卡里;第五步、福寿螺卵块图像分析:把福寿螺图像数据导入电脑,打开photoshop软件对福寿螺卵块单张图像进行拼接,合成福寿螺卵块区域整体图像;在福寿螺卵块区域整体图像上使用魔棒工具对福寿螺卵块图像进行多点选取,输出福寿螺卵块分布图,从福寿螺卵块分布图上观看卵块的大小和数量。
8.作为优选,所述船体上还设有打捞阻挡在相机拍摄方向上的浮在水上的悬浮物的悬浮物打捞装置,先通过悬浮物打捞装置打捞出悬浮物,然后电动船前进到被打捞过悬浮物的水域同相机对齐。能够在检测的同时对河道进去清洁和防止对相机产生遮挡。
9.作为优选,所述悬浮物打捞装置包括两只沿电动船前后方向分布的打捞箱;所述打捞箱包括下端敞开的箱体、通过水平铰轴铰接在箱体下端的用于封闭箱体下端的过滤板和驱动过滤板关闭到箱体下端的过滤板合拢机构,所述箱体的顶壁上设有出料口,所述出料口对接有树叶收集器,初始状态时两只打捞箱都下端位于水面下上端位于水面上;打捞的过程为:位于后方的打捞箱,使过滤板合拢到箱体下端而封闭住箱体下端、使箱体上升到过滤板高于水面、水从过滤板流出而悬浮物滞留在过滤板上、开启树叶收集器将过滤像内的悬浮物吸走、将打捞箱抬升起后移动到位于前方的打捞箱的前方并以过滤板处于打开的状态下端插入水内而上端位于水上、两只打捞箱一起向后移动打捞箱抬升起后移动到位于前方的打捞箱的前方的过程中位于后方打捞箱前移距离的一半。能够在拍摄前移除拍摄路线上的遮挡物,从而提高拍摄效果,该打捞方式不容易导致水体底部震动大而导致水底物体泛起。
10.作为优选,两只打捞箱之间的间隙宽度小于2毫米,使箱体上升到过滤板高于水面而过滤掉箱体内的悬浮物中的水的过程中,过滤板的下端仍旧位于水内。能够有效防止水滴下产生的涟漪干涉相机对水下部分的拍摄。
11.作为优选,所述导电船上还设有打捞箱整体后移机构,所述打捞箱整体后移机构包括主驱动辊、从驱动辊、环形的驱动带和驱动主驱动辊转动的后移机构部电机,主驱动辊和从驱动辊都穿设在驱动带内而将驱动带张紧,驱动带上设有沿驱动带延伸方向均匀分布的若干棱柱形连接头,所述箱体设有连接耳,所述连接耳设有同棱柱形连接头匹配的多边形连接孔,两个打捞箱通过连接耳上的多边形连接孔套设在相邻的两个棱柱形连接头上而同电动船可拆卸连接在一起;两只打捞箱后移的过程为:后移机构部电机驱动住驱动辊转动,主驱动辊配合从驱动辊驱动驱动带转动,驱动带转动时驱动两只打捞箱后移。能够方便可靠地整体移动打捞箱和保证打捞箱同船体连接的可靠性。
12.作为优选,所述导电船上还设有打捞箱换位结构,所述打捞箱上设有箱体部永磁铁,所述打捞箱换位结构包括立杆、驱动立杆沿电动船前后方向延伸的立杆平移机构、一端连接在立杆上的悬挂臂和连接在悬挂臂另一端上的用于吸附所述箱体部永磁铁而将打捞箱提起的立杆部电磁铁;将打捞箱抬升起后移动到位于前方的打捞箱的前方并以过滤板处于打开的状态下端插入水内而上端位于水上的具体过程为:立杆平移机构移动立杆到立杆部电磁铁同位于后方的打捞箱上的箱体部铁磁体对齐,给立杆部电磁铁供电,立杆部电磁铁吸附箱体部铁磁体而将后方的打捞箱抬升起,立杆平移机构驱动立杆前移到位于后方的打捞箱位于位于前方的打捞箱的前方,立杆部电磁铁失电使得原位于后方的打捞箱下降到下端插入水内而上端位于水上。提供了实现打捞箱前后换位的一种具体技术方案。
13.作为优选,所述悬挂臂套设在所述立杆上,所述悬挂臂还螺纹连接在竖螺纹杆上,竖螺纹杆上设有竖螺纹杆驱动电机,竖螺纹杆驱动电机同立杆固接在一起。使用时,竖螺纹杆驱动电机驱动竖螺纹杆转动,从而使得悬挂臂升降,从而实现打捞箱的升降。能够提高打捞箱升降时的位置可靠性,防止船移动而产生下降后位置不准确的现象,能够降低下降和吸附上时产生的冲击,能够降低立杆部电磁铁吸引力。
14.作为优选,所述立杆平移机构包括沿前后方向滑动连接在船体上的滑块、螺纹连接在滑块上的沿前后方向延伸的横向螺纹杆和驱动横向螺纹杆转动的横向螺纹杆驱动电机,横向螺纹杆转动连接在船体上的连接座上,所述立杆的下端固接在所述滑块上。
15.作为优选,所述过滤板合拢机构包括一端同过滤板连接在一起的拉索、设置在箱体外部的同拉索的另一端连接在一起的绕线机,所述箱体的顶壁上设有过孔,所述拉索穿设在所述过孔内,所述拉索上套设有封闭所述过孔的橡胶堵头,所述橡胶堵头上设有堵头部铁磁体,所述拉索上固接有定位挡块,所述定位挡块上设有永磁铁,所述箱体上设有箱体部电磁铁;过滤板关闭的过程为:绕线机绕起拉索,拉索拉过滤板而得过滤板以水平铰轴为转转动而关闭到封闭住箱体的下端;过滤板关闭后给箱体部电磁铁供电,箱体部电磁铁吸附堵头部铁磁体使得橡胶堵头插入过孔内而封闭住过孔;开启过滤板的过程为:使箱体部电磁铁失电,在永磁铁对堵头部铁磁体的吸附作用下,堵头松开对过孔的密封作用,绕线机放开拉索,在过滤板的重力作用下过滤板以水平铰轴为轴转动而开启。本技术方案能够降低过滤板开关过程中对橡胶堵头的磨损,从而延长橡胶堵头的使用寿命,如果堵头固定在过孔内实现密封,则过滤板开合的过程中,拉索对橡胶堵头的磨损量大。
16.作为优选,所述过孔为位于箱体内部的一段大另一端小的锥形孔,所述橡胶堵头为朝向过孔的一端小另一端大的锥形头,所述过孔沿上下方向延伸,所述箱体内设有换向轮,所述拉索支撑在所述换向轮上,拉索同过孔的孔壁之间断开,拉索位于过孔和换向轮之间的部分处于竖直状态。能够使得橡胶堵头可靠的已经过孔而进行密封。
17.本发明具有下述优点:通过遥控控制进行拍摄,然后通过计算机进行处理,人无需到水体旁边,安全性好,对数量和大小判断的准确性和一致性好,能够提高调查数据准确可靠。
附图说明
18.图1为本发明的流程图;图2为位于后方的打捞箱抬起时电动船的俯视示意图;图3为图2的a—a剖视示意图;图4位图3的c处的局部放大示意图;图5为图2的b—b剖视示意图;图6为位于后方的打捞箱刚移动到位于前方的打捞箱的前方时示意图;图7为位于后方的打捞箱移动到位于前方的打捞箱的前方且下降到位时示意图;图8为两只打捞箱换位完成后一起向后移动了打捞箱抬升起后移动到位于前方的打捞箱的前方的过程中位于后方打捞箱前移距离的一半时的示意图;图9为实施例二中悬挂臂同立杆之间的连接关系示意图。
[0019][0020][0021]
图中:船体37、相机1、打捞箱2、箱体3、水平铰轴4、过滤板5、树叶收集器6、拉索7、绕线机8、过孔9、橡胶堵头10、堵头部铁磁体11、定位挡块12、永磁铁36、箱体部电磁铁13、换向轮14、拉索位于过孔和换向轮之间的部分15、水面16、主驱动辊17、从驱动辊18、驱动带19、后移机构部电机10、棱柱形连接头21、连接耳22、箱体部永磁铁23、立杆24、悬挂臂25、立
杆部电磁铁26、位于后方的打捞箱27、位于前方的打捞箱28、滑槽29、滑块30、横向螺纹杆31、横向螺纹杆驱动电机32、连接座33、竖螺纹杆34、竖螺纹杆驱动电机35。
具体实施方式
[0022]
下面结合附图与实施例对本发明作进一步的说明。
[0023]
参见图1到图8,一种基于无线遥控电动船的福寿螺卵块监测方法,其特征在于,第一步、制造无线遥控电动船;第二步、固定相机;在船体1上安装相机1,相机镜头对准福寿螺卵块区域;第三步、使相机与手机连接:设置相机参数,通过wifi或蓝牙与手机端连接,在手机上下载相机app,用手机对相机进行控制,并把相机屏幕显示在手机屏幕上;第四步、福寿螺卵块图像采集:开启电动船、相机,采集福寿螺卵块图像,图像数据存储在相机存储卡里;第五步、福寿螺卵块图像分析:把福寿螺图像数据导入电脑,打开photoshop软件对福寿螺卵块单张图像进行拼接,合成福寿螺卵块区域整体图像;在福寿螺卵块区域整体图像上使用魔棒工具对福寿螺卵块图像进行多点选取,输出福寿螺卵块分布图,从福寿螺卵块分布图上观看卵块的大小和数量。
[0024]
船体上还设有打捞阻挡在相机拍摄方向上的浮在水上的悬浮物的悬浮物打捞装置,先通过悬浮物打捞装置打捞出悬浮物,然后电动船前进到被打捞过悬浮物的水域同相机对齐、也即橡胶安装在悬浮物打捞装置的后方。悬浮物打捞装置包括两只沿电动船前后方向分布的打捞箱2;打捞箱包括下端敞开的箱体3、通过水平铰轴4铰接在箱体下端的用于封闭箱体下端的过滤板5和驱动过滤板关闭到箱体下端的过滤板合拢机构。箱体的顶壁上设有出料口,出料口对接有树叶收集器6。过滤板合拢机构包括一端同过滤板连接在一起的拉索7、设置在箱体外部的同拉索的另一端连接在一起的绕线机8,箱体的顶壁上设有过孔9,拉索穿设在所述过孔内,拉索上套设有封闭过孔的橡胶堵头10,橡胶堵头上设有堵头部铁磁体11,拉索上固接有定位挡块12,定位挡块上设有永磁铁36。箱体上设有箱体部电磁铁13;箱体部电磁铁位于过孔内构成过孔的孔壁。过滤板关闭的过程为:绕线机绕起拉索,拉索拉过滤板而得过滤板以水平铰轴为转转动而关闭到封闭住箱体的下端;过滤板关闭后给箱体部电磁铁供电,箱体部电磁铁吸附堵头部铁磁体使得橡胶堵头插入过孔内而封闭住过孔;开启过滤板的过程为:使箱体部电磁铁失电,在永磁铁对堵头部铁磁体的吸附作用下,堵头松开对过孔的密封作用,绕线机放开拉索,在过滤板的重力作用下过滤板以水平铰轴为轴转动而开启。过孔为位于箱体内部的一段大另一端小的锥形孔,橡胶堵头为朝向过孔的一端小另一端大的锥形头,过孔沿上下方向延伸,箱体内设有换向轮14,拉索支撑在换向轮上,拉索同过孔的孔壁之间断开,拉索位于过孔和换向轮之间的部分15处于竖直状态。初始状态时两只打捞箱都下端位于水面16下上端位于水面上;打捞的过程为:位于后方的打捞箱,使过滤板合拢到箱体下端而封闭住箱体下端、使箱体上升到过滤板高于水面、水从过滤板流出而悬浮物滞留在过滤板上、开启树叶收集器将过滤像内的悬浮物吸走、将打捞箱抬升起后移动到位于前方的打捞箱的前方并以过滤板处于打开的状态下端插入水内而上端位于水上、两只打捞箱一起向后移动打捞箱抬升起后移动到位于前方的打捞箱的前方的过程中位于后方打捞箱前移距离的一半。两只打捞箱之间的间隙宽度小于2毫米,使箱体上升到过滤板高于水面而过滤掉箱体内的悬浮物中的水的过程中,过滤板的下端仍旧位于水内。导电船上还设有打捞箱整体后移机构,打捞箱整体后移机构包括主驱动辊17、从驱动辊
18、环形的驱动带19和驱动主驱动辊转动的后移机构部电机10,主驱动辊和从驱动辊都穿设在驱动带内而将驱动带张紧,驱动带上设有沿驱动带延伸方向均匀分布的若干棱柱形连接头21,箱体设有连接耳22,连接耳设有同棱柱形连接头匹配的多边形连接孔,两个打捞箱通过连接耳上的多边形连接孔套设在相邻的两个棱柱形连接头上而同电动船可拆卸连接在一起;两只打捞箱后移的过程为:后移机构部电机驱动住驱动辊转动,主驱动辊配合从驱动辊驱动驱动带转动,驱动带转动时驱动两只打捞箱后移、每一次后移的距离为相邻两个棱柱形连接块的距离。导电船上还设有打捞箱换位结构,打捞箱上设有箱体部永磁铁23,打捞箱换位结构包括立杆24、驱动立杆沿电动船前后方向延伸的立杆平移机构、一端连接在立杆上的悬挂臂25和连接在悬挂臂另一端上的用于吸附箱体部永磁铁而将打捞箱提起的立杆部电磁铁26;将打捞箱抬升起后移动到位于前方的打捞箱的前方并以过滤板处于打开的状态下端插入水内而上端位于水上的具体过程为:立杆平移机构移动立杆到立杆部电磁铁同位于后方的打捞箱27上的箱体部铁磁体对齐,给立杆部电磁铁供电,立杆部电磁铁吸附箱体部铁磁体而将后方的打捞箱抬升起,立杆平移机构驱动立杆前移到位于后方的打捞箱位于位于前方的打捞箱28的前方,立杆部电磁铁失电使得原位于后方的打捞箱下降到下端插入水内而上端位于水上。立杆平移机构包括沿前后方向滑动连接在船体上的滑槽29内的滑块30、螺纹连接在滑块上的沿前后方向延伸的横向螺纹杆31和驱动横向螺纹杆转动的横向螺纹杆驱动电机32,横向螺纹杆转动连接在船体上的连接座33上。立杆的下端固接在滑块上。两只打捞箱的前后位置换位后(即前方的打捞箱变成后方的打捞箱、后方的打捞箱变成前方的打捞箱)后,拉杆平衡机构使拉杆后移复位,后续重复上述过程进行打捞即可。
[0025]
实施例二,同以上实施例的不同之处为:参见图9,悬挂臂套设在立杆上,悬挂臂还螺纹连接在竖螺纹杆34上,竖螺纹杆上设有竖螺纹杆驱动电机35,竖螺纹杆驱动电机同立杆固接在一起,竖螺纹杆的下端同滑块转动连接在一起。打捞箱升降时,竖螺纹杆驱动电机驱动竖螺纹杆转动,从而使得悬挂臂升降,从而使得被立杆部电磁铁吸附住的打捞箱升降。