1.本实用新型涉及水域垃圾清理设备技术领域,特别涉及一种水面垃圾打捞船。
背景技术:
2.随着社会经济的高速发展,人们的生活水平有了显著的提高。然而,人们在注重工业和经济发展的同时,却忽略了对环境的保护。近年来,环境问题日益突出,水环境的污染问题也越来越受到社会各界的关注,江流、湖泊、水库上漂浮的垃圾处理问题出现在人们的视野中。
3.目前,市场上水面垃圾的清理主要靠人工打捞为主,但这种清理方式劳动强度较大,工作环境恶劣,效率也十分低下;也有带网兜的机械化打捞船,但这种也是人为操控,而且网兜打捞会加大船前进的阻力。
技术实现要素:
4.本实用新型所要解决的技术问题是:提供一种水面垃圾打捞船,实现无人化、智能化的水面垃圾打捞,提高水面垃圾的清理效率。
5.为了解决上述技术问题,本实用新型采用的技术方案为:一种水面垃圾打捞船,包括船体、打捞传输带、垃圾存储仓、卸料传输带、驱动装置和控制器;
6.所述打捞传输带、所述垃圾存储仓、所述卸料传输带、所述驱动装置和所述控制器均装设于所述船体内,且所述打捞传输带、所述垃圾存储仓和所述卸料传输带依次对应连接,所述驱动装置与所述打捞传输带和所述卸料传输带电连接,所述控制器与所述打捞传输带、所述垃圾存储仓、所述卸料传输带和所述驱动装置通信连接;
7.所述打捞传输带包括挡片和刀片,所述打捞传输带的传输方向的垂直方向上均匀排列分布有所述挡片,每片所述挡片上均安装有所述刀片。
8.进一步地,还包括摄像头和探灯;
9.所述摄像头固定在所述船体外的前端中部;
10.所述探灯位于所述船体外前端且在所述摄像头的两侧各设置有一个。
11.进一步地,还包括超声波传感器,所述超声波传感器的个数为至少九个;
12.所述船体外下方、四周以及四角均至少设置一个所述超声波传感器。
13.进一步地,所述垃圾存储仓还包括存储仓仓门,所述存储仓仓门位于所述垃圾存储仓靠近所述船体尾部的一端;
14.所述打捞传输带具体位于所述垃圾存储仓靠近所述船体头部的一端且向前下方延伸至船体外倾斜设置;
15.所述卸料传输带具体位于所述垃圾存储仓内底部且与所述存储仓仓门垂直连接。
16.进一步地,所述驱动装置包括电机、电池和螺旋桨;
17.所述螺旋桨装设于所述船体外底部靠近所述船体后端的位置,且在所述船体后端下方的两侧均设置有一个;
18.所述电机位于所述船体内且与两个所述螺旋桨连接,用于驱动所述螺旋桨旋转;
19.所述电池安装在所述船体内两侧且与所述电机、所述打捞传输带和所述卸料传输带电连接。
20.进一步地,所述驱动装置还包括太阳能板和充电接收端;
21.所述太阳能板装设于所述船体外顶部上方,且在所述船体顶部上方的两侧各设置一块;
22.所述充电接收端装设于所述船体外尾部上方的位置;
23.所述太阳能板和所述充电接收端均与所述电池电连接。
24.进一步地,还包括机械手;
25.所述机械手在靠近所述船体前端顶部的两侧下方各设置一个;
26.所述机械手可通过电动推杆从所述船体前端顶部的两侧伸出。
27.进一步地,还包括水质检测仪和超声波灭藻仪;
28.所述水质检测仪安装在所述船体外下方;
29.所述超声波灭藻仪安装在所述船体外下方两侧。
30.进一步地,还包括gps定位模块;
31.所述gps定位模块安装在所述船体内顶部。
32.进一步地,所述船体为玻璃钢壳体。
33.本实用新型的有益效果在于:本实用新型提供一种水面垃圾打捞船,在打捞船内集成控制器、驱动装置、打捞传输带、垃圾存储仓和卸料传输带,实现水面垃圾的自动打捞、存储和卸料,同时在打捞传输带上设置挡片便于垃圾的打捞,设置刀片可用于当打捞传输带遇到渔网或钓鱼线等直接进行切断从而避免打捞传输带被卡住而损坏打捞传输带,影响打捞效率,实现了无人化、智能化的水面垃圾打捞,极大提高了水面垃圾的清理效率。
附图说明
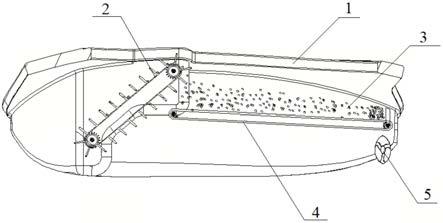
34.图1为一种水面垃圾打捞船的整体结构示意图;
35.图2为一种水面垃圾打捞船的顶部结构图;
36.图3为一种水面垃圾打捞船的局部截面图;
37.图4为一种水面垃圾打捞船的主视图。
38.标号说明:
39.1、船体;2、打捞传输带;3、垃圾存储仓;4、卸料传输带;5、螺旋桨;6、摄像头;7、探灯;8、超声波传感器;9、充电接收端;10、太阳能板;11、挡片;12、存储仓仓门;13、机械手;14、超声波灭藻仪;15、水质检测仪;16、gps定位模块。
具体实施方式
40.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
41.请参照图1至图4,一种水面垃圾打捞船,包括船体、打捞传输带、垃圾存储仓、卸料传输带、驱动装置和控制器;
42.所述打捞传输带、所述垃圾存储仓、所述卸料传输带、所述驱动装置和所述控制器
均装设于所述船体内,且所述打捞传输带、所述垃圾存储仓和所述卸料传输带依次对应连接,所述驱动装置与所述打捞传输带和所述卸料传输带电连接,所述控制器与所述打捞传输带、所述垃圾存储仓、所述卸料传输带和所述驱动装置通信连接;
43.所述打捞传输带包括挡片和刀片,所述打捞传输带的传输方向的垂直方向上均匀排列分布有所述挡片,每片所述挡片上均安装有所述刀片。
44.由上述描述可知,本实用新型的有益效果在于:在打捞船内集成控制器、驱动装置、打捞传输带、垃圾存储仓和卸料传输带,实现水面垃圾的自动打捞、存储和卸料,同时在打捞传输带上设置挡片便于垃圾的打捞,设置刀片可用于当打捞传输带遇到渔网或钓鱼线等直接进行切断从而避免打捞传输带被卡住而损坏打捞传输带,影响打捞效率,实现了无人化、智能化的水面垃圾打捞,极大提高了水面垃圾的清理效率。
45.进一步地,还包括摄像头和探灯;
46.所述摄像头固定在所述船体外的前端中部;
47.所述探灯位于所述船体外前端且在所述摄像头的两侧各设置有一个。
48.由上述描述可知,摄像头可用于为打捞船提供巡检视野和水面垃圾的自动识别,同时在夜晚或光线不足时可采用探灯进行照明,进一步提高垃圾的清理效率。
49.进一步地,还包括超声波传感器,所述超声波传感器的个数为至少九个;
50.所述船体外下方、四周以及四角均至少设置一个所述超声波传感器。
51.由上述描述可知,在船体下方及四周设置超声波传感器,可以起到防搁浅和自动避障的作用。
52.进一步地,所述垃圾存储仓还包括存储仓仓门,所述存储仓仓门位于所述垃圾存储仓靠近所述船体尾部的一端;
53.所述打捞传输带具体位于所述垃圾存储仓靠近所述船体头部的一端且向前下方延伸至船体外倾斜设置;
54.所述卸料传输带具体位于所述垃圾存储仓内底部且与所述存储仓仓门垂直连接。
55.由上述描述可知,水面的垃圾可以通过打捞传输带的带动从一端进入垃圾存储仓,实现自动化的垃圾打捞,而卸料时通过开启垃圾存储仓另一端的存储仓仓门,通过卸料传输带将垃圾卸载到指定的地方,实现垃圾的自动卸料。
56.进一步地,所述驱动装置包括电机、电池和螺旋桨;
57.所述螺旋桨装设于所述船体外底部靠近所述船体后端的位置,且在所述船体后端下方的两侧均设置有一个;
58.所述电机位于所述船体内且与两个所述螺旋桨连接,用于驱动所述螺旋桨旋转;
59.所述电池安装在所述船体内两侧且与所述电机、所述打捞传输带和所述卸料传输带电连接。
60.由上述描述可知,电池为整艘打捞船提供电力,能驱动电机带动螺旋桨为打捞船提供在水面行进的动力。
61.进一步地,所述驱动装置还包括太阳能板和充电接收端;
62.所述太阳能板装设于所述船体外顶部上方,且在所述船体顶部上方的两侧各设置一块;
63.所述充电接收端装设于所述船体外尾部上方的位置;
64.所述太阳能板和所述充电接收端均与所述电池电连接。
65.由上述描述可知,充电接收端可以与外部的充电装置对接,为打捞船的电池进行充电,而太阳能板也能在电池电量不足打捞船返航到外部充电装置处进行充电的情况下为打捞船内的电池进行充电,支持打捞船返航,从而保证打捞船的连续作业;同时太阳能板也能为打捞船的其他模块提供电力,例如探灯等。
66.进一步地,还包括机械手;
67.所述机械手在靠近所述船体前端顶部的两侧下方各设置一个;
68.所述机械手可通过电动推杆从所述船体前端顶部的两侧伸出。
69.由上述描述可知,当打捞船在作业时遇到较大的树枝等大型漂浮物时,打捞传输带无法将其打捞入垃圾存储仓,可通过装设在船体前端顶部两侧的机械手直接对大型漂浮物进行抓取或碾碎再打捞,同时也避免了造成打捞传输带被大型垃圾卡住而损坏,影响打捞工作。
70.进一步地,还包括水质检测仪和超声波灭藻仪;
71.所述水质检测仪安装在所述船体外下方;
72.所述超声波灭藻仪安装在所述船体外下方两侧。
73.由上述描述可知,水质检测仪可用于检测当前水域的水质,将相关数据传输给中控室的电脑中便于工作人员的查看及分析;同时,在船体下还安装有超声波灭藻仪,可以通过独特的超声波技术,选择特定频率发射声波从而使藻类细胞的细胞质与细胞膜脱离,达到灭藻的目的,可以长期有效抑制新的藻类继续生长。
74.进一步地,还包括gps定位模块;
75.所述gps定位模块安装在所述船体内顶部。
76.由上述描述可知,gps定位模块可实时定位打捞船的位置,为打捞船提供自动导航。
77.进一步地,所述船体为玻璃钢壳体。
78.由上述描述可知,采用玻璃钢壳体,能有效保证打捞船的整体强度,延长打捞船的使用寿命。
79.请参照图1及图3,本实用新型的实施例一为:
80.一种水面垃圾打捞船,如图1所示,包括船体1、打捞传输带2、垃圾存储仓3、卸料传输带4和未在图上标出的驱动装置、控制器。
81.其中,在本实施例中,打捞传输带2、垃圾存储仓3、卸料传输带4、驱动装置和控制器均装设于船体1内,且打捞传输带2、垃圾存储仓3和卸料传输带4依次对应连接,驱动装置与打捞传输带2和卸料传输带4电连接,控制器与打捞传输带2、垃圾存储仓3、卸料传输带4和驱动装置通信连接。即在打捞船内集成控制器、驱动装置、打捞传输带2、垃圾存储仓3和卸料传输带4,实现了水面垃圾的自动打捞、存储和卸料。
82.如图3所示,在本实施例中垃圾存储仓3还包括存储仓仓门12,存储仓仓门12位于垃圾存储仓3靠近船体1尾部的一端,卸料传输带4具体位于垃圾存储仓3内底部且与存储仓仓门12垂直连接,当垃圾存储仓3存满垃圾时可通过将存储仓仓门12打开,再通过卸料传输带4将垃圾卸载到指定的地方,实现垃圾的自动卸料;打捞传输带2具体位于垃圾存储仓3靠近船体1头部的一端且向前下方延伸至船体1外倾斜设置,如图3所示,在本实施例中,打捞
传输带2还包括挡片11和未在图上标出的刀片,其中,挡片11为在打捞传输带2的传输方向的垂直方向上均匀排列分布,便于垃圾的打捞,同时,每片挡片11上均安装有刀片,可用于当打捞传输带2遇到渔网或钓鱼线等直接进行切断从而避免打捞传输带2被卡住而损坏打捞传输带2,影响打捞效率。
83.请参照图1、图2及图3,本实用新型的实施例二为:
84.在上述实施例一的基础上,如图1所示,在本实施例中,一种水面垃圾打捞船的驱动装置包括螺旋桨5和未在图上标出的电机和电池。其中,螺旋桨5装设于船体1外底部靠近船体1后端的位置,且在船体1后端下方的两侧均设置有一个;电机位于船体1内且与两个螺旋桨5连接,用于驱动螺旋桨5旋转;电池安装在船体1内两侧且与电机、打捞传输带2和卸料传输带4电连接。
85.如图2所示,驱动装置还包括太阳能板10和充电接收端9。其中,太阳能板10装设于船体1外顶部上方,且在船体1顶部上方的两侧均各设置一块;充电接收端9装设于船体1外尾部上方的位置;太阳能板10和充电接收端9均与电池电连接。可知采用在船体1内安装电池为整艘打捞船提供电力,驱动电机带动螺旋桨5在水面上进行行进,电池可以通过充电接收端9与外部的充电装置对接进行充电,同时太阳能板10也能在电池电量不足打捞船返航到外部充电装置处进行充电的情况下为打捞船内的电池进行充电,支持打捞船返航,从而保证打捞船的连续作业。
86.请参照图2,本实用新型的实施例三为:
87.在上述实施例一或二的基础上,如图2所示,本实施例的一种水面垃圾打捞船还包括摄像头6、探灯7和超声波传感器8。
88.其中,摄像头6固定在船体1外的前端中部,用于为打捞船提供巡检视野和水面垃圾的自动识别;探灯7位于船体1外前端且在摄像头6的两侧各设置有一个,在夜晚或光线不足时可为摄像头6提供照明,进一步提高垃圾的清理效率。
89.其中,超声波传感器8的个数为至少九个,具体为在船体1外下方、四周以及四角均至少设置一个,可以起到防搁浅和自动避障的作用,进一步提高垃圾的清理效率,实现无人化、智能化的垃圾清理。
90.请参照图4,本实用新型的实施例四为:
91.在上述实施例一或二或三的基础上,如图4所示,本实施例的一种水面垃圾打捞船还包括机械手13。其中机械手13在靠近船体1前端顶部的两侧下方各设置一个,且可通过电动推杆从船体1前端顶部的两侧伸出。当打捞船在作业时遇到较大的树枝等大型漂浮物时,打捞传输带2无法将其打捞入垃圾存储仓3,此时可通过装设在船体1前端顶部两侧的机械手13直接对大型漂浮物进行抓取或碾碎再打捞,同时也避免了造成打捞传输带2被大型垃圾卡住而造成损坏,影响打捞工作。
92.如图4所示,打捞船还包括水质检测仪15和超声波灭藻仪14。其中水质检测仪15安装在船体1外下方,可用于检测当前水域的水质,将相关数据传输给中控室的电脑中便于工作人员的查看及分析;超声波灭藻仪14安装在船体1外下方两侧,可以选择特定频率发射声波从而使藻类细胞的细胞质与细胞膜脱离,达到灭藻的目的,且可以长期有效抑制新的藻类继续生长。
93.在本实施例中,打捞船的船体1内顶部还安装有gps定位模块16,用于实时定位打
捞船的位置,且可以为打捞船提供自动导航,进一步提高打捞船的智能化水平。
94.请参照图1至图4,本实用新型的实施例五为:
95.在上述任一实施例的基础上,打捞船的船体1采用玻璃钢材质制作,能有效保证打捞船的整体强度,延长打捞船的使用寿命。
96.综上所述,本实用新型提供的一种水面垃圾打捞船,在打捞船内集成控制器、驱动装置、打捞传输带、垃圾存储仓和卸料传输带,实现水面垃圾的自动打捞、存储和卸料,同时在打捞传输带上设置挡片便于垃圾的打捞,设置刀片可用于当打捞传输带遇到渔网或钓鱼线等直接进行切断从而避免打捞传输带被卡住而损坏打捞传输带,影响打捞效率,实现了无人化、智能化的水面垃圾打捞,极大提高了水面垃圾的清理效率;其中打捞船上还设置有摄像头、超声波传感器、gps定位模块、超声波灭藻仪水质检测仪等功能模块,实现打捞船的自动识别垃圾、自动避障、自动导航、抑制藻类生长及水质分析等,进一步提高了打捞船的智能化水平;同时还采用电池为整艘打捞船提供电力,驱动电机带动螺旋桨为打捞船提供水面行进的动力,采用充电接收端与外部的充电装置对接为电池进行充电,且在船体外设有太阳能板,在电池电量不足打捞船返航到外部充电装置处进行充电的情况下为打捞船内的电池进行充电,支持打捞船返航,从而保证打捞船的连续作业,进一步提高清理效率;并且在打捞船上还设置有机械手,可将大型漂浮物等进行抓取或碾碎再打捞,进一步避免了打捞传输带的损坏,同时采用玻璃钢材质打造打捞船的船体,能有效保证打捞船的整体强度,延长了打捞船的使用寿命。
97.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。