1.本发明涉及水环境监测浮标设备技术领域,尤其是一种用于急流无人浅水区的环境监测平台。
背景技术:
2.雅鲁藏布江无人区,从加拉至扎曲,处于雅鲁藏布江下游,海拔高度1000
‑
2000m;河道长度近100km,多处浅水区,河道内多石,河道流速约5m/s
‑
16m/s;近100km长度内有多个瀑布群,最大瀑布为断层瀑布,高度三十多米,瀑布具体位置不详;河道两侧为高山陡壁,时而发生滑坡、崩塌、堰塞堵江等现象,高山最大高度6000多米;无人区无公网信号,经调研,卫星信号可覆盖无人区顶部,由于两侧高山遮挡,卫星信号是否覆盖河道上未知。河道上空,环境恶劣,无人机无法通行,人员无法到达。
3.现需对该河道水温、水深、流速、浊度、含氧量、ph值、电导率、氨氮、硝酸盐、绿叶素等进行监测,并对河道中藻类及鱼类进行监测,在合适水域取水检验。
4.现有技术中的监测手段主要有水陆空三种手段,可以分无人和有人监测。有人手段为陆路方式,现有装备无法到达,需在山崖下打通栈道才可通行,代价大,时间长,费用高;无人手段有空路和水陆,对于空路,一是因河道上空气流紊乱,无人机容易摔坏,二是河道上空没有信号,无人机飞行距离不足以覆盖整个河道。所以水路是进行上述监测的最经济方式,但现有探测浮标主要用于缓流、能接收卫星信号水域的探测,且尺寸大(一般为球形,直径大于1.2米),吃水深(吃水一般大于1米),因此需要解决如下难题:
5.1)河道急流(速度16m/s),航行过程中需尽量保持航向稳定性,减少自转频率,以确保测量数据、视频有效性;
6.2)河道急流,过瀑布时需保证航态稳定性,航行过程中使平台始终处于立式状态;
7.3)河道中多石,需具有足够的抗冲击、防震能力,保护内部设备安全;
8.4)河道两侧高山遮挡,为无人无信号区,需要读取位置数据,能够在特定水域进行长时间监测、取水样;
9.5)河道多处水浅,航道窄,最窄处约0.7m,最小吃水0.5m,保证监测平台的通行;
10.6)如平台不能及时打捞需具有自毁能力。
技术实现要素:
11.本技术人针对上述现有生产技术中的缺点,提供一种用于急流无人浅水区的环境监测平台,从而携带不同类型专业传感器,专用于上述特定对象水域急流无人浅水区的水环境监测和取样。
12.本发明所采用的技术方案如下:
13.一种用于急流无人浅水区的环境监测平台,包括平板,所述平板的顶部中心位置通过紧固件安装北斗防护罩,所述北斗防护罩的内部安装有北斗终端,所述平板的底部安装有金属防护网,位于金属防护网的外部安装有本体防撞架,位于金属防护网的内部安装
有超小密度浮力材料,同时超小密度浮力材料位于平板的底部,所述超小密度浮力材料的下方设置有水密电子舱,所述水密电子舱的外部设置有对称的水下摄像机,水密电子舱的外侧设置有多个取水装置、ph值传感器和一个锚泊装置,位于水密电子舱的底部安装有高度计,高度计的外部安装高度计防撞架,位于水密电子舱的内部安装有姿态传感器、惯性导航、控制面板、电压转换器和动力蓄电池,水密电子舱外壁面上安装有水密接插件,所述水密电子舱与北斗终端通过水密接插件连通,所述水密电子舱的外壁面上还安装有电控单向阀。
14.其进一步技术方案在于:
15.位于北斗防护罩外部的平板上还安装有北斗保护架,所述北斗保护架的外部包裹有一号防撞橡胶。
16.所述本体防撞架呈框架型结构,并在外部包裹有二号防撞橡胶。
17.所述金属防护网的前半部分及尾部开有均匀分布的透水孔,后半部分侧面位置装有均匀分布的水滴型附体,金属防护网的俯视为船体外形结构。
18.单个水滴型附体的侧面凸起高度为20mm。
19.所述水密电子舱的外壁与本体防撞架之间设置有缓冲橡胶。
20.所述水密电子舱的内部填充有聚氨酯柔性材料。
21.所述锚泊装置采用大抓力锚,锚泊装置通过凯夫拉绳与电机连接。
22.所述电控单向阀通过管路与水密电子舱内部连通。
23.所述北斗防护罩采用peek材料制成。
24.本发明的有益效果如下:
25.(1)本发明集成了特殊线型结构、防撞结构、低密度浮材结构、北斗终端、惯导装置、取水装置、锚泊装置等部件,并通过多台平台组合投放、上游布放、下游打捞、远程控制方式,实现了雅鲁藏布江无人区急流浅水窄航道水域的无人自动化取样和水环境监测作业,提高了作业效率和作业成功率,无需人员现场取样,降低了劳动危险性。
26.(2)本发明尺寸小,最大长度0.68m、最大宽度0.5m、最大吃水0.45m,增加了急流多石区、浅水区、窄航道水域的通行能力。
27.(3)本发明在航行过程中需尽量保持航向稳定性,减少自转频率,以确保测量数据和视频有效性。
28.常规船舶或水下潜艇保持航向稳定性的方法是增大长宽比、增加舵面积或其它大型附体的方式,而本发明对象受到航道尺寸及撞击限制,不能增加大型附体。
29.本发明提出两个措施提高航向稳定性:
30.a)不同于采用球形外形的常规浮标,本发明采用船舶外形,左右对称,前后不对称,在有限的尺寸下,尽量增大长宽比;
31.b)在本发明中横剖面至尾部的线型上增加水滴型附体以增加尾部阻尼,中横剖面前部为光滑线型,当平台受到水流冲击时,形成中横剖面前后受到的水的阻力不一样,可有效提高平台的航向稳定性,水滴型附体的侧面凸起高度为20mm。
32.(4)本发明内部顶端设有特殊的超小密度浮力材料,密度不超过0.02kg/l,以保证重心始终处于浮心之下,稳心高不小于40mm;水面以上北斗防护罩、超小密度浮力材料均设有储备浮力,在水密电子舱破损情况下,依然保证充足浮力;过瀑布时,即使本平台顶部朝
下,也能保证本平台很快扶正,保证了航态稳定性,使平台始终处于立式状态。
33.(5)由于河道流速达16m/s,河道多石,本平台与石头撞击不可避免,需特别注意平台的防撞抗震能力,本发明提出了四个措施来提高防撞、减震能力,措施如下:
34.a)各个防撞架均装有蜂窝状防撞橡胶,经有限元计算分析,同速度撞击,相同质量的蜂窝状橡胶与实心橡胶相比,内部结构受到的最大应力要小17%;
35.b)根据力与质量的关系,质量越大,撞击时受到的应力越大。本发明尽量减小整个平台的重量,金属结构采用7075航空铝合金材料,整个平台质量不大于60kg。
36.c)水密电子舱内部设备(如姿态传感器、惯性导航、控制面板、电压转换器、动力蓄电池)的固定均不采用螺栓等固定连接,而采用柔性固定方式,柔性固定方法为在水密电子舱填充聚氨酯柔性材料,该材料密度低、不导电、阻燃。该材料的增加,有效起到减震效果。。
37.d)水密电子舱与本体防撞架之间的连接增加缓冲橡胶材料,形成了水密电子舱与本体防撞架之间的减少冲击缓冲带。
38.(6)本发明采用北斗终端与惯性导航相结合的方法来存储和传输位置数据。河道两侧高山遮挡、无信号区采用惯导记录位置信息存储至控制面板上的tf存储卡上;当平台漂浮至开阔水域北斗终端能接收卫星信号时,北斗终端采用短报文方式将存储卡上的信息传输至岸基电脑。
39.北斗防护罩采用peek材料制作,既具有金属材料的强度,又能保证北斗信号的传输。
40.(7)本发明设有锚泊装置和取水装置,能够在特定水域进行长时间监测、取水样。
41.锚泊装置采用大抓力锚,与电机之间的连接采用直径3mm的凯夫拉绳,可以保证在有限的空间内足够的锚链长度,锚绳与锚连接平稳过度。由于平台需要抛锚的水域没有卫星信号,通过预先设置的时间及位置信息,自动启动锚泊装置的电机进行抛锚或收锚,锚绳经过锚泊导向装置进行固定,防止大抓力锚晃动。
42.(8)本发明设有电控单向阀,通过管路与水密电子舱连通。通过预先设置一定时间,对单向阀进行控制,当到某个设置的时间时,自动启动电控单项阀,往水密电子舱内注水,舱内设备短路,自毁电子舱内设备,以达到平台自毁数据的能力。
43.(9)采用模块化设计,水密接插件通用,监测仪器高度计、ph值传感器、电导率传感器、水中油传感器、氯离子传感器、浊度传感器、溶解氧传感器、bod传感器、叶绿素传感器、氨氮传感器、硝酸盐传感器、蓝绿藻传感器、toc传感器、cod传感器、离子浓度传感器可互换。
44.(10)平台结构简便、维护方便,可拆成多个部件进行运输,单个部件重量小于25kg,方便运输和安装。
45.(11)本发明专用于高原急流无人区的水环境监测、定点监测和取样,经过特殊改造后,也可应用于其他江河湖海的环境监测。
附图说明
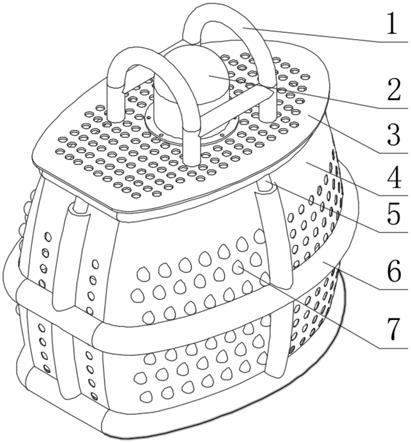
46.图1为本发明的结构示意图。
47.图2为本发明另一视角的结构示意图。
48.图3为本发明的主视图(省略金属防护网)。
49.图4为本发明的内部结构示意图。
50.图5为本发明的侧视图。
51.图6为图5中沿a
‑
a截面的剖视图。
52.图7为本发明水滴型附体的分布图。
53.图8为本发明水滴型附体的截面图。
54.其中:1、一号防撞橡胶;2、北斗防护罩;3、平板;4、金属防护网;5、本体防撞架;6、二号防撞橡胶;7、水滴型附体;8、锚泊导向装置;9、高度计;10、高度计防撞架;11、北斗保护架;12、北斗终端;13、超小密度浮力材料;14、水密电子舱;15、水下摄像机;16、ph值传感器;17、取水装置;18、锚泊装置;19、缓冲橡胶;20、水密接插件;21、姿态传感器;22、聚氨酯柔性材料;23、惯性导航;24、控制面板;25、电压转换器;26、动力蓄电池;27、电控单向阀。
具体实施方式
55.下面结合附图,说明本发明的具体实施方式。
56.如图1
‑
图8所示,本实施例的用于急流无人浅水区的环境监测平台,包括平板3,平板3的顶部中心位置通过紧固件安装北斗防护罩2,北斗防护罩2的内部安装有北斗终端12,平板3的底部安装有金属防护网4,位于金属防护网4的外部安装有本体防撞架5,位于金属防护网4的内部安装有超小密度浮力材料13,同时超小密度浮力材料13位于平板3的底部,超小密度浮力材料13的下方设置有水密电子舱14,水密电子舱14的外部设置有对称的水下摄像机15,水密电子舱14的外侧设置有多个取水装置17、ph值传感器16和一个锚泊装置18,位于水密电子舱14的底部安装有高度计9,高度计9的外部安装高度计防撞架10,位于水密电子舱14的内部安装有姿态传感器21、惯性导航23、控制面板24、电压转换器25和动力蓄电池26,水密电子舱14外壁面上安装有水密接插件20,水密电子舱14与北斗终端12通过水密接插件20连通,水密电子舱14的外壁面上还安装有电控单向阀27。
57.位于北斗防护罩2外部的平板3上还安装有北斗保护架11,北斗保护架11的外部包裹有一号防撞橡胶1。
58.本体防撞架5呈框架型结构,并在外部包裹有二号防撞橡胶6。
59.金属防护网4的前半部分及尾部开有均匀分布的透水孔,后半部分侧面位置装有均匀分布的水滴型附体7,金属防护网4的俯视为船体外形结构。
60.单个水滴型附体7的侧面凸起高度为20mm。
61.水密电子舱14的外壁与本体防撞架5之间设置有缓冲橡胶19。
62.水密电子舱14的内部填充有聚氨酯柔性材料22。
63.锚泊装置18采用大抓力锚,锚泊装置18通过凯夫拉绳与电机连接。
64.电控单向阀27通过管路与水密电子舱14内部连通。
65.北斗防护罩2采用peek材料制成。
66.动力蓄电池26设置有八组。
67.超小密度浮力材料13密度大于0.02kg/l。
68.本发明整体长度小于0.68m、宽度小于0.5m、吃水小于0.5m、稳心高大于40mm。
69.本发明采用北斗终端12与惯性导航23相结合的方法来存储和传输位置信息。无信号区采用惯导记录位置信息存储至tf存储卡上;北斗终端能接收卫星信号时,北斗终端采
用短报文方式将存储卡上的信息传输至岸基电脑。
70.采用三级减震方法,二号防撞橡胶6采用蜂窝状结构,水密电子舱14与本体防撞架5之间的连接增加缓冲橡胶材料19,水密电子舱14内部设备均采用柔性固定方式,填充聚氨酯柔性材料22。
71.设有自动锚泊装置18和自动取水装置17,能够在特定水域进行长时间定点监测、取水作业。锚链采用直径3mm的凯夫拉绳,大抓力锚采用喇叭形锚泊导向装置8进行固定。
72.本发明具体结构和功能如下:
73.主要包括结构系统、电控系统、机械系统和监测仪器。
74.其中结构系统主要包括北斗防护罩2、北斗保护架11、平板3、本体防撞架5、蜂窝型的一号防撞橡胶1和二号防撞橡胶6、水密电子舱14、超小密度浮力材料13、金属防护网4、高度计防撞架10、缓冲橡胶19、聚氨酯柔性材料22。
75.北斗防护罩2由peek材料制成,作用是保护内部设备免受撞击的同时,北斗信号可以穿透通信。
76.蜂窝型的一号防撞橡胶1和二号防撞橡胶6、缓冲橡胶19、聚氨酯柔性材料22的作用是减小平台以及水密电子舱14内部设备受撞击时的冲力。
77.金属防护网4前半部分及尾部开孔透水,以保证平台内部水为流动水;后半部分侧面装有水滴型附体7,以增加阻尼,起保证航向稳定作用。
78.结构系统能保证结构内设备的安全。
79.电控系统主要由北斗终端12、水密接插件20、姿态传感器21、惯性导航23、控制面板24、5v、12v、24v的电压转换器25、动力蓄电池26组成。
80.北斗防护罩2与平板3之间采用密封圈螺栓连接,保证水密,北斗防护罩2内部安装有北斗终端12,北斗终端12数据通过连接到水密电子舱14内的电缆存储到控制面板的存储卡上。
81.电控单向阀27保证了水密电子舱14内数据的定时自毁功能。
82.北斗终端12采用短报文协议传输测量的位置信息和其它数据。
83.惯性导航23在无卫星信号时使用,读取位置信息。
84.动力蓄电池26为18650型动力电池,多组并联,8组串联,24v,分别通过5v、12v和24v电压转换器25为平台中的所有用电设备提供能源。
85.机械系统由取水装置17、锚泊装置18和锚泊导向装置8组成。
86.监测仪器有水面运动防水摄相机和水下摄像机15、高度计9、ph值传感器16、电导率传感器等。
87.本发明的具体操作过程如下:
88.提前设置好抛锚水域的时间和位置信息;
89.将不低于三套本发明平台运至监测水域上游,零件组装好后,打开监测仪器电源、北斗终端12和岸基接收机,每间隔3
‑
5秒顺序依次投放本发明监测平台,组成多平台测量矩阵;
90.可通过平台上的水面运动相机对其它平台相互监视,视屏存储到控制面板的tf卡上;
91.通过岸基接收机连接电脑实时读取平台上北斗发送的短报文信息;
92.待平台漂浮到指定水域时,自动运转抛锚装置电机进行抛锚,然后进行定点长时间监测;
93.待预定的监测时间达到后,电机自动收锚,平台继续漂流并实时监测水环境信息;
94.待平台漂浮到指定水域时,自动接通取水装置17的电源,取水装置17工作取水;
95.开阔水域北斗终端12将监测数据传输至岸基接收机;
96.最后工作人员在下游捞取平台,拆下控制面板上的tf卡,读取监测数据和视频信息,完成一个航次的监测工作。
97.如平台在航行过程中发生卡滞,导致不能按时打捞时,达到预先启动电控单向阀27设置的时间,启动电控单向阀27,水密电子舱内注水,舱内电子设备短路自毁数据。
98.本发明集成了特殊线型结构、防撞结构、低密度浮材结构、北斗终端12、惯导装置、取水装置17、锚泊装置18、电控单向阀27等部件,并通过多台平台组阵测量、上游布放、下游打捞、远程自动控制方式,实现了雅鲁藏布江无人区急流浅水窄航道水域的无人自动化取样和水环境监测作业。
99.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。