1.本实用新型涉及一种服务于海洋环境探测的移动式载体平台,具体涉及一种水面双体自主巡航式海洋探测载体。
背景技术:
2.现代海洋环境探测技术已向立体化体系发展。作为这个体系的最重要和基本的海洋环境自动观测平台技术有了新的突破。海洋环境参数的实时感知对海洋船舶、海洋生物、海洋军事、海洋化工等领域有着重要的影响。
3.海洋探测传感器载体技术主要致力于高可靠性、低功耗、灵活便捷式传感器搭载平台的研发。目前,我国海洋探测传感器载体主要依赖大型勘探性、海洋科考性、海洋地质调查性等大型船舶载体,配以小型化、单一化智能auv、uuv等无人潜器。粗犷式海洋环境探测对深远海环境调查具有普遍性应用,但对于港口、近海、浅海海域的环境参数调查往往无法精细化实现。同时,大型船舶载体探测成本高、数据颗粒度大,高海况下人员安全存在隐患。而高海况下的海洋环境参数恰恰对海洋科研、海洋军事、海洋经济发展具有重要影响。此外,auv、uuv体积较小,搭载传感器类型单一、功能不足,受困于能源补充,无法长期自主探测。
技术实现要素:
4.为克服上述问题,本申请提供一种无人员安全隐患、传感器搭载多样化、太阳能续航的一种水面双体自主巡航式海洋探测载体,可广泛应用于港口、浅海、远海海域,通过北斗卫星终端接收岸基指令进行自主巡航探测。其技术方案为,
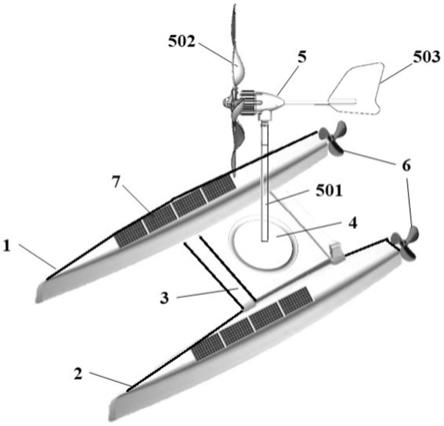
5.一种水面双体自主巡航式海洋探测载体,包括右侧对称片体和左侧对称片体,两者之间设有中间连接桥,所述右侧对称片体和左侧对称片体内部搭载传动机构、温盐深探测传感器,波浪探测传感器,声呐探测传感器;所述右侧对称片体或左侧对称片体内北斗卫星通信终端和主控板,所述北斗卫星通信终端、温盐深探测传感器,波浪探测传感器,声呐探测传感器与主控板进行通信。
6.进一步的,所述中间连接桥上设有转动云台,所述转动云台上设有风向帆,所述风向帆包括转动轴、风叶和尾翼。
7.进一步的,所述右侧对称片体和左侧对称片体上均设有太阳能板,所述太阳能板与蓄电池连接,所述蓄电池位于右侧对称片体或左侧对称片体内。
8.进一步的,所述搭载传动机构包括电动机和传动轴,所述电动机分别安装于右侧对称片体和左侧对称片体内部后端位置,所述电动机通过传动轴与吊舱式螺旋桨连接。
9.进一步的,所述蓄电池通过电源线与电动机相连接,所述蓄电池固定各安装于右侧对称片体和左侧对称片体内部靠前位置。
10.有益效果
11.该载体采用无人值守自主巡航探测模式,通过北斗卫星通信终端接收岸基指令,
避免人员遇险情况发生;采用双体结构,恶劣海况下的动稳性、耐波性良好,作业灵活;可搭载多种类型的海洋探测传感器,同步进行海洋多环境参数探测与数据回传。
附图说明
12.图1为本申请结构示意图;
13.图2为左右两侧对称片体内部布置图;
14.其中,1
‑
右侧片体,2
‑
左侧片体,3
‑
中间连接桥,4
‑
转动云台,5
‑
风向帆,501
‑
转动轴,502
‑
风叶,503
‑
尾翼,6
‑
吊舱式螺旋桨,7
‑
太阳能板,8
‑
蓄电池,9
‑
温盐深探测传感器,10
‑
波浪探测传感器,11
‑
声呐探测传感器,12
‑
北斗卫星通信终端,13
‑
电动机,14
‑
传动轴,15
‑
主控板,16
‑
电源线。
具体实施方式
15.下面结合附图1
‑
2和具体实施例对技术作进一步说明,以助于理解本实用新型的内容。
16.一种水面双体自主巡航式海洋探测载体,包括右侧对称片体1和左侧对称片体2,所述片体采用中间连接桥3进行焊接连接,所述右侧对称片体1和左侧对称片体2内部搭载传动机构(包括电动机13和传动轴14)、温盐深探测传感器9,波浪探测传感器10,声呐探测传感器11。
17.右侧对称片体1内北斗卫星通信终端12,左侧对称片体2内设有主控板15,所述北斗卫星通信终端12、温盐深探测传感器9,波浪探测传感器10,声呐探测传感器11与主控板15进行通信。
18.右侧对称片体1和左侧对称片体2漂浮于水面,提供整体装置所需浮力,各片体上表面平铺4块太阳能板7,太阳能板4通过电源线16与蓄电池8连接,所述蓄电池8固定各安装于两个片体内部靠前位置。
19.蓄电池8通过电源线16与电动机13相连接,提供动力能源,电动机13分别安装于右侧对称片体1和左侧对称片体2内部后端位置,电动机13通过传动轴14与片体外部后端吊舱式螺旋桨6连接,提供整体装置前进动力。
20.吊舱式螺旋桨6可进行360
°
转动,从而改变船舶航向。
21.北斗卫星通信终端12固定安装在右片体1内部,用于数据传输与指令接收,其定位精度为2.5m,测速精度为0.2m/s,授时精度为10纳秒。
22.中间连接桥3上部固定安装转动云台4,转动云台4上部经转动轴501焊接风向帆5主体,风向帆5随云台4同步转动,用于实时监测海面风速。
23.风向帆5由转动轴501,风叶502,尾翼503组成。
24.转动云台4与plc连接,有效转动角度为0至360
°
,手动控制转动精度为0.05
°
,plc控制精度为0.005
°
。
25.当然,上述说明并非对本实用新型的限制,本实用新型也不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也属于本实用新型的保护范围。
技术特征:
1.一种水面双体自主巡航式海洋探测载体,其特征在于,包括右侧对称片体和左侧对称片体,两者之间设有中间连接桥,所述右侧对称片体和左侧对称片体内部搭载传动机构、温盐深探测传感器,波浪探测传感器,声呐探测传感器;所述右侧对称片体或左侧对称片体内北斗卫星通信终端和主控板,所述北斗卫星通信终端、温盐深探测传感器,波浪探测传感器,声呐探测传感器与主控板进行通信。2.根据权利要求1所述的一种水面双体自主巡航式海洋探测载体,其特征在于,所述中间连接桥上设有转动云台,所述转动云台上设有风向帆,所述风向帆包括转动轴、风叶和尾翼。3.根据权利要求1所述的一种水面双体自主巡航式海洋探测载体,其特征在于,所述右侧对称片体和左侧对称片体上均设有太阳能板,所述太阳能板与蓄电池连接,所述蓄电池位于右侧对称片体或左侧对称片体内。4.根据权利要求1所述的一种水面双体自主巡航式海洋探测载体,其特征在于,所述搭载传动机构包括电动机和传动轴,所述电动机分别安装于右侧对称片体和左侧对称片体内部后端位置,所述电动机通过传动轴与吊舱式螺旋桨连接。5.根据权利要求3所述的一种水面双体自主巡航式海洋探测载体,其特征在于,所述蓄电池通过电源线与电动机相连接,所述蓄电池固定各安装于右侧对称片体和左侧对称片体内部靠前位置。
技术总结
本实用新型公开了一种水面双体自主巡航式海洋探测载体,包括左右两侧对称片体,所述片体采用中间连接桥进行焊接连接,所述左右两侧对称片体上部覆盖太阳能电池板,片体内部搭载蓄电池、北斗卫星通信终端、海洋环境探测传感器,片体采用电力吊舱式螺旋桨进行动力推进。其优点在于,该载体采用无人值守自主巡航探测模式,通过北斗卫星通信终端接收岸基指令,避免人员遇险情况发生;采用双体结构,恶劣海况下的动稳性、耐波性良好,作业灵活;可搭载多种类型的海洋探测传感器,同步进行海洋多环境参数探测与数据回传。境参数探测与数据回传。境参数探测与数据回传。
技术研发人员:赵奎 贺保卫 韩兵兵 崔海朋 马志宇 赵巍 刘媛媛 纪海龙
受保护的技术使用者:青岛杰瑞工控技术有限公司
技术研发日:2021.03.18
技术公布日:2021/12/10