1.本实用新型涉及机器人技术领域,尤其涉及仿生型水母机器人。
背景技术:
2.水下机器人是我们探索以及开发海洋所必不可少的重要工具,目前常见的水下机器人主要有鱼类游动型或其它非仿生设备。在实际工作环境中,在海洋动物多且易受惊扰的情况下,传统的机器人容易造成骚动而影响自身的作业。所以有必要发明一种对海水扰动小、移动灵活的仿生型水母机器人。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种对海水扰动小、移动灵活的仿生型水母机器人。
4.技术方案:为实现上述目的,本实用新型的仿生型水母机器人,包括电子舱、摆臂和第一连杆;若干个所述摆臂环向铰接设置在所述电子舱的底部边缘处;所述电子舱上设置有伸缩部件;所述第一连杆一端与伸缩部件的活动端铰接,另一端与摆臂表面铰接;往复活动的所述伸缩部件通过第一连杆带动摆臂摆动;所述电子舱内活动设置有质量块;当所述质量块偏离电子舱的重心移动时,仿生型水母机器人对应变向。
5.进一步地,所述电子舱内部设置有导轨;所述质量块往复滑动设置在所述导轨上;两个所述导轨相互垂直设置。
6.进一步地,所述伸缩部件包括凸轮、罩壳和第二连杆;所述罩壳与所述电子舱的地步连接;所述凸轮回转运行在所述罩壳内部;所述第二连杆一端与第一连杆自由弯折配合,另一端穿过罩壳与凸轮配合连接;转动的所述凸轮带动第一连杆伸缩运动。
7.进一步地,所述伸缩部件还包括复位弹簧;所述复位弹簧套设在第二连杆上;所述复位弹簧一端与第二连杆连接,另一端挤压贴合在罩壳内壁表面。
8.进一步地,所述第二连杆远离凸轮的一端连接设置有安装盘;所述第一连杆与所述安装盘边缘处铰接相连。
9.进一步地,所述电子舱包括减阻罩和底板;所述底板与减阻罩扣合形成密闭空间;所述伸缩部件装配设置在底板上;所述减阻罩的外表面为光滑曲面。
10.进一步地,所述减阻罩为半球体壳。
11.有益效果:本实用新型的仿生型水母机器人,包括电子舱、摆臂和第一连杆;若干个所述摆臂环向铰接设置在所述电子舱的底部边缘处;所述电子舱上设置有伸缩部件;所述第一连杆一端与伸缩部件的活动端铰接,另一端与摆臂表面铰接;往复活动的所述伸缩部件通过第一连杆带动摆臂摆动;所述电子舱内活动设置有质量块;当所述质量块偏离电子舱的重心移动时,仿生型水母机器人对应变向;质量块的功能在于解决机器人转向的问题,质量块自身的移动可以让电子舱的重心偏离,从而让进行中的机器人朝着偏离的方向发生偏转,实现转向;此外,所述电子舱包括减阻罩和底板,减阻罩利用pmma透明度高的特
性,便于在使用、检修时直观掌握内部部件的工作情况。
附图说明
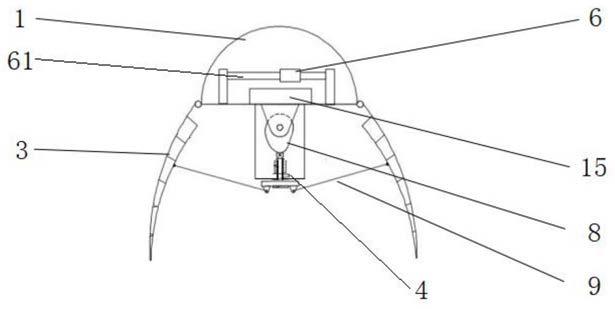
12.图1为仿生型水母机器人整体结构示意图;
13.图2为伸缩部件结构示意图;
14.图3为质量块、导轨安装示意图;
15.图4为电子舱结构示意图。
具体实施方式
16.下面结合附图对本实用新型作更进一步的说明。
17.仿生型水母机器人,如图1所示,包括电子舱1、摆臂3和第一连杆9;若干个所述摆臂3环向铰接设置在所述电子舱1的底部边缘处;所述电子舱1上设置有伸缩部件;所述第一连杆9一端与伸缩部件的活动端铰接,另一端与摆臂3表面铰接;往复活动的所述伸缩部件通过第一连杆9带动摆臂3摆动;所述电子舱1内活动设置有质量块6;当所述质量块6偏离电子舱1的重心移动时,仿生型水母机器人对应变向。
18.电子舱1中设置有探测原件15等设备,具体设备种类可以根据实际的研究任务进行改装,在此不做赘述;当仿生型水母机器人需要移动时,伸缩部件用第一连杆9来同时拉动周围一圈的若干个摆臂3,从而让其同步收缩划水,产生的推力就可以驱动机器人移动了;而质量块6的功能在于解决机器人转向的问题,质量块自身的移动可以让电子舱1的重心偏离,从而让进行中的机器人朝着偏离的方向发生偏转,实现转向。
19.如图3所示,所述电子舱1内部设置有导轨61;所述质量块6往复滑动设置在所述导轨61上;两个所述导轨61相互垂直设置。
20.两个垂直错开的导轨61可以分别控制不同的质量块6移动,从而让重心环向变化,极大提升了转向控制的精度。
21.如图1和图2所示,所述伸缩部件包括凸轮8、罩壳10和第二连杆11;所述罩壳10与所述电子舱1的地步连接;所述凸轮8回转运行在所述罩壳10内部;所述第二连杆11一端与第一连杆9自由弯折配合,另一端穿过罩壳10与凸轮8配合连接;转动的所述凸轮8带动第一连杆9伸缩运动。
22.利用凸轮8的转动,可以驱动第二连杆11往复移动,且转动驱动的方式比直线式伸缩杆之类的设备转向衔接性更好,整个动作会更顺滑,从而减少对于摇臂3的损伤。
23.所述伸缩部件还包括复位弹簧4;所述复位弹簧4套设在第二连杆11上;所述复位弹簧4一端与第二连杆11连接,另一端挤压贴合在罩壳10内壁表面。
24.复位弹簧4的功效类似于圆珠笔壳内笔尖附近的弹簧,可以为第二连杆11回缩提供稳定可靠的推力,从而与凸轮8相互配合,进一步提升第二连杆11往复动作的可靠性。
25.如图2所示,所述第二连杆11远离凸轮8的一端连接设置有安装盘13;所述第一连杆9与所述安装盘13边缘处铰接相连。
26.安装盘13可以将不同的第二连杆11之间的连接点分开,避免相互干涉,有利于驱动力的充分转化。
27.如图4所示,所述电子舱1包括减阻罩12和底板14;所述底板14与减阻罩12扣合形
成密闭空间;所述伸缩部件装配设置在底板14上;所述减阻罩12的外表面为光滑曲面。
28.减阻罩12具体采用pmma作为材料,壁厚优选为10mm,可以利用这种材料透明度高的特性,便于在使用、检修时直观掌握内部部件的工作情况。
29.所述减阻罩12为半球体壳,能够在前进时减少水流阻力,提升续航能力。
30.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.仿生型水母机器人,其特征在于:包括电子舱(1)、摆臂(3)和第一连杆(9);若干个所述摆臂(3)环向铰接设置在所述电子舱(1)的底部边缘处;所述电子舱(1)上设置有伸缩部件;所述第一连杆(9)一端与伸缩部件的活动端铰接,另一端与摆臂(3)表面铰接;往复活动的所述伸缩部件通过第一连杆(9)带动摆臂(3)摆动;所述电子舱(1)内活动设置有质量块(6);当所述质量块(6)偏离电子舱(1)的重心移动时,仿生型水母机器人对应变向。2.根据权利要求1所述的仿生型水母机器人,其特征在于:所述电子舱(1)内部设置有导轨(61);所述质量块(6)往复滑动设置在所述导轨(61)上;两个所述导轨(61)相互垂直设置。3.根据权利要求1所述的仿生型水母机器人,其特征在于:所述伸缩部件包括凸轮(8)、罩壳(10)和第二连杆(11);所述罩壳(10)与所述电子舱(1)的地步连接;所述凸轮(8)回转运行在所述罩壳(10)内部;所述第二连杆(11)一端与第一连杆(9)自由弯折配合,另一端穿过罩壳(10)与凸轮(8)配合连接;转动的所述凸轮(8)带动第一连杆(9)伸缩运动。4.根据权利要求3所述的仿生型水母机器人,其特征在于:所述伸缩部件还包括复位弹簧(4);所述复位弹簧(4)套设在第二连杆(11)上;所述复位弹簧(4)一端与第二连杆(11)连接,另一端挤压贴合在罩壳(10)内壁表面。5.根据权利要求3所述的仿生型水母机器人,其特征在于:所述第二连杆(11)远离凸轮(8)的一端连接设置有安装盘(13);所述第一连杆(9)与所述安装盘(13)边缘处铰接相连。6.根据权利要求1所述的仿生型水母机器人,其特征在于:所述电子舱(1)包括减阻罩(12)和底板(14);所述底板(14)与减阻罩(12)扣合形成密闭空间;所述伸缩部件装配设置在底板(14)上;所述减阻罩(12)的外表面为光滑曲面。7.根据权利要求6所述的仿生型水母机器人,其特征在于:所述减阻罩(12)为半球体壳。
技术总结
本实用新型公开了仿生型水母机器人,包括电子舱、摆臂和第一连杆;若干个摆臂环向铰接设置在电子舱的底部边缘处;电子舱上设置有伸缩部件;第一连杆一端与伸缩部件的活动端铰接,另一端与摆臂表面铰接;往复活动的伸缩部件通过第一连杆带动摆臂摆动;电子舱内活动设置有质量块;当质量块偏离电子舱的重心移动时,仿生型水母机器人对应变向;质量块的功能在于解决机器人转向的问题,质量块自身的移动可以让电子舱的重心偏离,从而让进行中的机器人朝着偏离的方向发生偏转,实现转向。实现转向。实现转向。
技术研发人员:赵梓芬 田军委 苏宇 李沁洋 于鑫培
受保护的技术使用者:西安工业大学
技术研发日:2021.09.14
技术公布日:2022/1/18