1.本实用新型涉及海洋观测技术领域,具体为一种海床基用主箱体,是透明海洋的观测节点。
背景技术:
2.海床基可实现海床基布放点处海洋要素的长期连续测量,是进行海洋要素定点连续观测的重要设备之一。海床基的核心设备:声学多普勒流速剖面仪是用声波换能器作传感器,换能器发射声脉冲,声脉冲通过水体中不均匀分布的泥沙颗粒和浮游生物反射,由换能器接收信号,经测定多普勒频移而测算出流速。声学多普勒流速剖面仪具有能直接测出断面的流速剖面、具有不扰动流场、测验历时短和测速范围大特点。目前被广泛用于海洋、河口的流场结构调查、流速和流量测验。
3.专利文献cn111422328a公开了一种自平衡下降式海床基,导流板环形间隔分布在基座本体上,导流板通过加强筋连接固定在基座本体上,具有防脱网、防淤积、防生物附着和自平衡垂直下降着陆功能,简化了布放步骤,增大了观测成功率,可用于海湾、河口、大陆架、大陆坡海域的海洋要素观测。专利文献cn105539785b公开了一种新型全自动海床基,其包括盘座体、浮体、释放器以及控制系统,结构简单,操作方便,防淤积效果好,自动化程度高,仪器回收率高,方便快捷。由此可见,海床基的部件越来越多,组装海床基越来越耗时,占用的船时费越来越高。
4.1.现有的海床基自动布放或人工布放过程中,海床基受力不均,产生翻转力矩,容易倾覆,可能造成海床基不能正常观测,甚至不能回收。
5.2. 物理海洋学研究对象决定了哪里有风浪就去那里观测,台风来临之际,迎着台风去布置海床基观测台风,可能造成设备或人员的安全事故,非常危险,有时不能完成布放,母船不得不回港躲避风浪。
6.3. 夏季海上天气炎热,风浪大的时候,甲板剧烈摇晃,组装海床基困难,影响组装的质量,高海况的时候甚至不能完成组装,在船上组装海床基的差错影响海床基的质量,甚至可能造成海床基丢失。
7.4. 在母船上组装海床基消耗非常昂贵船时费。
8.因此,有必要研制可在高海况远程布放的海床基及其部件,避免自动布放或人工布放过程中海床基倾覆。
技术实现要素:
9.本实用新型的目的在于提供一种海床基用主箱体,避免自动布放或人工布放过程中海床基倾覆,本实用新型所采用的技术解决方案是:
10.一种海床基用主箱体外部分为上下两部分,上部分为正棱台,下部分为正棱柱,正棱台和正棱柱的多个横截面的正多边形边形的中心的连线定义为海床基的几何对称轴。所述主箱体内部被上下两块隔板分隔为上中下三个舱,所述正棱台内包括上舱和中舱,所述
正棱柱内包含下舱;所述正棱台的八个侧面对称设置有导流孔,中舱顶面设置有向下凸起的导流面,所述导流面向下凸起,海水流经下舱和下隔板上对称布置的孔后,经过中舱所述导流面分流,均分为多股水流从所述导流孔流出所述主箱体。均分的多股水流对下沉中海床基的阻力对称,阻力的合力位于海床基的几何对称轴上。在组装海床基的过程中,通过调配搭载的仪器或浮球的在所述海床基中的安装位置,实现所述海床基的净浮力位于海床基的几何对称轴上。正棱台优选正八棱台和正棱柱优选正八棱柱。
11.所述主箱体和配重之间设置有至少3条侧系缆。每根所述侧系缆至少包含一段海水可以腐蚀的材料制成的细丝,比如一段用砂纸打磨掉镀锌层的镀锌铁丝。所述侧系缆还可以是耐腐蚀材料制成的绳子,所有侧系缆总的拉断力小于海床基的净浮力。浮球设置在正棱台内的上舱之中。
12.所述声学释放器穿过所述上隔板设置在所述下隔板之上,所述声学释放器的轴线与海床基的几何对称轴重合,连接缆设置在海床基的几何对称轴上。所述箱盖使用所述短内六角螺栓连接在所述主箱体上,所述箱盖上安装有观测仪器。所述观测仪器至少包括温盐深仪、所述单点海流计、所述声学多普勒流速剖面仪和所述溶解氧记录仪。
13.与现有技术对比,本实用新型具备以下有益效果:
14.多股均分水流从导流孔流出主箱体,对下沉中海床基的阻力的合力位于海床基的几何对称轴上;通过调配搭载的仪器或浮球的在所述海床基中的安装位置,实现所述海床基的净浮力位于海床基的几何对称轴上;连接缆设置在海床基的几何对称轴上,下降过程中,配重对海床基的牵引力作用在海床基的几何对称轴上;从而减小翻转力矩,达到减小海床基的倾覆机率。导流面分隔沉积物与搭载的仪器,避免搭载的仪器直接接触沉积物污损仪器。
15.由于制造公差和安装误差的存在,可能产生极小的翻转力矩,主箱体与配重之间设置至少3条侧系缆,侧系缆的拉力产生的力矩平衡翻转力矩,避免自动布放或人工布放过程中海床基倾覆,保证布放质量,减小智能海床基丢失机率。
附图说明
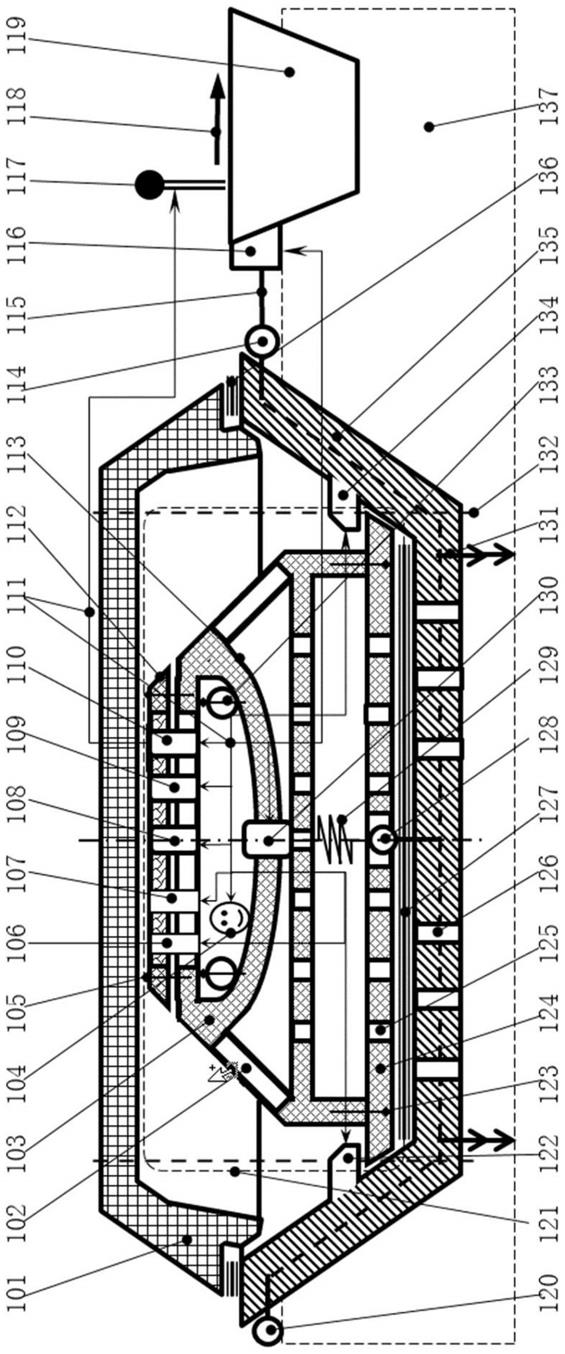
16.图1为远程布放前的海床基示意图;
17.图2为远程布放后的海床基示意图;
18.图3为释放装置结构示意图;
19.图4为进水装置结构示意图;
20.图5为密封板示意图;
21.图6为进水装置为电磁阀阵列的海床基示意图;
22.图7为海床基主箱体的结构示意图;
23.图8为海床基主箱体的结构示意图的俯视图。
24.图中:船舱盖101、侧导流孔102、主箱体103、控制器104、短内六角螺栓105、温盐深仪106、单点海流计107、声学多普勒流速剖面仪108、溶解氧记录仪109、卫星通信装置110、信号线缆111、箱盖112、导流面113、牵引环114、牵引杆115、释放装置116、外置天线117、方向指示线118、无人艇119、后牵引环120、海床基121、左电磁释放器122、长内六角螺栓123、密封板124、上导流孔125、下导流孔126、橡胶密封垫127、连接环128、连接缆129、声学释放
器130、倒刺131、橡胶绳132、浮球133、右电磁释放器134、配重135、橡胶垫136、海水137;
25.侧系缆201、软沉积物层202、硬沉积物层203;
26.长螺栓301、圆盘302、三角挡块303、小弹簧304、连接杆305、大弹簧306、圆柱销307、吸盘式电磁铁308、短螺栓309、机架310、密封垫311、三棱垫块312;
27.密封胶垫400、粗螺栓401、楔形垫块402、细螺栓403、电磁铁404、支架405、铁磁性盘406、耐腐蚀弹簧407、连杆408、挡块409;
28.连接缆孔501、定位孔502;
29.电磁阀601。
30.具体实施方式:
31.实施例1:如图7和图8所示,一种海床基用主箱体,其外部分为上下两部分,上部分为正八棱台,下部分为正八棱柱;所述主箱体103内部被上下两块隔板分隔为上中下三个舱,所述正八棱台内包括上舱和中舱,所述正八棱柱内包含下舱;所述正八棱台的八个侧面对称设置有侧导流孔102,中舱顶面设置有向下凸起的导流面113,也就是所述正八棱台内上隔板的底面设置有导流面113,所述导流面113向下凸起,优选光滑的球面或椭球面。海水流经下舱和下隔板上对称布置的孔后,经过中舱所述导流面113分流,均分为多股水流从所述侧导流孔102流出所述主箱体103,保持所述海床基121下降过程的姿态稳定。另外,通过调配搭载的仪器或浮球的安装位置,实现海床基121的净浮力位于海床基的几何对称轴上,进一步保持所述海床基121下降过程的姿态稳定。同时,导流面113分隔沉积物与搭载的仪器,避免搭载的仪器直接接触沉积物污损仪器。
32.如图1所示,所述主箱体103用于无人艇牵引的远程布放智能海床基,其包括海床基121、声学释放器130、连接缆129和配重135,所述声学释放器130穿过所述上隔板设置在所述下隔板之上,所述声学释放器的轴线与海床基的几何对称轴重合,所述声学释放器130通过所述连接缆129连接设置在所述配重135底部中间位置的连接环128;在回收的时候,所述声学释放器130接收到来自母船它的甲板单元的释放指令,打开锁扣,连接缆129与连接环128分离,海床基121与配重135分离,在自己的净浮力作用下上浮到海面。海床基121由箱盖112、所述主箱体103和所述密封板124构造而成,其内部搭载的仪器和浮球,所述密封板124使用所述长内六角螺栓123连接在所述主箱体103上。海床基121搭载的仪器至少包括温盐深仪106、单点海流计107、声学多普勒流速剖面仪108、溶解氧记录仪109和卫星通信装置110,根据观测目的可以增减若干仪器,搭载的仪器使用摆动支架固定在所述箱盖112上,摆动支架图中未画出,所述箱盖112使用所述短内六角螺栓105连接在所述主箱体103上。回收的时候卫星通信装置110还可以用作信标机,向母船发送海床基121上浮到海面的经纬度坐标。远程布放前,卫星通信装置110一直开机工作;完成远程布放后,控制器104根据ctd106采集的压力数据控制卫星通信装置110关机;回收上浮后,控制器104根据ctd106采集的压力数据控制卫星通信装置110开机。
33.所述配重135为钢筋混凝土制成的平底船壳,钢筋优选使用耐海水腐蚀的不锈钢筋,混凝土优选使用钢纤维混凝土;所述配重135底部设置进水装置,在到达布放位置后,远程布放者远程控制所述进水装置打开,所述配重135进水,智能海床基下沉完成布放;在运输过程中所述配重135内部容纳海床基121及其搭载的仪器,布放后作为锚固定海床基121;所述配重135外形为船壳形状被所述无人艇119牵引的时候阻力较小,所述配重135的平底
便于其平稳坐落在硬沉积物层203上,倒刺131防止配重135水平移动。
34.所述配重135和所述无人艇119之间使用所述释放装置116、所述牵引杆115和牵引环114构造成可释放的连接;优选的,所述配重135前部设置有所述牵引环114,通过所述牵引杆115连接所述释放装置116,所述释放装置116刚性连接在所述无人艇119上;所述配重135一端设置有所述牵引环114,另一端设置有后牵引环120,达到所述配重135下沉的过程中受力对称的技术效果,方向指示线118指示的是无人艇119前进的方向。可释放的连接还可以是释放装置116刚性连接在所述配重135上,牵引环114设置在所述无人艇119上,通过所述牵引杆115连接释放装置116和牵引环114,这样连接不需要对无人艇加装释放装置116,不需要配备专用无人艇,租用即可,图1中未画出,也就是释放装置116、所述牵引杆115和牵引环114变换一种连接方法;此时,所述配重135两端都设置有所述释放装置116,即另一端设置相同的释放装置,达到所述配重135下沉的过程中受力对称的技术效果。
35.所述控制器104使用信号线缆111电信号连接所述卫星通信装置110、所述声学释放器130、所述释放装置116、所述进水装置和搭载的仪器,远程布放者使用所述卫星通信装置传递信号远程控制所述释放装置116和所述进水装置进行布放。所述控制器104设置在所述主箱体103内,所述控制器104包括容纳在水密封外壳中的中央处理器、内存、外存、接口电路和电源,pcb电路板连接中央处理器、内存、外存和接口电路,中央处理器、内存、外存、接口电路分别连接电源,接口电路使用所述信号线缆111电信号连接至所述温盐深仪106、所述单点海流计107、所述声学多普勒流速剖面仪108、所述溶解氧记录仪109、所述卫星通信装置110和所述声学释放器130的接口电路;所述接口电路使用所述信号线缆111连接所述释放装置116的吸盘式电磁铁308的电源继电器;所述接口电路使用所述信号线缆111连接所述配重135的进水装置的电源继电器,信号线缆111与各个仪器和继电器的需要断开的连接采用感应耦合器连接,或在控制器接口电路中设置保护电路,避免接头断开后造成短路损坏电路。吸盘式电磁铁308、电磁铁404和常闭式电磁阀601通过继电器与电源连接,所述信号线缆111传输控制信号控制继电器的闭合或打开,接通或断开它们的电源。
36.如图3所示,所述释放装置116包括长螺栓301、圆盘302、三角挡块303、小弹簧304、连接杆305、大弹簧306、圆柱销307、吸盘式电磁铁308、短螺栓309、机架310和密封减震垫311和三棱垫块312,所述控制器104使用所述信号线缆111连接所述卫星通信装置110和所述吸盘式电磁铁308的电源继电器,通过所述卫星通信装置110接收远程布放者发出的布放指令,根据布放指令所述控制器104生成和发出控制信号给所述吸盘式电磁铁308的电源继电器控制电源接通或断开;所述长螺栓301将所述机架310、所述三棱垫块312、密封减震垫311和所述无人艇119连接在一起,所述吸盘式电磁铁308使用所述短螺栓309连接在所述机架310上;所述连接杆305一端焊接所述三角挡块303,所述小弹簧304套在所述连接杆305上,所述连接杆305穿过所述机架310与所述圆盘302螺纹连接,所述圆盘302选用铁磁性材料制成,所述圆盘302正对所述吸盘式电磁铁308的吸合面;所述圆柱销307套上所述大弹簧306穿入所述机架310的连接孔和所述牵引杆115端部的连接孔之中,所述三角挡块303挡在圆柱销307的后面。
37.所述牵引杆115的连接圈套在所述圆柱销307上,所述圆柱销307将受到所述牵引杆115的拉力传给所述机架310,再传给所述无人艇119。所述吸盘式电磁铁308通电产生吸力,吸引所述圆盘302拉动所述连接杆305和所述三角挡块303,所述三角挡块303离开所述
圆柱销307的背面,所述圆柱销307在所述大弹簧306的弹力作用下脱离所述牵引杆115端部的连接孔,所述配重135与所述无人艇119分离;安装的时候所述吸盘式电磁铁308断电不产生吸力,所述圆柱销307套上所述大弹簧306穿入所述机架310的连接孔和所述牵引杆115端部的连接孔之中,所述三角挡块303在所述小弹簧304弹力作用下挡住所述圆柱销307。本技术中暴露在海水中的零件按海洋仪器设计规范选用耐腐蚀防附着的材料。
38.如图1和图5所示,所述进水装置包括密封板124、橡胶密封垫127、左电磁释放器122和右电磁释放器134,所述密封板124与所述配重135的底部之间设置有所述橡胶密封垫127,所述密封板124压紧在所述橡胶密封垫127上,其两端卡在所述左电磁释放器122和所述右电磁释放器134之下;所述橡胶密封垫127嵌入钢丝强化其强度和刚度,避免持续的密封压力将橡胶从上导流孔125或下导流孔126中挤出,降低密封效果;所述配重135上设置有下导流孔126阵列,所述密封板124上设置有上导流孔125阵列,定位孔502与设置在所述配重135底部的定位销配合,图中未画出定位销,保证所述下导流孔126阵列和所述上导流孔125阵列交错布置,增强橡胶密封垫127的密封效果,保证所述海床基121与所述配重135位置相对固定。所述密封板124中心位置设置有供连接缆129穿过的连接缆孔501。
39.所述控制器104使用所述信号线缆111电信号连接所述卫星通信装置110、所述左电磁释放器122和所述右电磁释放器134的所述电磁铁404的电源继电器;所述控制器104通过所述卫星通信装置110接收远程布放者发出的布放指令,根据布放指令所述控制器104生成和发出控制信号给所述电磁释放器(122、134)的所述电磁铁404的电源继电器,控制其接通或断开电源,所述电磁铁404通电产生吸力,吸引所述铁磁性盘406,拉动所述连杆408和所述挡块409,所述密封板124在所述橡胶密封垫127的弹力作用下脱离所述配重135;海水从下导流孔126涌入所述配重135,所述配重135下沉。
40.所述外置天线117增加接收信号的强度,减低卫星通信装置110功率、提高传输码率和可靠性;所述卫星通信装置110使用感应耦合接头和所述信号线缆111连接所述外置天线117,保证所述外置天线117脱离后,卫星通信装置110使用内置天线继续正常工作。
41.如图4所示,所述电磁释放器(122、134)包括密封垫400、粗螺栓401、楔形垫块402、细螺栓403、电磁铁404、支架405、铁磁性盘406、耐腐蚀弹簧407、连杆408、挡块409和所述信号线缆111,所述粗螺栓401连接所述配重135、所述楔形垫块402、密封垫400和所述支架405为一体,所述细螺栓403将所述电磁铁404固定在所述支架405上,所述连杆408和所述挡块409焊接在一起,所述连杆408穿过所述耐腐蚀弹簧407和所述支架405上的安装孔,螺纹连接所述铁磁性盘406,所述铁磁性盘406正对所述电磁铁404,所述控制器104使用所述信号线缆111连接所述电磁铁404的电源继电器,控制其接通或断开电源。所述控制器104发出控制信号给所述电磁铁404的电源继电器,所述电磁铁404通电产生吸力,吸引所述铁磁性盘406,拉动所述连杆408和所述挡块409,所述密封板124在所述橡胶密封垫127的弹力作用下脱离所述配重135;安装过程中电磁铁404处于断电状态,所述密封板124端部斜面压缩挡块409端部的斜面,所述挡块409压缩所述耐腐蚀弹簧407,所述密封板124上表面与所述挡块409接触,所述挡块409挡住所述密封板124。
42.如图6所示,所述进水装置还可以是设置在每个所述下导流孔126处所述常闭式电磁阀601阵列,所述控制器104使用所述信号线缆111电信号连接所述卫星通信装置110和所述配重135的所述常闭式电磁阀601阵列的电源继电器,所述控制器104通过所述卫星通信
装置110接收远程布放者发出的布放指令,根据布放指令所述控制器104发出控制信号给所述常闭式电磁阀601阵列的继电器接通电源,所述常闭式电磁阀601阵列打开,海水137注入所述配重135。所述常闭式电磁阀601阵列同时打开并保持到智能海床基坐底或常闭式电磁阀601阵列的电源耗尽,对称布置的多进水孔是实现海床基下降过程中保持姿态稳定的前提条件。常闭式电磁阀601阵列代替了实施例1中的由密封板124、橡胶密封垫127、左电磁释放器122和右电磁释放器134构造的所述进水装置。
43.在所述配重135的顶部设置有船舱盖101,在所述配重135和所述船舱盖101之间设置所述橡胶垫136,在所述船舱盖101和所述配重135上捆绑有橡胶绳132。所述船舱盖101由玻璃钢制成,其表面贴反光铝箔,反射太阳辐射,反光铝箔表面喷涂透明清漆,防止海水137腐蚀铝箔。所述船舱盖101起到防晒隔热的作用,防止仪器高温老化,尤其是仪器内部安装的电池,长时间高温缩短电池寿命。
44.无人艇牵引的远程布放智能海床基的布放方法,其步骤如下:
45.s1. 在实验室出海准备的时候,按观测需求选定海床基挂载的仪器,检查设置维护选定的观测仪器,根据预估的布放区域的环境参数设计海床基,选定所述浮球133和所述配重135参数,预制所述配重135;
46.s2. 将各个仪器组装到海床基后,通过调配搭载的仪器或浮球的在所述海床基121中的安装位置,实现所述海床基121的净浮力位于海床基的几何对称轴上,便于保持所述海床基121下降过程的姿态稳定;
47.s3. 所述声学释放器130通过所述连接缆129连接在所述配重135的所述连接环128上;在所述配重135底部铺设所述橡胶密封垫127,将所述密封板124卡在所述左电磁释放器122和所述右电磁释放器134之下,所述信号线缆111连接所述控制器104和所述电磁释放器(122,134)的所述电磁铁404的电源继电器;所述海床基121安装在所述配重135内的填充物中,填充物可以选用木屑或沙石或它们的混合物,填充物图中未画出;
48.s4. 在所述船舱盖101和所述配重135之间铺设橡胶垫136;
49.s5. 使用所述橡胶绳132将所述船舱盖101和所述配重135捆扎在一起;
50.s6. 使用所述释放装置116、所述牵引杆115和所述牵引环114构造成可释放的连接,连接所述配重135和所述无人艇119;使用所述信号线缆111连接所述控制器104和所述释放装置116的吸盘式电磁铁308的电源继电器;
51.s7. 远程布放者与所述无人艇119的自动驾驶仪建立tcp/ip连接,在所述无人艇119的自动驾驶仪中设定海床基布放点的经纬度坐标,所述无人艇119牵引所述配重135到达布放区域后,或者远程布放者在线操控所述无人艇119牵引所述配重135到达布放区域后,远程布放者根据安装在无人艇119上的侧扫声呐回传的实际测量的布放环境信息判定适合布放海床基的时候,远程布放者通过所述卫星通信装置110与所述控制器104建立tcp/ip连接,发出布放指令,根据布放指令发出控制信号经所述信号线缆111传输到所述释放装置116的吸盘式电磁铁308的电源继电器接通电源,释放装置116释放所述牵引杆115;
52.s8. 所述控制器104根据布放指令发出控制信号给所述进水装置的电源继电器接通电源,海水137涌入所述配重135后下沉,所述海床基121在自己的浮力作用下向上顶起所述船舱盖101,拉开所述橡胶绳132,所述船舱盖101与所述配重135分离,侧系缆201展开保持所述海床基121的姿态稳定,随着所述配重135的不断下沉,海床基121在所述配重135的
重力牵引下不断下沉,最后所述配重135静止下来,所述倒刺131插入软沉积物层202和硬沉积物层203交界的沉积物中;海床基121坐在硬沉积物层203上,完成布放。
53.可以在无人艇119上安装远程监控系统监测和记录布放过程,本实用新型所使用的零部件均需要遵守海洋仪器设计规范要求,充分考虑零部件耐腐蚀、防附着和耐水压的要求。
54.实施例2:如图2所示,所述主箱体103和所述配重135之间设置至少3条侧系缆201,所述海床基121的底面与所述配重135顶面平行的状态时,所有侧系缆201处于松弛状态,连接缆129提供所述配重135牵引所述海床基121向下运动的力,也就是侧系缆201的长度比图2中所示的长度长百分之一至百分之二,下降过程中受到海流的扰动,当所述海床基121相对于所述配重135发生倾斜,侧系缆201其中的一条或几条才受到拉力,进一步保持海床基121下降过程的姿态稳定。每根侧系缆201至少包含一段海水可以腐蚀的材料制成的细丝,如用砂纸打磨掉镀锌层的镀锌铁丝,布放在海水中,镀锌铁丝被海水腐蚀,回收海床基的时候镀锌铁丝已经不能承受拉力。例如剪断一根塑料绳,在断口处连接一段直径为一毫米的打磨掉镀锌层的镀锌铁丝制成侧系缆201,这是因为塑料绳柔韧性较好,去除镀锌层的铁丝容易被海水腐蚀,达到延时断开侧系缆201的技术效果。侧系缆201还可以是耐腐蚀材料制成的绳子,此时所有侧系缆201总的拉断力小于海床基121的净浮力,优选的,总的拉断力等于0.2至0.3倍海床基121的净浮力,确保回收海床基的时候,海床基121的净浮力拉断所有侧系缆201。
55.总之,本实用新型虽然列举了上述优选实施方式,虽然本领域的技术人员可以进行各种变化和改型,除非这样的变化和改型偏离了本实用新型的范围,否则都应该包括在本实用新型的保护范围内。