1.本实用新型涉及一种潜水器,特别涉及一种基于浮沉子原理和温控气压法的潜水器。
背景技术:
2.随着海洋资源的不断开发,潜水器的技术越来越成熟,然而,现有的潜水器主要采用无动力方式进行下潜和上浮,第一种是通过加载下潜压铁和抛除上浮压铁的方式实现快速下潜和上浮,由于潜水器的组成和结构各不相同,航行的水域的环境也不相同,精确计算不同航行深度配平量很困难,需要在实验前针对不同的下潜深度进行配平,导致无人艇在下潜和上浮的实施周期长,耗费的成本也较大。第二种是抽水/排水法的原理,但是这种装置的机构体积较大,结构复杂,而且在深水区排水时要克服高水压做工,耗费的成本较高。因此针对无人艇下潜和上浮的装置存在的问题,希望能设计一种更为简单低成本且能够精确控制的潜水器。
技术实现要素:
3.为了解决上述技术问题,本实用新型提供一种基于浮沉子原理和温控气压法的潜水器,包括壳体、控制系统、电池、配重、气动门、气动门控制器、信号发射接收器、湿度传感器、姿态传感器、温度控制器和螺旋桨;所述的壳体为蛋壳形,壳体内上部设有空气舱,下部设有控制舱,壳体底部设有进水口,空气舱与控制舱之间设有隔板,隔板中部设有向下的通水管,空气舱通过通水管与进水口连通;控制系统和电池分别设在控制舱内,配重设在控制舱底部;进水口处设有气动门,气动门与气动门控制器相连,气动门控制器设在控制舱内,通过线路与控制系统相连;信号发射接收器、湿度传感器和姿态传感器设在壳体顶部,通过线路与控制系统相连;温度控制器设在空气舱内,通过线路与控制系统相连,所述的温度控制器包括温控板、内部温度传感器;壳体外表面周圈设有数个均匀分布的螺旋桨。
4.壳体外表面沿壳体中部周圈设有四组螺旋桨,四组螺旋桨呈十字形均匀分布,每组螺旋桨分别包括螺旋桨电机和螺旋桨叶片,螺旋桨电机通过线路与控制系统相连,螺旋桨叶片与螺旋桨电机的输出轴相连。
5.所述的控制舱内从上到下依次设有电池电路舱和气动配重舱,电池和控制系统设在电池电路舱内,气动门控制器和配重设在气动配重舱内;电池电路舱对应的壳体上设有电路舱门,气动配重舱对应的壳体上设有气动配重舱门。
6.所述的控制系统包括主控制电路和副控制电路,主控制电路包括主单片机,主单片机与信号发射接收器、温度控制器和姿态传感器相连;副控制电路包括副单片机,副单片机与科研系统相连。
7.所述的科研系统包括搭载机架、顶部环形摄像头、底部环形摄像头、照明灯、外部温度传感器、水质检测器和设备通用接口,所述的搭载机架设在壳体底部,环绕进水口设置,顶部环形摄像头设在壳体顶部,底部环形摄像头、照明灯、外部温度传感器、水质检测器
和设备通用接口分别设在搭载机架上,并分别通过线路与控制系统相连。
8.所述的空气舱对应的壳体上设有空气舱门。
9.本实用新型的工作原理:
10.本实用新型是利用浮沉子原理设计的潜水器,浮沉子是利用阿基米德原理,改变浮力大小从而实现在液体中的升降。部分装水的容器倒置在水(液体)中会存在一个临界深度,临界深度是指容器稳定悬浮时,容器内部的液面所处深度,容器内液面高于这个深度,容器会下沉,低于这个深度,容器则会上浮。
11.在容器内液面恰好等于临界深度时,容器内液面的上下压强相等,列出如下公式:
12.p=ρgh
c
+p
w
ꢀꢀꢀ
(1)
13.其中,p为此时容器内气体的压强,ρ为水(液体)的密度,g为重力加速度,h
c
为临界深度,p
w
为水面上方的压强,通常为大气压。
14.当容器处于稳定悬浮时,可看作容器外壁+容器内部气体的平均密度等于水(液体)的密度,列出如下公式:
[0015][0016]
其中,ρ为水(液体)的密度,m为容器与内部气体的总质量,v
b
为容器外壁的体积,v为此时容器内部气体的体积。
[0017]
有修正后的理想气体状态方程如下:
[0018]
pv=znrt
ꢀꢀꢀ
(3)
[0019]
其中,p为此时容器内气体的压强,v为此时容器内部气体的体积,z为压缩因子,由实验测得/查表得到,取值1.0
±
0.8,n为容器内气体物质的量,r为理想气体常数,取值8.314,t为气体的温度。
[0020]
将(2)、(3)式带入(1)式,则有:
[0021][0022]
同时,根据理想气体状态方程可得:
[0023][0024]
应用到本实用新型则:h
c
为潜水器临界深度,n为潜水器内气体物质的量,v
w
为向空气舱内注入水的体积,z为压缩因子,由实验测得/查表得到,取值1.0
±
0.8,r为理想气体常数,取值8.314,t为气体的温度,m为潜水器与内部气体的总质量(空气质量可忽略不计),g为重力加速度,ρ为水(液体)的密度,v
b
为潜水器壳体(关闭气动门后潜水器总体积减去空气舱和通水管容积)的体积,v
r
为空气舱和通水管的容积,p
w
为水面上方的压强,通常为大气压。
[0025]
当控制系统控制温度控制器中的温控板加热使空气舱内气体温度升高,气体体积会增大,将空气舱内的水从壳体底部的进水口排出;当控制系统控制温度控制器中的温控板降温使空气舱内气体温度降低,气体体积会减小,水会从壳体底部的进水口吸进空气舱。当潜水器处于平衡稳定的悬浮状态时,气动控制器控制气动门关闭进水口,使空气舱内水压保持稳定,潜水器即可在该水域深度内进行稳定悬浮作业。螺旋桨可以调整潜水器在水平方向上的运动。
[0026]
易知,气体物质的量、温度以及容器质量体积是潜水器的重要参数,因此,在潜水器的质量体积一定时,可以通过改变在潜水器中充入气体的量以及气体温度来控制进入潜水器内的水量,进而改变潜水器的临界深度,根据潜水器不同的临界深度使潜水器达到上浮和下沉的目的。
[0027]
本实用新型的有益效果:
[0028]
本实用新型提供的潜水器易于操作,能够在水域中指定深度稳定悬浮,可以根据实际测量深度的需要设计不同的结构,添加不同的科研模块对装置进行调整,使得该装置更加符合实际需求,减少了能量损耗和臃肿的结构,使成本大大降低。本实用新型将浮沉子最新研究成果应用到潜水器装置中,借助浮沉子原理和温控气压法实现对潜水器浮潜控制,通过简单有效的负反馈算法机制消除了海洋中不稳定暗流以及洋流兴波等对潜水器的影响,实现对潜水器潜水深度和工作区域的精确控制。
附图说明
[0029]
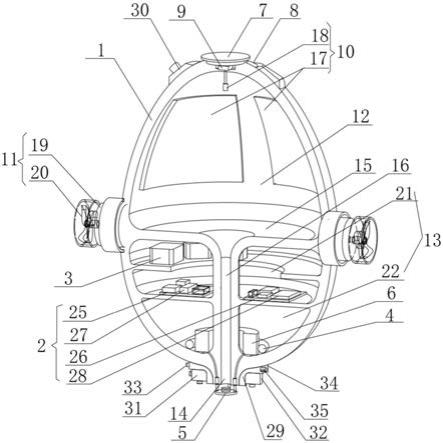
图1为本实用新型内部结构示意图;
[0030]
图2为本实用新型壳体结构示意图;
[0031]
1、壳体 2、控制系统 3、电池 4、配重 5、气动门 6、气动门控制器 7、信号发射接收器 8、湿度传感器 9、姿态传感器 10、温度控制器 11、螺旋桨 12、空气舱 13、控制舱 14、进水口 15、隔板 16、通水管 17、温控板 18、内部温度传感器 19、螺旋桨电机 20、螺旋桨叶片 21、电池电路舱 22、气动配重舱 23、电路舱门 24、气动配重舱门 25、主控制电路 26、副控制电路 27、主单片机 28、副单片机 29、搭载机架 30、顶部环形摄像头 31、底部环形摄像头 32、照明灯 33、外部温度传感器 34、水质检测器 35、设备通用接口 36、空气舱门。
具体实施方式
[0032]
请参阅图1
‑
2所示:
[0033]
本实用新型提供一种基于浮沉子原理和温控气压法的潜水器,包括壳体1、控制系统2、电池3、配重4、气动门5、气动门控制器6、信号发射接收器7、湿度传感器8、姿态传感器9、温度控制器10和螺旋桨11;所述的壳体1为蛋壳形,壳体1内上部设有空气舱12,下部设有控制舱13,壳体1底部设有进水口14,空气舱12与控制舱13之间设有隔板15,隔板15中部设有向下的通水管16,空气舱12通过通水管16与进水口14连通;控制系统2和电池3分别设在控制舱13内,控制系统2与电池3相连,配重4设在控制舱13底部;进水口14处设有气动门5,气动门5与气动门控制器6相连,气动门控制器6设在控制舱13内,通过线路与控制系统2相连;信号发射接收器7、湿度传感器8和姿态传感器9设在壳体1顶部,通过线路与控制系统2相连,姿态传感器9位于壳体内部;温度控制器10设在空气舱12内,通过线路与控制系统2相连,所述的温度控制器10包括温控板17和内部温度传感器18,温控板17设在空气舱12内壁,受控制系统2控制对空气舱12内的气体进行升温或降温,内部温度传感器18用于检测空气舱12内气体温度,并传输给控制系统2;壳体1外表面沿壳体中部周圈设有四组螺旋桨11,四组螺旋桨11呈十字形均匀分布,每组螺旋桨11分别包括螺旋桨电机19和螺旋桨叶片20,螺旋桨电机19设在壳体1表面的螺旋桨安装槽内,通过线路与控制系统2相连,螺旋桨叶片20
与螺旋桨电机19的输出轴相连。所述的空气舱12对应的壳体1上设有空气舱门36。电池为整个系统提供电能。
[0034]
所述的控制舱13内从上到下依次设有电池电路舱21和气动配重舱22,电池电路舱21和气动配重舱22均为密封舱,控制系统2和电池3设在电池电路舱21内,配重4和气动门控制器6设在气动配重舱22内;电池电路舱21对应的壳体上设有电路舱门23,气动配重舱22对应的壳体上设有气动配重舱门24,电路舱门23和气动配重舱门24均设有密封圈。
[0035]
所述的控制系统2包括主控制电路25和副控制电路26,主控制电路25包括主单片机27,主单片机27与信号发射接收器7、温度控制器8和姿态传感器9相连,主单片机27对于潜水器的姿态、位置以及上浮下潜进行计算和控制;副控制电路26包括副单片机28和存储器,副单片机28与科研系统相连,负责科研设备的计算和控制,存储器负责存储数据。
[0036]
所述的科研系统包括搭载机架29、顶部环形摄像头30、底部环形摄像头31、照明灯32(闪光灯)、外部温度传感器33、水质检测器34和设备通用接口35,所述的搭载机架29为环形,设在壳体1底部,环绕进水口14设置,顶部环形摄像头30设在壳体1顶部,环绕信号发射接收器7、温度控制器8和姿态传感器9设置,底部环形摄像头31、照明灯32、外部温度传感器33、水质检测器34和设备通用接口35分别设在搭载机架29上,并分别通过线路与控制系统2中的副单片机28相连;设备通用接口35用于连接外界设备;科研系统与电池3相连,由电池3供电。
[0037]
本实施例中潜水器的控制方法如下:
[0038]
(1)潜水器准备下潜之前,预设一个临界深度h
c
,测得水面上方实时气压p
w
和此时空气舱内气体温度t,带入已知潜水器的质量m、潜水器壳体体积v
b
和此时气体温度t,控制系统2根据如下公式计算出潜水器内气体物质的量n:
[0039][0040]
其中,h
c
为潜水器临界深度,z为压缩因子,由实验测得/查表得到,取值1.0
±
0.8,n为潜水器内气体物质的量,r为理想气体常数,取值8.314,t为气体的温度,m为潜水器与内部气体的总质量,空气质量可忽略不计,v
b
为潜水器壳体(关闭气动门潜水器总体积减去空气舱和通水管容积)的体积,p
w
为水面上方的压强,通常为大气压,ρ为水的密度,g为重力加速度。
[0041]
确定潜水器内气体物质的量n,再确定加入水的体积v
w
,向空气舱内注入v
w
体积的水,使初始时潜水器临界深度在水面以上,公式如下:
[0042][0043]
其中,v
w
为向空气舱内注入水的体积,z为压缩因子,n为潜水器内气体物质的量,r为理想气体常数,t为气体的温度,v
r
为空气舱和通水管容积;
[0044]
预设潜水器下降到目标深度h进行科研作业,进一步计算当临界深度为h时所对应的目标气体温度。
[0045]
(2)潜水器下水后,由于潜水器的临界深度高于水面,潜水器会直接下沉;壳体1顶部的湿度传感器8检测到水,即潜水器完全入水之后,信号发射接收器7开始工作,潜水器发射信号给地面/海面的信号发射接收器,通过地面/海面的声呐设备与潜水器的姿态传感器
9结合的方式实时反应潜水器所处的深度;
[0046]
(3)同时地面发射信号将该时刻当地的水面上实时大气压p
w
传给潜水器信号发射接收器7,潜水器信号发射接收器7将该时刻的深度以及当地的水面上大气压p
w
传给潜水器的控制系统2,控制系统2内主单片机27的临界深度计算模块计算出对应此深度的临界深度对应的气体温度:
[0047][0048]
其中,t为气体的温度,m为潜水器与内部气体的总质量,空气质量可忽略不计,g为重力加速度,ρ为水的密度,v
b
为潜水器壳体(关闭气动门潜水器总体积减去空气舱和通水管容积)的体积,h
c
为潜水器临界深度,z为压缩因子,n为潜水器内气体物质的量,r为理想气体常数,p
w
为水面上方的压强,通常为大气压;
[0049]
(4)控制系统2根据计算出的温度与内部温度传感器18检测的空气舱12内气体该时刻的温度比较,通过输出控制信号控制温度控制器10使空气舱12内气体温度快速达到计算的气体温度;由于潜水器仍然存在向下潜的速度,所以并不会在该平衡深度平衡,而是会继续向下运动,(2)(3)(4)过程在下潜过程中一直存在,使得潜水器始终存在一个向下的并不大的加速度;
[0050]
(5)当检测到潜水器实时深度h=h
‑
δh时,启动初级减速;δh为预设的缓冲区长度,δh=αh,其中,α为缓冲系数,缓冲系数需要根据潜水器形状,海中洋流情况等设定,h为目标检测深度;
[0051]
启动初级减速时,温度控制器10的温控板17启动为最大功率使气体温度快速达到目标气体温度,使该潜水器的临界深度迅速调整为目标深度,此时临界深度在潜水器的下方,潜水器有一个向上的加速度,并开始减速;同时,姿态传感器9开始实时反应潜水器的速度v与加速度a;
[0052]
由于海洋中的不确定因素,我们无法很好地通过理论预测潜水器此时的速度,所以通过三种情况讨论初级减速的过程:
[0053]
1)当潜水器速度减为零,但仍在目标深度之上,即有:
[0054]
h<h,v=0,a<0(
↑
)
[0055]
此时温度控制器10启动最大功率将气体温度快速降至临界深度为h
‑
δh的温度,有:
[0056][0057]
其中,t为气体的温度,m为潜水器与内部气体的总质量,空气质量可忽略不计,g为重力加速度,ρ为水的密度,v
b
为潜水器壳体(关闭气动门潜水器总体积减去空气舱和通水管容积)的体积,h
c
为潜水器临界深度,z为压缩因子,n为潜水器内气体物质的量,r为理想气体常数,p
w
为水面上方的压强,通常为大气压;
[0058]
此时,潜水器的临界深度在此时的深度以上,即会加速下沉,当检测潜水器的深度深于目标深度h时,温度控制器10启动最大功率升温至临界深度为h=h+δh所对应的温度,
有:
[0059][0060]
潜水器有向上的加速度,开始减速,由于缓冲系数α<1,第一次减速后所积累的速度远小于之前所积累的速度,故而,潜水器会在h<h+δh时速度降为零,并加速向上运动,当潜水器深度第二次达到目标深度后,启动目标深度逼近功能;
[0061]
2)若潜水器达到目标深度时速度恰好为零,即有
[0062]
h=h,v=0,a=0
[0063]
则气动门控制器6启动使气动门5关闭,由于此时潜水器整体密度等于水,则潜水器会漂浮在目标深度;
[0064]
若潜水器达到目标深度后仍有向下的速度,即有
[0065]
h>h,v>0,a>0
[0066]
此时温度控制器10启动最大功率升温至临界深度为h=h+δh所对应的温度,有:
[0067][0068]
若潜水器在h=h+δh之上速度降为零,潜水器开始上浮,当潜水器第二次上浮达到目标深度时,启动目标深度逼近功能;
[0069]
3)若潜水器在h=h+δh时速度仍未降为零,将临界深度再次下调δh,温度控制器10启动最大功率将气体温度快速升温至临界深度的温度,潜水器有向上的加速度,开始减速,直至潜水器无向下的速度,再次返回目标深度时,启动目标深度逼近功能;
[0070]
(6)目标深度逼近功能控制方法如下:
[0071]
设置目标深度为h,调节系数为s,方向系数f,速度向下时f为+1,速度向上时f为
‑
1,偏移限制深度为h
m
,偏移限制温度调节常数为[t];
[0072]
v
cmax
为三级调节速度上限
[0073]
v
bmax
为二级调节速度上限
[0074]
v
amax
为一级调节速度上限
[0075]
当潜水器到达目标深度h时,此时根据控制系统2计算出当前位置平衡温度为t1,通过温度控制器10将温度控制为t1,启动目标深度逼近功能;姿态传感器9检测当前潜水器瞬时速度v
h
,根据当前潜水器瞬时速度v
h
发送给控制系统2,从而确定调速档位;由于调速的方式是通过调整空气舱12内空气温度从而改变潜水器受力,进而改变加速度,因此调速档位的直接表现形式为对温度的调整:
[0076]
当|v
h
|>v
cmax
时,使用强力调节档位,使得t=t1(1+4fsv
h
),此时潜水器受反向加速度大,能够大幅度的对速度进行调节;
[0077]
当v
cmax
>|v
h
|>v
bmax
时,使用中级调节档位,使得t=t1(1+2fsv
h
),此时潜水器受反向加速度适中,能够中幅度的对速度进行调节;
[0078]
当v
bmax
>|v
h
|>v
amax
时,使用细微调节档位,使得t=t1(1+fsv
h
),此时潜水器受反向加速度较小,能够小幅度的对速度进行微调;
[0079]
当|v
h
|<v
amax
时,此时认为潜水器的速度近似于0,符合静态标准,启动气动门控制器6,将气动门5关闭,温度控制器10停止工作;关闭后潜水器平均密度保持不变,在温控板17不运转时保持潜水器在此位置的近似稳态,达到节约能源、提高续航时间的要求,同时科研系统启动;
[0080]
(7)由于水中存在洋流,海洋生物运动撞击等因素,在近似稳态时的潜水器可能会产生一定的上下偏移,因此近似稳态时,潜水器仍不断检测自身深度h
x
发送给控制系统2中的偏移限制模块,当深度|h
‑
h
x
|>h
m
时,气动门控制器6启动,气动门5打开,姿态传感器9将当前速度传送给控制系统2中的偏移限制模块,得出调节温度为t2=t+f[t],通过温度控制器10调节温度,使得潜水器受反方向作用力,回到目标深度;
[0081]
当潜水器穿过目标深度点时,启动目标深度逼近功能,使得潜水器在目标深度达到稳定;
[0082]
(8)在目标深度作业时,由于海中兴波、洋流等影响,潜水器很可能在平面上产生偏移,所以在控制系统2中设置gps定位
‑
平面移动模块,进行水平方位控制:
[0083]
以预定点位置作为原点,水平两方向位移坐标分别为x,y,设潜水器工作水平区间为:|x|<x
max
,|y|<y
max
,当潜水器的水平方位在此区域内时,视作潜水器在工作区间,潜水器可正常实行科研系统;
[0084]
由于潜水器并不仅仅需要限制在定点深度工作,同时也要限制潜水器的水平方位,这样才能实现所需要的定点监测功能,不至于造成较大方位误差;因此我们设计潜水器在工作过程中不断通过信号发射接收器与gps定位系统进行信号传输,检测当前水平方位;
[0085]
若当前水平方位超出工作水平区间时,启动螺旋桨11调整水平位置,通过调节潜水器x,y方向的速度对潜水器的位置进行调整,期间仍不断与gps定位系统进行信号传输,直到检测得目前水平方位在工作水平区间内时,停止螺旋桨电机19的转动,使得其稳定在工作水平区间内;
[0086]
(9)回收时,地面向潜水器发射控制信号,温控板17加热,打开气动门5,使临界深度持续超出此时潜水器深度,直到潜水器上升至水面为止。