1.本发明涉及一种温差能驱动的新型结构海洋剖面探测浮标及其工作方法,具体为一种集成温差能相变储热发电并能够实现固定深度探测的海洋探测浮标,属于海洋探测技术领域。
背景技术:
2.海洋探测浮标是各国进行海洋资源探测、开发的重要设备,其通过调节浮力大小来实现在海水中上下循环的剖面运动,并且在运动过程中持续监测海洋参数。
3.目前,已经投入使用的浮标多采用锂电池供能,为了延长浮标的使用寿命,各机构纷纷把目光投向海水中蕴含的各种能源。表层海水和深层海水之间以温度差形式储存着丰富的热能,而浮标的运动形式恰好是在表层海水与深层海水中往返,因此采用温差能供电的新型浮标成为大家研究的重点。新型浮标利用表层海水与深层海水的温度差以及浮标上下剖面运动的工作特性,完成传热工质的相变,工质发生体积变化进而将海水的温差能转化为液压能并进行发电以给装置提供能源。
4.随着海洋探测的需求增加,单纯的上下运动过程已经不能满足探测需要,亟需一种利用温差能驱动并且可以实现定深悬浮控制的海洋探测浮标,同时现有的面向海洋仪器供电的温差能发电方案换热结构复杂且效率较低,本发明也给予了改进。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种温差能驱动的新型结构海洋剖面探测浮标及其工作方法,由温差发电驱动,并且能够实现浮力的精准控制,进而完成不同情况下的海洋探测。
6.本发明采用以下技术方案:
7.一种温差能驱动的新型结构海洋剖面探测浮标,包括换热管和外壳,所述外壳由壳体和两端的浮力材料组成,所述壳体内设置有能量转换箱、蓄能器、电磁换向阀a、电磁换向阀b、电磁换向阀c、液压马达、发电机、齿轮泵、液压缸a和液压缸b;
8.所述换热管内盛有相变材料,并通过管路与能量转换箱连接,所述能量转换箱为一圆柱形结构,其内也为相变材料,所述能量转换箱内设有换热皮囊,是温差能转换液压能的重要结构,换热皮囊内为液压油,与相变材料互不接触;
9.所述蓄能器与能量转换箱经单向阀a相连接,以储存转化出的液压能,单向阀a可以防止蓄能器释能时油液反向流动,所述蓄能器还分别与电磁换向阀a和电磁换向阀b连接,分别控制发电回路与浮力控制回路,电磁换向阀a与液压马达相连接,液压马达还连接有发电机和储能模块,共同组成发电回路,电磁换向阀b与液压缸b连接,同时通过节流口和电磁换向阀c与液压缸a连接,液压缸b与液压缸a相连接,且其管路上设置有单向阀b和齿轮泵,所述齿轮泵连接有步进电机;所述液压缸a通过单向阀c与换热皮囊相连接,形成回油路;所述蓄能器、液压缸b和液压缸a分别连接有压力计a、压力计b和压力计c,分别用于测量
蓄能器、液压缸b和液压缸a的压力;
10.所述液压缸b连接有一外皮囊,所述外皮囊位于底部的浮力材料中,所述底部的浮力材料上设有开孔,通过开孔将外皮囊暴露在海水中。
11.本发明的整个装置分为三大部分,分别为换热部分、发电部分、浮力调节部分,换热部分由换热管、能量转换箱、换热皮囊、蓄能器组成;发电部分由蓄能器、电磁换向阀、液压马达、发电机、整流电路以及蓄电池组成;浮力调节部分由电磁换向阀、液压缸a、液压缸b、外皮囊、齿轮泵、步进电机组成,本发明通过对液压原理的设计,对几个功能进行了分区,让系统互不干扰,运行的更加稳定。
12.优选的,所述壳体呈圆柱形,浮力材料为半椭球形结构,所述换热管的数量为多个,多个换热管沿壳体的长度方向分布,且均匀分布于壳体周围,即多个换热管环绕在壳体周围,多个换热管均通过管路与能量转换箱连接,能量转换箱与换热皮囊之间为腔b,换热管的腔a与腔b相通。
13.优选的,所述壳体两端均固定设置有一安装支架,换热管固定于两个安装支架之间。
14.本发明的换热管由环绕在壳体周围的多个换热管组成,不仅数量增多,换热管内外面同时接触海水,大大增加了与海水的接触面积,缩短了相变所需要的时间,并且,相较于传统结构,本发明无需在管内集成皮囊,极大程度的降低了制造成本和制造难度。
15.本发明的浮力材料具有密度小体积大的优点,可对装置浮力进行补充,浮力材料由两个半椭球形组成,分别位于壳体的顶部和底部,常见的浮标形状有球型、水滴型、锥型等,本发明可通过流体仿真计算得出流线型,通过优化外形,尽可能地减小了运动过程中海水阻力对装置的影响。
16.优选的,所述相变材料为相变温度18.2℃的正十六烷,其相变温度处于表层海水和深层海水之间,可随装置在海水中的剖面移动完成相变,其相变的膨胀率约为9%。
17.优选的,所述液压缸a中设置有拉线位移传感器,液压缸b中设置有磁致伸缩位移传感器,本发明采用了两个液压缸作为液压回路内的储油装置,液压缸a中的拉线位移传感器,液压缸b的磁致伸缩位移传感器,可以实时监测液压缸内油量,为精确控制浮力提供保障。
18.拉线位移传感器位于液压缸a底面外部,拉线末端与活塞相连,活塞运动,拉线传感器监测拉线长度即可判断活塞位置,拉线位移传感器外设有防护罩进行保护;
19.液压缸a包括腔e和腔f,腔e和腔f之间设置活塞,液压缸b包括腔c和腔d,腔c和腔d之间设置活塞,液压缸b的腔c与液压缸a的腔e相连接,腔d与外皮囊相连接。
20.优选的,磁致伸缩位移传感器处于液压缸b内,其磁环位于活塞中间,用于检测活塞运动,液压缸a和液压缸b的活塞下部均设置有弹簧座,液压缸a的活塞与弹簧座之间,以及液压缸b与弹簧座之间均设置有弹簧,可在活塞复位时提供一定的辅助动力。
21.优选的,液压马达和发电机可将液压能转化为机械能再变化为电能,供整个装置使用,所述发电机为三相永磁交流同步发电机,经液压马达带动发出三相电,经三相整流电路将三相电转化成两相电并在储能模块进行储存;
22.电磁换向阀a、电磁换向阀b、电磁换向阀c均为两位两通电磁换向阀。
23.本发明采用了三个两位两通电磁换向阀来实现对整个液压回路的控制,各功能回
路间互不干扰,且将阀体等液压元件分别集成在两个液压阀块内,即单向阀a、单向阀c、电磁换向阀a和电磁换向阀b集中在一个液压阀块内,单向阀b、电磁换向阀c和节流口集中在另一个液压阀块内,规整了装置内的模块布局,方便了各部分的调试安装,两位两通电磁换向阀采用是的体积较小的插装式换向阀,在有限的空间内实现功能。
24.一种上述的温差能驱动的新型结构海洋剖面探测浮标的工作方法,包括:
25.当浮标放入海水中,此时蓄能器处于满能状态,先进行下潜运动,电磁换向阀a和电磁换向阀b处于常闭状态,打开电磁换向阀c,由于海水压强作用,暴露在海水中的外皮囊承受海水压强,外皮囊内的液压油经过节流口、电磁换向阀c进入液压缸a的腔e内,同时液压缸a的腔f内的拉线位移传感器,实时监测活塞运动以监控系统油量,外皮囊内油液减少,体积缩小,装置浮力减小,开始下潜,换热管内的相变材料常温下为液态,随着下潜深度增加,海水温度逐渐降低,相变材料发生相变,由液态转化为固态的过程中体积减小,能量转换箱内的相变材料对换热皮囊的压力减小,换热皮囊所处位置呈低压,液压缸a内的油液由单向阀c向换热皮囊流动,同时液压缸a内的弹簧为活塞复位提供辅助动力,在浮标运动时通过海洋探测设备对海洋环境进行监测,海洋探测设备可以是温盐深测量仪、水听器、升学多普勒剖面仪、海流计、叶绿素荧光机、光学反向散射计等,通常装在浮标的两端;
26.当浮标下潜到预定深度时,关闭电磁换向阀a和电磁换向阀c,打开电磁换向阀b,此时蓄能器进行释能,蓄能器内的油液通过电磁换向阀b的腔c,液压缸b的活塞向下移动,液压缸b的腔d内的油液压入外皮囊,外皮囊体积增大,装置浮力增加,开始上浮,蓄能器释能后蓄能器所在回路处于低压状态,油液从液压缸a经单向阀c向其所在回路补充,上浮过程中海水温度逐渐变暖,换热管内的相变材料再次发生相变,由固态转化为液态,体积增大,在能量转换箱腔b的相变材料对换热皮囊进行挤压,换热皮囊通过单向阀a与蓄能器相连接,油液通过管路给蓄能器充能,压力计a实时监控蓄能器内压力,装置上浮过程中亦可持续探测海洋环境,浮标上浮至预设位置,至此完成一个循环。
27.优选的,当浮标下潜到预定深度时,关闭电磁换向阀b和电磁换向阀c,打开电磁换向阀a,蓄能器释能,油液经电磁换向阀a带动液压马达转动,与液压马达通过联轴器相连的发电机开始发电,后通过整流电路整流,储存在储能模块内,如蓄电池,为浮标供电。
28.优选的,海洋探测设备在对海洋进行探测任务时,需要悬停对某一海洋平面进行探测,当装置处于下潜状态需要完成悬停探测任务时,关闭电磁换向阀c,通过步进电机使齿轮泵工作,齿轮泵将液压缸a的腔e内的油液通过单向阀b抽取到液压缸b的腔c中,以增加外皮囊的体积,进而增加装置浮力,实现浮力平衡,停止运动:
29.当装置处于上浮状态需要完成悬停探测任务时,关闭电磁换向阀a和电磁换向阀b,并打开电磁换向阀c,外皮囊内油液在海水压力作用下由节流口、电磁换向阀c缓慢向液压缸a的腔e中流入,减小装置浮力,实现浮力平衡,停止运动。在实现浮力动态平衡的过程中通过电磁换向阀c和齿轮泵的工作,对外皮囊内油量进行增减调节,进而调整装置浮力,改变装置的运动状态。
30.本发明可由浮标内部的深度传感器判断浮标的运动状态,捕捉浮标运动信息,通过电磁换向阀c的开合来减小外皮囊的体积,从而减小装置浮力,通过齿轮泵向液压缸b中补充油液来增加外皮囊的体积,从而增加装置浮力,经过实时控制,可实现装置在海水中的任意高度悬停,从而完成更多探测任务,本发明的液压缸a、液压缸b的位移传感器可实时监
控活塞位移,得知油缸油量来判断外皮囊的大大小,齿轮泵和步进电机可精确的控制外皮囊内的油量,实现装置浮力的实时调节。
31.需要说明的是,本发明的调控过程还需要控制系统的参与,控制系统并不是本发明的重点,采用现有技术即可,此处不再赘述。
32.本发明未详尽之处,均可采用现有技术。
33.本发明的有益效果为:
34.1)本发明的结构除换热管和外皮囊之处,其他结构均集成在壳体内,不与海水接触,装置的剖面运动靠调节外皮囊的大小进而调节装置浮力来实现。
35.2)本发明的换热管由环绕在壳体周围的多个换热管组成,不仅数量增多,换热管内外面同时接触海水,大大增加了与海水的接触面积,缩短了相变所需要的时间,并且,相较于传统结构,本发明无需在管内集成皮囊,极大程度的降低了制造成本和制造难度,本发明还加入了能量转换箱,通过膨胀的相变材料挤压液压油的方式来完成温差能和液压能的转换,更加可靠。
36.3)本发明不仅能够实现的上下运动,还可以实现海平面以下的定深悬浮探测。
37.4)本发明浮标的外形结构,使浮标更加稳定可靠。
附图说明
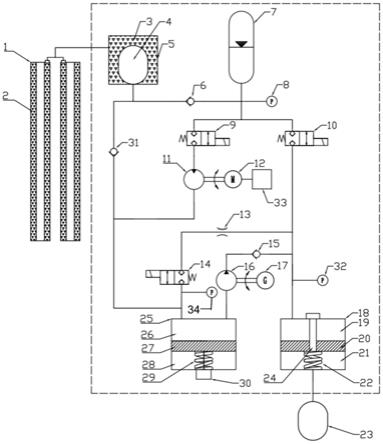
38.图1为本发明的液压系统原理示意图;
39.图2为本发明的整体结构示意图;
40.图3为本发明中能量交换箱的剖面正视图;
41.图4为本发明中液压缸a的结构示意图;
42.图5为本发明中液压缸b的结构示意图;
43.图中,1
‑
换热管,2
‑
腔a,3
‑
腔b,4
‑
换热皮囊,5
‑
能量转换箱,6
‑
单向阀a,7
‑
蓄能器,8
‑
压力计a,9
‑
电磁换向阀a,10
‑
电磁换向阀b,11
‑
液压马达,12
‑
发电机,13
‑
节流口,14
‑
电磁换向阀c,15
‑
单向阀b,16
‑
齿轮泵,17
‑
步进电机,18
‑
液压缸b,19
‑
腔c,20
‑
液压缸b的活塞,21
‑
腔d,22
‑
弹簧b,23
‑
外皮囊,24
‑
磁致伸缩位移传感器,25
‑
液压缸a,26
‑
腔e,27
‑
液压缸a的活塞,28
‑
腔f,29
‑
弹簧a,30
‑
拉线位移传感器,31
‑
单向阀c,32
‑
压力计b,33
‑
储能模块,34
‑
压力计c,35
‑
壳体,36
‑
浮力材料。
具体实施方式:
44.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述,但不仅限于此,本发明未详尽说明的,均按本领域常规技术。
45.实施例1:
46.一种温差能驱动的新型结构海洋剖面探测浮标,如图1
‑
5所示,包括换热管1和外壳,外壳由壳体35和两端的浮力材料36组成,壳体35内设置有能量转换箱5、蓄能器7、电磁换向阀a 9、电磁换向阀b 10、电磁换向阀c 14、液压马达11、发电机12、齿轮泵16、液压缸a 25和液压缸b 18;
47.换热管1内盛有相变材料,并通过管路与能量转换箱5连接,能量转换箱5为一圆柱形结构,其内也为相变材料,能量转换箱5内设有换热皮囊4,是温差能转换液压能的重要结
构,换热皮囊4内为液压油,与相变材料互不接触;
48.蓄能器7与能量转换箱5经单向阀a 6相连接,以储存转化出的液压能,单向阀a 6可以防止蓄能器释能时油液反向流动,蓄能器7还分别与电磁换向阀a 9和电磁换向阀b 10连接,分别控制发电回路与浮力控制回路,电磁换向阀a 9与液压马达11相连接,液压马达11还连接有发电机12和储能模块33,共同组成发电回路,电磁换向阀b 10与液压缸b 18连接,同时通过节流口13和电磁换向阀c 14与液压缸a 25连接,液压缸b 18与液压缸a 25相连接,且其管路上设置有单向阀b 15和齿轮泵16,齿轮泵16连接有步进电机17;液压缸a 25通过单向阀c 31与换热皮囊4相连接,形成回油路;蓄能器7、液压缸b 18和液压缸a 25分别连接有压力计a 8、压力计b 32和压力计c 34,分别用于测量蓄能器、液压缸b和液压缸a的压力;
49.液压缸b18连接有一外皮囊23,外皮囊23位于底部的浮力材料中,底部的浮力材料上设有开孔,通过开孔将外皮囊23暴露在海水中。
50.本发明的整个装置分为三大部分,分别为换热部分、发电部分、浮力调节部分,换热部分由换热管、能量转换箱、换热皮囊、蓄能器组成;发电部分由蓄能器、电磁换向阀、液压马达、发电机、整流电路以及蓄电池组成;浮力调节部分由电磁换向阀、液压缸a、液压缸b、外皮囊、齿轮泵、步进电机组成,本发明通过对液压原理的设计,对几个功能进行了分区,让系统互不干扰,运行的更加稳定。
51.实施例2:
52.一种温差能驱动的新型结构海洋剖面探测浮标,如实施例1所述,不同的是,如图2所示,壳体35呈圆柱形,浮力材料36为半椭球形结构,换热管1的数量为多个,多个换热管沿壳体的长度方向分布,且均匀分布于壳35体周围,即多个换热管环绕在壳体周围,多个换热管均通过管路与能量转换箱5连接,如图1所示,能量转换箱5与换热皮囊之间为腔b 3,换热管的腔a 2与腔b 3相通,其内均充有相变材料。
53.壳体35两端均固定设置有一安装支架,换热管固定于两个安装支架之间。
54.本发明的换热管由环绕在壳体周围的多个换热管组成,不仅数量增多,换热管内外面同时接触海水,大大增加了与海水的接触面积,缩短了相变所需要的时间,并且,相较于传统结构,本发明无需在管内集成皮囊,极大程度的降低了制造成本和制造难度。
55.本发明的浮力材料具有密度小体积大的优点,可对装置浮力进行补充,浮力材料由两个半椭球形组成,分别位于壳体的顶部和底部,常见的浮标形状有球型、水滴型、锥型等,本发明可通过流体仿真计算得出流线型,通过优化外形,尽可能地减小了运动过程中海水阻力对装置的影响。
56.实施例3:
57.一种温差能驱动的新型结构海洋剖面探测浮标,如实施例1所述,不同的是,相变材料为相变温度18.2℃的正十六烷,其相变温度处于表层海水和深层海水之间,可随装置在海水中的剖面移动完成相变,其相变的膨胀率约为9%。
58.实施例4:
59.一种温差能驱动的新型结构海洋剖面探测浮标,如实施例1所述,不同的是,液压缸a 25中设置有拉线位移传感器30,液压缸b18中设置有磁致伸缩位移传感器24,本发明采用了两个液压缸作为液压回路内的储油装置,液压缸a中的拉线位移传感器,液压缸b的磁
致伸缩位移传感器,可以实时监测液压缸内油量,为精确控制浮力提供保障。
60.拉线位移传感器30位于液压缸a底面外部,拉线末端与液压缸a的活塞27相连,活塞运动,拉线位移传感器30监测拉线长度即可判断活塞位置,拉线位移传感器外设有防护罩进行保护;
61.液压缸a 25包括腔e 26和腔f 28,腔e 26和腔f 28之间设置液压缸a的活塞27,液压缸b 18包括腔c 19和腔d 21,腔c和腔d之间设置液压缸b的活塞20,液压缸b的腔c与液压缸a的腔e相连接,腔d 21与外皮囊23相连接。
62.磁致伸缩位移传感器处于液压缸b内,其磁环位于活塞中间,用于检测活塞运动,液压缸a和液压缸b的活塞下部均设置有弹簧座,液压缸a的活塞与弹簧座之间设置有弹簧a 29,以及液压缸b与弹簧座之间均设置有弹簧b 22,可在活塞复位时提供一定的辅助动力。
63.实施例5:
64.一种温差能驱动的新型结构海洋剖面探测浮标,如实施例1所述,不同的是,液压马达11和发电机12可将液压能转化为机械能再变化为电能,供整个装置使用,发电机12为三相永磁交流同步发电机,经液压马达带动发出三相电,经三相整流电路将三相电转化成两相电并在储能模块进行储存;
65.电磁换向阀a 9、电磁换向阀b 10、电磁换向阀c 14均为两位两通电磁换向阀。
66.本发明采用了三个两位两通电磁换向阀来实现对整个液压回路的控制,各功能回路间互不干扰,且将阀体等液压元件分别集成在两个液压阀块内,即单向阀a、单向阀c、电磁换向阀a和电磁换向阀b集中在一个液压阀块内,单向阀b、电磁换向阀c和节流口集中在另一个液压阀块内,规整了装置内的模块布局,方便了各部分的调试安装,两位两通电磁换向阀采用是的体积较小的插装式换向阀,在有限的空间内实现功能。
67.实施例6:
68.一种温差能驱动的新型结构海洋剖面探测浮标的工作方法,包括:
69.当浮标放入海水中,此时蓄能器7处于满能状态,先进行下潜运动,电磁换向阀a 9和电磁换向阀b 10处于常闭状态,打开电磁换向阀c 14,由于海水压强作用,暴露在海水中的外皮囊23承受海水压强,外皮囊23内的液压油经过节流口13、电磁换向阀c14进入液压缸a的腔e 26内,同时液压缸a的腔f 28内的拉线位移传感器30,实时监测活塞运动以监控系统油量,外皮囊23内油液减少,体积缩小,装置浮力减小,开始下潜,换热管1内的相变材料常温下为液态,随着下潜深度增加,海水温度逐渐降低,相变材料发生相变,由液态转化为固态的过程中体积减小,能量转换箱5内的相变材料对换热皮囊4的压力减小,换热皮囊所处位置呈低压,液压缸a内的油液由单向阀c 31向换热皮囊流动,同时液压缸a内的弹簧为活塞复位提供辅助动力,在浮标运动时通过海洋探测设备对海洋环境进行监测,海洋探测设备可以是温盐深测量仪、水听器、升学多普勒剖面仪、海流计、叶绿素荧光机、光学反向散射计等,通常装在浮标的两端;
70.当浮标下潜到预定深度时,关闭电磁换向阀a 9和电磁换向阀c 14,打开电磁换向阀b 10,此时蓄能器进行释能,蓄能器7内的油液通过电磁换向阀b的腔c 19,液压缸b的活塞向下移动,液压缸b的腔d 21内的油液压入外皮囊,外皮囊23体积增大,装置浮力增加,开始上浮,蓄能器释能后蓄能器所在回路处于低压状态,油液从液压缸a经单向阀c向其所在回路补充,上浮过程中海水温度逐渐变暖,换热管内的相变材料再次发生相变,由固态转化
为液态,体积增大,在能量转换箱腔b 3的相变材料对换热皮囊4进行挤压,换热皮囊4通过单向阀a 6与蓄能器7相连接,油液通过管路给蓄能器充能,压力计a 8实时监控蓄能器7内压力,装置上浮过程中亦可持续探测海洋环境,浮标上浮至预设位置,至此完成一个循环。
71.实施例7:
72.一种温差能驱动的新型结构海洋剖面探测浮标的工作方法,如实施例6所述,不同的是,当浮标下潜到预定深度时,关闭电磁换向阀b 10和电磁换向阀c 14,打开电磁换向阀a 9,蓄能器7释能,油液经电磁换向阀a 9带动液压马达11转动,与液压马达11通过联轴器相连的发电机12开始发电,后通过整流电路整流,储存在储能模块33内,如蓄电池,为浮标供电。
73.实施例8:
74.一种温差能驱动的新型结构海洋剖面探测浮标的工作方法,如实施例6所述,不同的是,海洋探测设备在对海洋进行探测任务时,需要悬停对某一海洋平面进行探测,当装置处于下潜状态需要完成悬停探测任务时,关闭电磁换向阀c 14,通过步进电机17使齿轮泵16工作,齿轮泵16将液压缸a的腔e 26内的油液通过单向阀b 15抽取到液压缸b的腔c 19中,以增加外皮囊23的体积,进而增加装置浮力,实现浮力平衡,停止运动:
75.当装置处于上浮状态需要完成悬停探测任务时,关闭电磁换向阀a 9和电磁换向阀b 10,并打开电磁换向阀c 14,外皮囊23内油液在海水压力作用下由节流口13、电磁换向阀c 14缓慢向液压缸a的腔e 26中流入,减小装置浮力,实现浮力平衡,停止运动。在实现浮力动态平衡的过程中通过电磁换向阀c和齿轮泵的工作,对外皮囊内油量进行增减调节,进而调整装置浮力,改变装置的运动状态。
76.本发明可由浮标内部的深度传感器判断浮标的运动状态,捕捉浮标运动信息,通过电磁换向阀c的开合来减小外皮囊的体积,从而减小装置浮力,通过齿轮泵向液压缸b中补充油液来增加外皮囊的体积,从而增加装置浮力,经过实时控制,可实现装置在海水中的任意高度悬停,从而完成更多探测任务,本发明的液压缸a、液压缸b的位移传感器可实时监控活塞位移,得知油缸油量来判断外皮囊的大大小,齿轮泵和步进电机可精确的控制外皮囊内的油量,实现装置浮力的实时调节。
77.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。