1.本发明属于船舶运动控制技术与船用特别辅助装备领域,涉及一种基于magnus效应来改进传统减摇鳍的高端海洋工程装备,尤其涉及一种适用于全航速的船用减摇装置。
背景技术:
2.船舶在海面航行受海风、海浪等自然环境的干扰,会不可避免地产生摇荡运动,其中横摇运动最为明显。横摇运动会影响船体位姿和船员安全,为降低此类影响,对船舶应用高端海洋工程装备是最常见也是最有效的解决方案之一。此类高端海洋工程装备的类别很多,具体涉及舭龙骨、减摇水舱、减摇陀螺仪和外放式减摇装置等,其中外放式减摇装置的应用最为广泛。
3.传统减摇鳍是最常见的一种外放式减摇装置,它可以通过改变鳍的攻角的方式来产生对抗横摇的流体作用力,从而达到减少横摇的目的。为提升此类外放式减摇装置的性能,工程上针对传统减摇鳍提出了改进方案。面积变形的平行四边形减摇鳍是一种改进了传统减摇鳍的展弦比、和鳍面形状的减摇鳍设计方案,其实质是通过增加减摇鳍的有效投影面积,以及改变工作方式(主动拍动)来完善减摇鳍在船舶处于低/零航速状态下的减摇能力。此外magnus减摇装置作为另一种外放式减摇装置,也可因其主动摆动和旋转的工作特点而具有全航速减摇能力。但是目前这些常见的外放式减摇装置存在以下问题:
4.(1)传统减摇鳍产生的流体作用力的大小与来流速度的平方近似成正比,其工作机理依赖于船舶航行时引起的较大相对速度,所以在船舶处于低/零航速状态时,传统减摇鳍将无法产生较大的流体作用力,这会导致传统减摇鳍的减摇效果极差甚至不能减摇,并且传统减摇鳍受限于额定攻角的大小,在任意航速下产生的流体作用力都会有一个限值,产生的流体作用力有时会不足以抵抗过大的横摇力;
5.(2)宋吉广的论文《全航速减摇鳍鳍型优化设计》中所述的面积变形的平行四边形减摇鳍在拍动过程中的流体作用力的大小会随鳍角的改变而发生周期性的变化,并非稳定增加或降低,这将使其不容易实现稳定的控制,并且面积变形的平行四边形减摇鳍所增加的有效投影面积是靠展开鳍面获得的,这会增加减摇鳍工作时所受到的阻力,进而增加船舶航行时的能耗;
6.(3)pangalila的专利《fixed
‑
angle stabilizing fin system》和kollenberger的专利《stabilizing device for ships》中所述的船用magnus减摇装置在船舶处于低/零航速下可以使装置表面产生一定的流体作用力,但是其工作时的有效投影面积较小,产生的流体作用力不够大,所以magnus减摇装置的使用效率不够高,减摇效果不够好,并且摆动时所提供的流体作用力的方向会随摆动周期发生实时的变化。
7.综上所述:目前传统减摇鳍很难保证在全航速下都能具有理想的减摇能力,并且提供的流体作用力会受到攻角的限制;面积变形的平行四边形减摇鳍受限于自身流体作用力的产生机理,无法产生非周期性的恒定的且利于控制的流体作用力,同时阻力的增大会增加船舶航行时的能耗;magnus减摇装置自身存在着本质缺陷,使用效率不够高,减摇效果
不够好,并且无法消除其在低/零航速时流体作用力的方向的变化。
技术实现要素:
8.本发明的目的是结合传统减摇鳍和magnus减摇装置的流体作用力产生机理,使用圆柱体减摇装置对传统减摇鳍的鳍头进行改进,提供一种适用于全航速的船用减摇装置,使其产生的流体作用力的方向和大小恒定、不会受到攻角的限制也不会发生周期性的变化,并且保留了原有鳍头的流线型结构,使其不会额外增加过多的阻力,可以在不耗费过多能源的前提下,具备全航速的减摇能力。
9.为实现上述目的,本发明采用的技术方案如下:提供一种适用于全航速的船用减摇装置,其特征在于:包括鳍型减摇装置、圆柱体减摇装置、圆柱体减摇装置传动杆、电动机、鳍型减摇装置传动杆、底座;
10.所述鳍型减摇装置属于本发明的主体部分之一,与鳍型减摇装置传动杆相连,用于通过水流的流速差来提供流体作用力;
11.所述圆柱体减摇装置属于本发明的主体部分之一,与圆柱体减摇装置传动杆相连,用于通过水流的流速差来提供流体作用力;
12.所述圆柱体减摇装置传动杆,与圆柱体减摇装置和电动机相连,用于提供传动作用,使圆柱体减摇装置旋转;
13.所述电动机,与圆柱体减摇装置传动杆和底座相连,用于提供传动杆旋转时所需要的动力;
14.所述鳍型减摇装置传动杆,与鳍型减摇装置和底座相连,用于提供传动作用,使鳍型减摇装置产生非摆动的转动运动,从而改变攻角;
15.所述底座,与鳍型减摇装置传动杆和电动机相连,用于提供衔接作用和支撑作用。
16.依据船舶航行时的航速不同,可将船舶的航行分为三种航行状态:中高速航行状态、低速航行状态和零速航行状态。依据上述航行状态可将本发明设置为三种工作模式,这三种工作模式下的流体作用力的产生方式和大小分别为:
17.s1:当船体处于中高速航行状态时,设定本发明的工作模式为:鳍型减摇装置传动杆带动鳍型减摇装置做攻角变换运动,此时船体与水流的相对速度较大,可以只用传统减摇鳍通过改变攻角的方法来提供流体作用力,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0018][0019]
式中:ρ为流体密度,l1为圆柱体减摇装置的长度,l3为鳍型减摇装置的长度,v为船体与水流的相对速度,c
l
为鳍型减摇装置在做攻角变换运动时的升力系数;
[0020]
s2:当船体处于低速航行状态时,设定本发明的工作模式为:鳍型减摇装置传动杆带动鳍型减摇装置做攻角变换运动,同时圆柱体减摇装置传动杆带动圆柱体减摇装置做旋转运动,此时船体与水流的相对速度较小,通过改变攻角所得到的流体作用力较小,圆柱体减摇装置自主旋转的运动方式可以弥补流体作用力的不足,由于流体粘性效应,当圆柱体减摇装置旋转时,柱面上的水流会被带动着流动,而同时圆柱体减摇装置的柱面上的水流也会带动鳍型减摇装置表面的水流流动,当圆柱体减摇装置顺时针旋转时会带动鳍型减摇
装置的下表面的水流流动,当圆柱体减摇装置逆时针旋转时会带动鳍型减摇装置的上表面的水流流动,流动的水流会使柱面两侧和鳍型减摇装置的鳍面上下两侧的水流的速度不同进而产生压强差,由此压强差引起的压力的总效果将分别对圆柱体减摇装置的柱面和鳍型减摇装置的鳍面产生一个垂直于水流方向的流体作用力,且当圆柱体减摇装置顺时针旋转时作用力方向向下,当逆时针旋转时作用力方向向上,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0021][0022]
式中:ρ为流体密度,a为某一常数,与圆柱体减摇装置表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,r为圆柱体减摇装置的半径,v为船体与水流的相对速度,ω为圆柱体减摇装置的转速,l1为圆柱体减摇装置的长度,l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度,l3鳍型减摇装置的长度,c
l
为鳍型减摇装置在做攻角变换运动时的升力系数;
[0023]
s3:当船体处于零速航行状态时,设定本发明的工作模式为:圆柱体减摇装置传动杆带动圆柱体减摇装置做旋转运动,此时船体与水流的相对速度为零,通过改变攻角并不会得到流体作用力,并且圆柱体减摇装置本身也将失去压强差从而无法提供流体作用力,但是圆柱体减摇装置表面流动的水流会带动鳍型减摇装置表面的水流流动,流体作用力将通过鳍型减摇装置表面的水流的流速差形成的压强差来产生,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0024][0025]
式中:ρ为流体密度,a为某一常数,与圆柱体减摇装置表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,r为圆柱体减摇装置的半径,ω为圆柱体减摇装置的转速,l1为圆柱体减摇装置的长度,l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度。
[0026]
本发明具有如下有益效果:
[0027]
(1)相比于传统减摇鳍,本发明产生的用来抵抗横摇力的流体作用力足够大,解决了传统减摇鳍受限于额定攻角的大小,产生的流体作用力会有一个限值的问题,且在船舶处于低/零航速时,本发明也可以提供用来抵消海浪扰动所需要的流体作用力,消除了传统减摇鳍在低/零航速时的减摇效果极差甚至不能减摇的缺陷,具备了适用于全航速的减摇能力;
[0028]
(2)相比于面积变形的平行四边形减摇鳍,本发明设计的圆柱体减摇装置保留了原有鳍头的流线型结构,不会过分增加阻力,避免了因阻力而带来的能源损耗,此外流体作用力不会发生周期性变化,控制起来更为方便和稳定;
[0029]
(3)相比于船用magnus减摇装置,本发明增大了工作时的有效投影面积,使其在相同能耗下的使用效率和产生的流体作用力得到了提高,并且得益于鳍型减摇装置传动杆只做转动运动而不做摆动运动,本发明避免了因鳍轴周期性摆动改变流体作用力方向而给船舶造成的不利影响。
附图说明
[0030]
为了更清楚地说明现有技术中的技术方案和本发明的实施例,下面将对现有技术和实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0031]
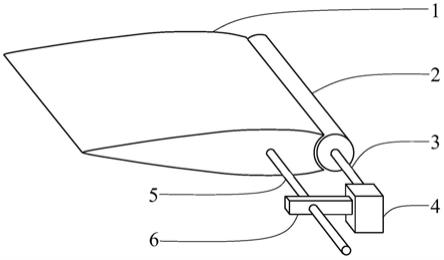
图1为本发明的装置结构示意图;
[0032]
图2为传统减摇鳍获得流体作用力的原理图;
[0033]
图3为面积变形的平行四边形减摇鳍获得流体作用力的原理图;
[0034]
图4为magnus减摇装置获得流体作用力的原理图;
[0035]
图5为magnus减摇装置摆动的原理图;
[0036]
图6为本发明的参数示意图;
[0037]
图7为圆柱体减摇装置工作方式示意图;
[0038]
图8为圆柱体减摇装置受力分析示意图;
[0039]
图9为鳍型减摇装置受力分析示意图;
[0040]
图10为中高速航行状态下装置的工作示意图;
[0041]
图11为低速航行状态下装置的工作示意图;
[0042]
图12为零速航行状态下装置的工作示意图;
[0043]
图13本发明与现有技术方案的升力变化对比曲线。
[0044]
附图标记:1
‑
鳍型减摇装置,2
‑
圆柱体减摇装置,3
‑
圆柱体减摇装置传动杆,4
‑
电动机,5
‑
鳍型减摇装置传动杆,6
‑
底座。
具体实施方式
[0045]
为使本发明的上述目的、特征和优点更加明显易懂,下面结合附图对本发明进行详细描述:
[0046]
如图1所示,一种适用于全航速的船用减摇装置,其特征在于:包括鳍型减摇装置1、圆柱体减摇装置2、圆柱体减摇装置传动杆3、电动机4、鳍型减摇装置传动杆5、底座6;
[0047]
所述鳍型减摇装置属于本发明的主体部分之一,与鳍型减摇装置传动杆相连,用于通过水流的流速差来提供流体作用力;
[0048]
所述圆柱体减摇装置属于本发明的主体部分之一,与圆柱体减摇装置传动杆相连,用于通过水流的流速差来提供流体作用力;
[0049]
所述圆柱体减摇装置传动杆,与圆柱体减摇装置和电动机相连,用于提供传动作用,使圆柱体减摇装置旋转;
[0050]
所述电动机,与圆柱体减摇装置传动杆和底座相连,用于提供传动杆旋转时所需要的动力;
[0051]
所述鳍型减摇装置传动杆,与鳍型减摇装置和底座相连,用于提供传动作用,使鳍型减摇装置产生非摆动的转动运动,从而改变攻角;
[0052]
所述底座,与鳍型减摇装置传动杆和电动机相连,用于提供衔接作用和支撑作用。
[0053]
为了可以更加清楚地说明现有技术中的技术方案,下面对传统减摇鳍、面积变形的平行四边形减摇鳍、以及magnus减摇装置的流体作用力产生机理和工作特性进行分析。
[0054]
如图2所示,传统减摇鳍的工作机理依赖船舶航行时较大的相对速度。通过控制攻角的大小,鳍的上下表面会在相对速度的作用下分别形成高速低压和低速高压的水流线,进而形成对抗海浪扰动所需要的抗横摇的流体作用力f
c
:
[0055][0056]
式中:ρ为流体密度,l1为传统减摇鳍的宽度,l3为传统减摇鳍的长度,v为船体与水流的相对速度,c
l
为传统减摇鳍在做攻角变换运动时的升力系数。
[0057]
从式(1)可以看出,传统减摇鳍产生的流体作用力的大小与来流速度的平方近似成正比,当来流速度较低甚至近似为零时会导致传统减摇鳍无法产生较大的流体作用力。所以在船舶处于低/零航速状态时,传统减摇鳍的减摇能力极差甚至不能减摇,且传统减摇鳍受限于额定攻角的大小,在任意航速下产生的流体作用力都会有一个限值,产生的流体作用力有时会不足以抵抗过大的横摇力。
[0058]
如图3所示,面积变形的平行四边形减摇鳍的工作机理依赖于通过主动拍动的工作方式来提供反向作用力。主动拍动的工作方式不受航速的影响,完善了面积变形的平行四边形减摇鳍在低/零航速下的减摇能力,但是在拍动过程中流体作用力的大小会随鳍角的改变而发生周期性的变化,面积变形的平行四边形减摇鳍形成的对抗海浪扰动所需要的抗横摇的流体作用力f
g
为:
[0059][0060]
式中:l1为面积变形的平行四边形减摇鳍的宽度,ρ为流体密度,c
d
为形状阻力系数,l3为面积变形的平行四边形减摇鳍的长度,c为鳍轴距首缘距离,k2为漩涡作用力系数,ω为转鳍角速度,α为转鳍角度,k1为附加质量力系数,d为1/4弦长的长度,为转鳍角速度的导数。
[0061]
从式(2)可以看出,在一个运动周期内流体作用力的大小会随鳍角的改变而发生周期性的变化,并非稳定增加或降低,使其不容易实现稳定的控制,且增加的有效投影面积是靠展开鳍面获得的,这同时也增加了减摇鳍工作时所受到的阻力,在一定程度上会给船舶航行增加能耗,带来了负面影响;
[0062]
如图4所示,magnus减摇装置通过主动旋转的方式来制造水流的流速差,其工作机理依赖于通过流速差产生的压强差来提供流体作用力。在船舶工作于低/零航速下,如图5所示,需通过主动摆动的工作方式来配合使用,但是摆动时所提供的流体作用力的方向会随摆动周期实时变化,给船舶造成了不利影响,而且因其工作时的有效投影面积较小,产生的流体作用力不够大,导致了magnus减摇装置的使用效率不够高,减摇效果不够好。
[0063]
本发明避免了上述减摇装置的问题、完善了减摇装置的性能,其中涉及的流体作用力的产生机理包括如下特征:
[0064]
本发明对传统减摇鳍进行了改进,在结构上,为鳍的前缘设计了一个圆柱体减摇装置,来代替原有的鳍头,如图6所示;本发明设计的圆柱体减摇装置可自主旋转,如图7所示;圆柱体减摇装置可理解为半径为r的圆柱以速度为v(沿x轴正方向)、旋转角速度ω在水中运动,根据运动相对性原理,可以认为圆柱只有旋转运动,而水流则以速度为v(沿x轴负
方向)相对于圆柱运动;
[0065]
在圆柱上平行于xoz平面任取一个截面s,如图8所示,在面s的圆周上任取一点a,通过圆心对应圆周另一侧b点;在圆柱旋转时由于粘性效应,圆柱柱面上的流体将会被带动着流动,其流动速度的大小可表示为:
[0066]
u=arω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0067]
式中:a为某一常数,它与圆柱表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,其值a≤1,r为圆柱的半径,ω为圆柱的转速;
[0068]
a点水流的合速度大小v
a
可用平行四边形法则求得:
[0069]
v
a2
=v2+u2+2vucos(90+θ)=v2+u2+2vusinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0070]
同理b点水流的合速度大小v
b
可用平行四边形法则求得:
[0071]
v
b2
=v2+u2+2vucos(90+θ)=v2+u2‑
2vusinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0072]
设a、b两点的压强分别为p
a
、p
b
,根据伯努利方程可得:
[0073][0074]
设a、b两点的压强差为δp1,则:
[0075][0076]
压强差δp1将在b,a两点的圆弧上产生线压力df,则df=δp1ds,因此作用力f可以表示为:
[0077][0078]
采用正交分解法,设f在垂直于水流方向(
‑
z方向)的作用力为f
‑
z
,由于ds=rdθ则:
[0079][0080]
下面讨论整个圆柱所受到的垂直于水流方向的作用力f
m
,只要对力f
‑
z
在y轴方向沿柱面积分便可;
[0081][0082]
式中:l1为圆柱体减摇装置的长度;
[0083]
上述推论表明:由于流体粘性效应,圆柱体减摇装置的柱面上的流体将会被带动着流动,流动的流体会使柱面两侧水流的速度不同进而产生压强差,由此压强差引起的压力的总效果将对圆柱体减摇装置产生一个垂直于水流方向的作用力f
m
,除了船舶工作于零航速状态,本发明的此部分作用力均可以根据需要来提供抵消海浪扰动所需要的流体作用力;
[0084]
同样的如图9所示,由于粘性效应,圆柱体减摇装置的柱面上的水流也会带动鳍型减摇装置表面的水流流动,当圆柱体减摇装置逆时针旋转时带动上表面的水流流动,当圆柱体减摇装置顺时针旋转时带动下表面的水流流动;
[0085]
举例当圆柱体减摇装置逆时针旋转时,受其影响后的c点的水流速度为:
[0086]
v
c
=v+u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0087]
d点的水流速度为:
[0088]
v
d
=v
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0089]
设c、d两点的压强分别为p
c
、p
d
根据伯努利方程可得:
[0090][0091]
设c、d两点的压强差分别为δp2,则:
[0092][0093]
式中:ρ为流体密度,a为某一常数,与圆柱体减摇装置表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,r为圆柱体减摇装置的半径,ω为圆柱体减摇装置的转速;
[0094]
压强差δp2将在c、d两点的产生线压力df,则df=δp2ds,所以在
‑
z方向上的作用力f
‑
z
为:
[0095][0096]
式中:l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度;
[0097]
下面讨论整个鳍型减摇装置表面所受到的垂直于水流方向(
‑
z方向)的作用力f
q
,只要对力在y轴方向沿鳍型减摇装置面积分便可;
[0098][0099]
式中:l1为圆柱体减摇装置的长度,l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度;
[0100]
当圆柱体减摇装置顺时针旋转时同理;
[0101]
上述推论表明:由于粘性效应,圆柱体减摇装置的柱面上的水流也会带动鳍型减摇装置表面的水流流动,当圆柱体减摇装置逆时针旋转时带动上表面的水流流动,当圆柱体减摇装置顺时针旋转时带动下表面的水流流动,将使得鳍型减摇装置的鳍面上下两侧的水流的速度不同进而产生压强差,由此压强差引起的压力的总效果将对鳍型减摇装置的鳍面产生一个垂直于水流方向的作用力f
q
,且因此部分作用力不受航速的影响,故而无论船舶工作于任何状态,本发明的此部分作用力均可以根据需要来提供抵消海浪扰动所需要的流体作用力。
[0102]
以下为具体实施例。
[0103]
依据船舶航行时的航速不同,可将其分为三种航行状态:中高速航行状态、低速航行状态、零速航行状态。依据上述航行状态可将本发明设置为三种工作模式,在三种工作模式下的流体作用力的产生方式和大小分别为:
[0104]
s1:如图10所示,当船体处于中高速航行状态时,设定本发明的工作模式为:鳍型减摇装置传动杆带动鳍型减摇装置做攻角变换运动,此时船体与水流的相对速度较大,可以只用传统减摇鳍通过改变攻角的方法来提供流体作用力,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0105][0106]
式中:f
c
为改变攻角所得到的流体作用力,ρ为流体密度,l1为圆柱体减摇装置的长度,l3为鳍型减摇装置的长度,v为船体与水流的相对速度,c
l
为鳍型减摇装置在做攻角变换运动时的升力系数;
[0107]
s2:如图11所示,当船体处于低速航行状态时,设定本发明的工作模式为:鳍型减摇装置传动杆带动鳍型减摇装置做攻角变换运动,同时圆柱体减摇装置传动杆带动圆柱体减摇装置做旋转运动,此时船体与水流的相对速度较小,通过改变攻角所得到的流体作用力较小,圆柱体减摇装置自主旋转的运动方式可以弥补流体作用力的不足,由于流体粘性效应,当圆柱体减摇装置旋转时,柱面上的水流会被带动着流动,而同时圆柱体减摇装置的柱面上的水流也会带动鳍型减摇装置表面的水流流动,当圆柱体减摇装置顺时针旋转时会带动鳍型减摇装置的下表面的水流流动,当圆柱体减摇装置逆时针旋转时会带动鳍型减摇装置的上表面的水流流动,流动的水流会使柱面两侧和鳍型减摇装置的鳍面上下两侧的水流的速度不同进而产生压强差,由此压强差引起的压力的总效果将分别对圆柱体减摇装置的柱面和鳍型减摇装置的鳍面产生一个垂直于水流方向的作用力,且当圆柱体减摇装置顺时针旋转时作用力方向向下,逆时针旋转时作用力方向向上,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0108][0109]
式中:f
m
为圆柱体减摇装置所受到的垂直于水流方向的作用力,f
q
为鳍型减摇装置表面所受到的垂直于水流方向的作用力,f
c
为改变攻角所得到的流体作用力,ρ为流体密度,a为某一常数,与圆柱体减摇装置表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,r为圆柱体减摇装置的半径,v为船体与水流的相对速度,ω为圆柱体减摇装置的转速,l1为圆柱体减摇装置的长度,l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度,l3鳍型减摇装置的长度,c
l
为鳍型减摇装置在做攻角变换运动时的升力系数;
[0110]
s3:如图12所示,当船体处于零速航行状态时,设定本发明的工作模式为:圆柱体减摇装置传动杆带动圆柱体减摇装置做旋转运动,此时船体与水流的相对速度为零,通过改变攻角并不会得到流体作用力,并且圆柱体减摇装置本身也将失去压强差从而无法提供流体作用力,但是圆柱体减摇装置表面流动的水流会带动鳍型减摇装置表面的水流流动,流体作用力将通过鳍型减摇装置表面的水流的流速差形成的压强差来产生,在此种工作模式下,本发明产生的用来抵消海浪扰动的流体作用力f为:
[0111][0112]
式中:f
q
为鳍型减摇装置表面所受到的垂直于水流方向的作用力,ρ为流体密度,a为某一常数,与圆柱体减摇装置表面的材质、粗糙度等特征以及流体的内摩擦和粘滞性有关,r为圆柱体减摇装置的半径,ω为圆柱体减摇装置的转速,l1为圆柱体减摇装置的长度,l2为受到圆柱体减摇装置转动影响的鳍型减摇装置的长度。
[0113]
上述内容仅为对现有技术方案的理论分析、对本发明一种适用于全航速的船用减摇装置在三种工作模式下的流体作用力的产生方式和大小的理论分析和理论对比。
[0114]
为了可以更加清楚地说明本发明与现有技术方案的不同,进一步表述所述一种适用于全航速的船用减摇装置的新颖性、创造性和实用性,现以某一实际应用的传统减摇鳍的鳍型为参考,利用origin软件对所述一种适用于全航速的船用减摇装置进行数值汇总,汇总后的本发明与现有技术方案的升力变化对比曲线如图13所示。
[0115]
下面将结合相关数值参数列表、图13对本发明一种适用于全航速的船用减摇装与现有技术方案进行具体分析,分析的内容主要是在不同工况下对有关升力变化的原因进行总结。
[0116]
参考某一实际应用的传统减摇鳍的鳍型参数设置,本发明实施例用到的相关数值参数如表1所示。
[0117]
表1.实施例的主要参数
[0118][0119]
需要说明的是:用航速v取值v1、v2、v3来分别表述计算的工况为中/高航速、低航速、零航速;设定圆柱体减摇装置为逆时针旋转,分别计算了当圆柱体减摇装置转速ω为5rad/s、10rad/s、15rad/s、20rad/s时在每种工况下本发明所得到的升力大小;图13中的传统减摇鳍在不同工况下的升力均是按照上述表1中的参数计算而得,并不受到转速ω的影响,仅作对比参照使用。
[0120]
从图13可以看出:本发明在低航速和零航速工况下的升力随转速的增加而提高,且在低航速下的增长的斜率更大;因为本发明设定了在工况为中/高航速时的工作方式与传统减摇鳍相同,所以在中/高航速下二者提供的升力相同;传统减摇鳍在工况为低航速时的升力较小,减摇能力较弱;传统减摇鳍在工况为零航速时的升力为零,减摇能力为零。
[0121]
分析变化趋势可以发现:在工况为零航速时,本发明通过圆柱体减摇装置的旋转所融合的新的流体作用力的产生方式可以有效的增加减摇能力,这是因为转速不受航速的影响,只要转速增大,产生的流体作用力的就会增加,解决了传统减摇鳍在工况为零航速时减摇能力基本为零的缺点;在工况为低航速时,本发明相比于传统减摇鳍也有着不错的减摇能力,在本发明的转速ω为5rad/s、10rad/s、15rad/s、20rad/s时,升力分别提升了162.85%、420.14%、755.02%、1269.54%,使本发明在低航速时的减摇能力得到大幅度的提升,解决了传统减摇鳍在工况为低航速时减摇能力较弱的缺点;同时升力在低航速下的
增长斜率比零航速下的更大的原因是本发明在低航速时产生的流体作用力受转速的影响更为强烈。
[0122]
综上所述:本发明新装载的圆柱体减摇装置对传统减摇鳍的鳍头形状修改并不大,在一定程度上保留了原有鳍头的流线型结构,不会过分的增加阻力;此外从式(17)、式(18)、式(19)可以发现,流体作用力不会发生周期性变化,控制起来更为方便和稳定;且融合的这种新的提供流体作用力的方式所产生的流体作用力f
m
和f
q
的大小受圆柱体减摇装置转速的影响,理论上只要转速足够大,所产生的用来抵抗更大的横摇力的流体作用力就足够大,这解决了传统减摇鳍受限于额定攻角的大小,产生的流体作用力会有一个限值的问题;在船舶处于零航速时,本发明也可以提供用来抵消海浪扰动所需要的流体作用力f
q
,本发明具备全航速减摇的能力,传统减摇鳍在低/零航速时的减摇效果极差甚至不能减摇的缺陷被消除;相比于船用magnus减摇装置,本发明因为鳍型减摇装置的存在,使其工作时有效投影面积增大,进而使其在相同能耗下的使用效率和流体作用力提高,并且得益于本发明鳍型减摇装置传动杆只做转动运动而不做摆动运动,避免了因鳍轴周期性摆动改变流体作用力方向而给船舶造成的不利影响;本发明设定了三种工作模式,尤其在中/高航速下只用传统减摇鳍通过改变攻角的方法来提供流体作用力,这保证了本发明可以在不耗费过多能源的前提下来具备兼顾全航速的减摇能力,具有更为良好的使用价值。
[0123]
以上实施例仅用于说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明的技术方案进行了详细说明,本领域技术人员应当理解,可以对所描述的具体实施例作各种修改、补充或采用类似的方法替代,但并不会偏离本发明的精神或超越所附权利要求书所定义的范围。