1.本实用新型涉及水下机器人设备技术领域,具体为一种可智能避障的水下机器人。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
3.现有技术存在以下问题:
4.1、现有的水下机器人在遇到凹凸不平的区域时,还是会跟随水流进行运行,这样就会导致机器人在凹凸不平的区域内,会受到磕磕碰碰;
5.2、现有的水下机器人在遇到突发撞击的情况下,不会自主的进行后续的避让。
技术实现要素:
6.针对现有技术的不足,本实用新型提供了一种可智能避障的水下机器人,解决了现今存在遇到凹凸不平的区域时,还是会跟随水流进行运行,这样就会导致机器人在凹凸不平的区域内,会受到磕磕碰碰,遇到突发撞击的情况下,不会自主的进行后续的避让的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种可智能避障的水下机器人,包括设备主体,所述设备主体的中心转动连接有驱动齿轮,所述设备主体的外围固定安装有防撞板,所述设备主体的内部固定连接有内壳。
8.作为本实用新型的一种优选技术方案,所述驱动齿轮的外围转动连接有从动轮以及传动齿轮,所述传动齿轮远离驱动齿轮的一端转动连接有转动螺杆,所述转动螺杆的正面转动连接有升降螺纹块,所述升降螺纹块的外围滑动连接有水槽,所述水槽的背面固定安装有输水管,所述输水管远离水槽的一端转动连接有机动风轮,所述机动风轮的外围转动连接有风轮框。
9.作为本实用新型的一种优选技术方案,所述防撞板靠近设备主体的一端固定安装有固定轴以及拉伸弹簧,所述固定轴的正面固定连接有拉伸线,所述拉伸线远离固定轴的一端固定连接有滑块。
10.作为本实用新型的一种优选技术方案,所述从动轮远离驱动齿轮的一端转动连接有风轮框,且从动轮在驱动齿轮的外围有三组,每组从动轮的外围的风轮框有两组。
11.作为本实用新型的一种优选技术方案,所述输水管连接水槽与风轮框。
12.作为本实用新型的一种优选技术方案,所述固定轴的正面连接有两组拉伸线,且每组拉伸线连接有一组滑块。
13.作为本实用新型的一种优选技术方案,所述滑块在设备主体的内壁与内壳的外壁滑动连接。
14.与现有技术相比,本实用新型提供了一种可智能避障的水下机器人,具备以下有
益效果:
15.1、该一种可智能避障的水下机器人,通过设置驱动齿轮,通过降螺纹块会受到水流的冲击,在转动螺杆上更加快速的进行升降运动,带输水管内部的水流到达机动风轮上时,更加的快速,此时受到冲击的两组机动风轮转速加快,带动设备主体快速的躲避,从而达到了智能避障的效果。
16.2、该一种可智能避障的水下机器人,通过设置防撞板,通过防撞板受到撞击后,会在拉伸弹簧的作用下,向设备主体的内部移动,同时,固定轴正面的两组拉伸线也会向设备主体的内部运动,两组滑块会在设备主体的内壁与内壳的外围进行滑动,将设备主体的中心进行偏移远离撞击的一侧,从而达到了防止撞击的效果。
附图说明
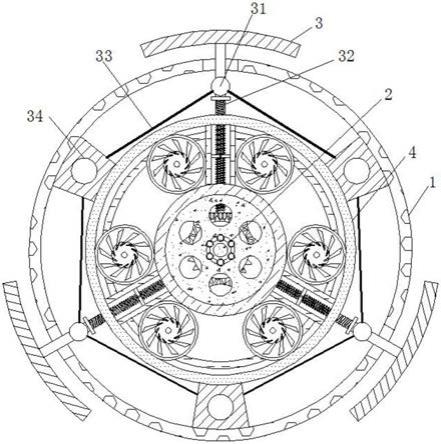
17.图1为本实用新型正视图;
18.图2为本实用新型设备主体及其连接结构示意图;
19.图3为本实用新型驱动齿轮及其连接结构示意图;
20.图4为本实用新型转动螺杆及其连接结构示意图。
21.图中:1、设备主体;2、驱动齿轮;21、从动轮;22、传动齿轮;23、转动螺杆;24、升降螺纹块;25、水槽;26、输水管;27、机动风轮;28、风轮框;3、防撞板;31、固定轴;32、拉伸弹簧;33、拉伸线;34、滑块;4、内壳。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-4,本实施方案中:一种可智能避障的水下机器人,包括设备主体1,设备主体1的中心转动连接有驱动齿轮2,设备主体1的外围固定安装有防撞板3,设备主体1的内部固定连接有内壳4。
24.本实施例中,驱动齿轮2的外围转动连接有从动轮21以及传动齿轮22,传动齿轮22远离驱动齿轮2的一端转动连接有转动螺杆23,转动螺杆23的正面转动连接有升降螺纹块24,升降螺纹块24的外围滑动连接有水槽25,水槽25的背面固定安装有输水管26,输水管26远离水槽25的一端转动连接有机动风轮27,机动风轮27的外围转动连接有风轮框28。防撞板3靠近设备主体1的一端固定安装有固定轴31以及拉伸弹簧32,固定轴31的正面固定连接有拉伸线33,拉伸线33远离固定轴31的一端固定连接有滑块34。从动轮21远离驱动齿轮2的一端转动连接有风轮框28,且从动轮21在驱动齿轮2的外围有三组,每组从动轮21的外围的风轮框28有两组,起到每组从动轮21带动两组风轮框28进行转动的效果。输水管26连接水槽25与风轮框28,起到设备主体1内部的六组风轮框28共同贯通的效果。固定轴31的正面连接有两组拉伸线33,且每组拉伸线33连接有一组滑块34,起到每组滑块34上的两组拉伸线33在设备主体1的内部相互限制三组防撞板3的效果。滑块34在设备主体1的内壁与内壳4的外壁滑动连接,起到跟随设备主体1的造型进行运动的效果。
25.本实用新型的工作原理及使用流程:操作者通过驱动齿轮2来带动外围的从动轮21以及传动齿轮22的转动,从动轮21带动外围的两组风轮框28进行转动,且风轮框28内部的机动风轮27跟随风轮框28的转动,在配合转动螺杆23跟随传动齿轮22的转动,带动正面升降螺纹块24在水槽25的内部,将外界的水不断地抽吸到输水管26的内部,而输水管26由于风轮框28相互连接,所以输水管26内部的水会在机动风轮27的转动下,带动整体设备主体1在水下平稳的运行,而在水下的环境是不确定的,在遇到一些凹凸不平的区域时,水流会在凹凸不平的区域的流动会更加的快速,在水槽25内部的升降螺纹块24会受到水流的冲击,在转动螺杆23上更加快速的进行升降运动,带输水管26内部的水流到达机动风轮27上时,更加的快速,此时受到冲击的两组机动风轮27转速加快,带动设备主体1快速的躲避,从而达到了智能避障的效果,而在水下遇到一些跟随水流运动的物体时,设备主体1外围的防撞板3会在第一时间受到撞击,防撞板3受到撞击后,会在拉伸弹簧32的作用下,向设备主体1的内部移动,同时,固定轴31正面的两组拉伸线33也会向设备主体1的内部运动,两组滑块34会在设备主体1的内壁与内壳4的外围进行滑动,将设备主体1的中心进行偏移远离撞击的一侧,从而达到了防止撞击的效果。
26.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。