一种用于圆筒型fpso调头转向的方法
技术领域
1.本发明涉及一种用于圆筒型fpso调头转向的方法。
背景技术:
2.目前,主要是针对船型结构fpso的转头调向,由于在拖带和方位转变的过程中,相对于圆筒型结构,拖轮可以采取帮靠或者顶推船型结构的方式进行fpso的调向作业,这样船型结构fpso转向过程更加容易控制,调向操作相对安全可靠。
3.但对于圆筒型结构fpso的调向操作,由于整体为筒状形,拖轮无法采取帮靠或者顶推的方式来控制方位,只能采用缆绳拖带的方式,这样造成圆筒型fpso在水中方位难以控制,在海况不理想的情况下,极易产生轴向旋转,增加船体方位以及运动轨迹的掌控难度和施工风险。
技术实现要素:
4.本发明提供了一种用于圆筒型fpso调头转向的方法,能够对圆筒型fpso进行转向。
5.为了解决上述技术问题,本发明提供了一种用于圆筒型fpso调头转向的方法,通过以下步骤实现:s1、由三条拖轮将圆筒型fpso从出发点拖带至宽阔水域,并使圆筒型fpso保持稳定状态;s2、改变拖带缆在拖轮与圆筒型fpso之间的连接方式;s3、统一指挥三条拖轮,使拖轮带动圆筒型fpso转动至指定方位;s4、由拖轮将圆筒型fpso回拖至出发点,即完成圆筒型fpso调头转向。
6.进一步的,步骤s1包括:s11、在圆筒型fpso上预制拖轮带缆位置,并在带缆位置上连接尼龙缆;s12、拖轮向外引出拖缆,拖缆与尼龙缆通过卡环连接成拖带缆,其中拖轮a引出两条拖带缆与圆筒型fpso连接;s13、在拖轮c和拖轮b的方位控制下,由拖轮a将圆筒型fpso拖至宽阔水域,然后由三条拖轮让圆筒型fpso保持稳定状态。
7.进一步的,步骤s2具体为:解除拖轮a与圆筒型fpso之间的1根拖带缆,在圆筒型fpso转向完成之前,更靠近出发点的拖轮与圆筒型fpso之间设置两根拖带缆。
8.进一步的,步骤s3具体为:在指挥中心的统一指挥下,更靠近出发点的拖轮带动圆筒型fpso完成转向,另两条拖轮保持圆筒型fpso的平衡,圆筒型fpso到达指定方位,即完成圆筒型fpso调头转向。
9.本发明的技术效果为:本发明采用三条拖轮对圆筒型fpso进行转向,在拖轮b和拖轮c的方位控制下,由拖轮a将圆筒型fpso拖拽至宽阔水域,然后改变拖带缆与圆筒型fpso之间的连接方式,在指挥中心的统一指挥下,由更靠近出发点的拖轮,拖动圆筒型fpso完成
转向,本发明使得圆筒型fpso在水中的方位调整更加容易控制,即使在海况不理想的情况下,也不容易产生轴向旋转,降低了船体方位以及运动轨迹的掌控难度和施工风险。
附图说明
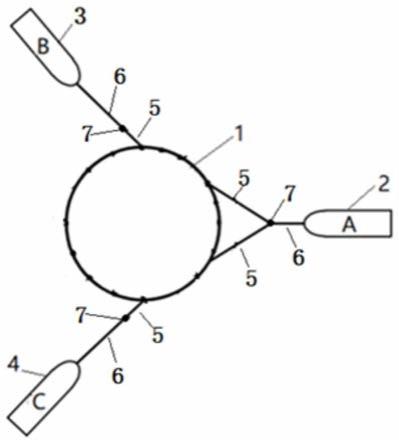
10.图1为本发明中拖轮a拖行圆筒型fpso的俯视图。
11.图2为本发明拖轮通过拖带缆与圆筒型fpso连接的俯视图。
12.图3为本发明中圆筒型fpso在转向之前的俯视图。
13.图4为本发明中拖轮带动圆筒型fpso进行转向的俯视图。
14.附图标记:1、圆筒型fpso; 2、拖轮a;3、拖轮b;4、拖轮c;5、尼龙缆;6、拖缆;7、卡环。
具体实施方式
15.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
16.实施例,如图1到图4所示,一种用于圆筒型fpso调头转向的方法,能够将圆筒型fpso1在宽阔水域内进行平稳转向,调整更加容易控制,即使在海况不理想的情况下,也不容易产生轴向旋转,降低了船体方位以及运动轨迹的掌控难度和施工风险。每一步的具体实施如下:s1、由三条拖轮将圆筒型fpso1从出发点拖带至宽阔水域,并使圆筒型fpso1保持稳定状态;步骤s1具体可以细化成以下步骤:s11、在圆筒型fpso1上预制拖轮带缆位置,并在带缆位置上连接尼龙缆5;带缆位置位于圆筒型fpso1的侧面,共设置6个带缆位置,分成3组,每组之间周向间隔的角度为120
°
。
17.s12、拖轮向外引出拖缆6,拖缆6与尼龙缆5通过卡环7连接成拖带缆,其中拖轮a2引出两条拖带缆与圆筒型fpso1连接;拖缆6和尼龙缆5两者通过卡环7连接组成一条拖带缆,其中拖缆6连接拖轮,尼龙缆5连接圆筒型fpso1。
18.s13、在拖轮c4和拖轮b3的方位控制下,由拖轮a2将圆筒型fpso1拖至宽阔水域,然后由三条拖轮让圆筒型fpso1保持稳定状态。
19.拖轮将圆筒型fpso拖动到达宽阔水域后,拖轮b3和拖轮c4能够通过对拖带缆保持适当的拉力来保证圆筒型fpso1的稳定性。
20.s2、改变拖带缆在拖轮与圆筒型fpso1之间的连接方式;步骤s2具体为:解除拖轮a2与圆筒型fpso1之间的1根拖带缆,在圆筒型fpso1转向完成之前,更靠近出发点的拖轮与圆筒型fpso1之间设置两根拖带缆。
21.在改变拖带缆在拖轮和圆筒型fpso1之间的连接方式时,需要现场工作人员判断,具体是拖轮b3或拖轮c4更靠近出发点。在本实施例中,以拖轮b3更靠近出发点来进行具体说明。s3、统一指挥三条拖轮,使拖轮带动圆筒型fpso1转动至指定方位;
在指挥中心的统一指挥下,更靠近出发点的拖轮带动圆筒型fpso1完成转向,另两条拖轮保持圆筒型fpso1的平衡,圆筒型fpso1到达指定方位,即完成圆筒型fpso调头转向。
22.在步骤s3中,拖轮c4和拖轮a2进行方位控制时,主要是防止圆筒型fpso1倾倒,起到稳定圆筒型fpso1的作用。在对圆筒型fpso1转动时,转动的动力来自于拖轮b3。拖轮c4和拖轮a2也会在圆筒型fpso1转动时,进行相适应的转动,并对拖带缆保持一定的拉力,以保证圆筒型fpso1的稳定。
23.s4、由拖轮将圆筒型fpso1回拖至出发点,即完成圆筒型fpso1调头转向。
24.由拖轮b3带动圆筒型fpso1回到出发点,在回拖的过程中,拖轮a2和拖轮c4保持圆筒型fpso1的稳定状态。
25.本发明具体通过以下步骤完成:(1)在圆筒型fpso1的四周选择合适带缆位置,并在每个带缆位置上连接高强度尼龙缆5;(2)如图1所示,拖轮向外引出拖缆6,拖缆6与尼龙缆5通过卡环7进行连接,两者组成拖带缆,其中拖轮b3和拖轮c4通过一条拖带缆连接圆筒型fpso1,拖轮a2通过两条拖带缆连接至圆筒型fpso1,形成“八”字的连接形式;(3)指挥中心统一协调指挥拖轮a2、拖轮b3及拖轮c4,在拖轮b3和拖轮c4对圆筒型fpso1的方位控制下,由拖轮a2拖行圆筒型fpso1至指定的宽阔水域;(4)圆筒型fpso1到达指定宽阔水域后,使用带缆小艇将拖轮a2上的一根拖带缆解除,同时在拖轮b3上连接两根拖带缆,两根拖带缆形成“八”字形的连接形式;(5)指挥中心统一指挥协调拖轮a2、拖轮b3及拖轮c4,其中拖轮a2和拖轮c4进行方位控制,拖轮b3带动圆筒型fpso1转动到指定位置。
26.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。