用于rov的水上作业平台
技术领域
1.本实用新型涉及rov设计领域,尤其涉及一种用于rov的水上作业平台。
背景技术:
2.rov,即遥控无人潜水器,是用于水下观察、检查和施工的水下机器人。随着海洋开发技术的快速发展、海洋资源的深入挖掘与利用,rov的应用愈加广泛。
3.但是,rov受限于自身体积等特性,难以前往离岸较远的水域作业,这极大的限制了rov的使用范围。
技术实现要素:
4.本实用新型提供一种用于rov的水上作业平台,以解决上述问题。
5.一种用于rov的水上作业平台,包括:本体、双向撑拉装置、回收布放装置和rov;
6.所述本体包括浮力筏,所述浮力筏设有动力装置和架体;
7.所述双向撑拉装置包括绞车、缆绳、第一滑轮、第一压紧轮和第二压紧轮,所述缆绳一端缠绕于所述绞车上,另一端绕过所述第一滑轮、穿过所述第一压紧轮和第二压紧轮之间后,与所述rov连接,所述第一压紧轮与第一电机连接,所述第一滑轮为动滑轮,且与第一弹性件连接;
8.所述回收布放装置包括设于所述架体上的升降架和设于所述升降架下端的第一连接部和第三连接部,所述第一连接部用于与所述架体上的第二连接部连接,所述第三连接部用于与所述rov上的第四连接部连接;
9.所述第一压紧轮和第二压紧轮均设于所述升降架下端。
10.进一步地,所述浮力筏具有两个,两个所述浮力筏的艉部设有连接杆;
11.所述动力装置包括推进器和安装杆,所述安装杆一端固定于所述浮力筏艉部,另一端设有所述推进器;
12.所述架体包括设于所述浮力筏上的竖向部和设于所述竖向部之间的横向部。
13.进一步地,所述架体包括竖向部和设于所述竖向部之间的横向部,所述绞车设于所述横向部下方;
14.所述竖向部之间设有横梁,所述横梁上设有固定架,所述固定架上设有门架,所述门架包括门架立柱和设于所述门架立柱之间的门架横梁,所述第一滑轮通过所述第一弹性件连接于所述门架横梁上,所述第一弹性件与所述门架之间设有拉力传感器,所述门架立柱设有门架滑槽,所述第一滑轮沿所述门架滑槽运动。
15.进一步地,所述固定架包括固定顶架和固定底架,所述固定顶架上设有第二滑轮,所述固定底架设有第三滑轮,所述第一滑轮、第二滑轮和第三滑轮设于同一平面内,所述缆绳穿过所述第二滑轮和第三滑轮之间后绕过所述第一滑轮。
16.进一步地,所述固定架上设有第四滑轮和第五滑轮,所述第一滑轮、第四滑轮和第五滑轮设于同一平面内,所述第四滑轮与第二电机连接,所述缆绳绕过所述第一滑轮后,依
次穿过所述第四滑轮和第五滑轮之间、所述第一压紧轮和第二压紧轮之间。
17.进一步地,所述升降架包括升降架体和设于所述升降架体底端的连接架,所述连接架上设有所述第一连接部;
18.所述第一连接部包括第一连接杆和第一圆环,所述第一圆环通过所述第一连接杆设于所述连接架上,所述架体上设有横梁,所述第二连接部包括第二连接杆和第二圆环,所述第二圆环通过所述第二连杆设于所述横梁下,所述第一圆环可通过升高与所述第二圆环同轴;
19.所述横梁下设有电动推杆,所述电动推杆的推杆与所述第二圆环同轴。
20.进一步地,所述第三连接部包括驱动部,连杆和抓手,所述第四连接部包括rov连接杆和设于所述rov连接杆一端的连接球,所述缆绳穿过所述连接球并与所述连接球固定连接,所述抓手包括两个弧形的抓手部,所述抓手部铰接在所述连接架下,所述连杆一端铰接于所述抓手部,另一端铰接于所述驱动部,所述缆绳穿过两个所述抓手部之间。
21.进一步地,所述驱动部包括电动气缸,所述电动气缸的活塞端与所述连杆铰接。
22.进一步地,所述升降架体包括第一升降架、第二升降架和第三升降架,所述第一升降架固定于所述架体上,所述第二升降架通过导轨和滑块与所述第一升降架连接,所述第三升降架通过导轨和滑块与所述第二升降架连接,所述第三升降架下端设有所述连接架。
23.进一步地,所述架体上设有岸机通信箱,所述岸机通信箱通过所述缆绳与所述rov连接。
24.本实用新型公开的一种用于rov的水上作业平台,可以回收和布放rov。水上作业平台可带动回收状态的rov航行至指定作业区域,然后释放rov,并在rov作业结束后,回收rov,使rov的作业区域从靠近海岸的水域向远处扩展。而且,在回收和布放的过程中,连接rov的缆绳可以保持张紧状态,避免缆绳绞在一起,影响rov的收放。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
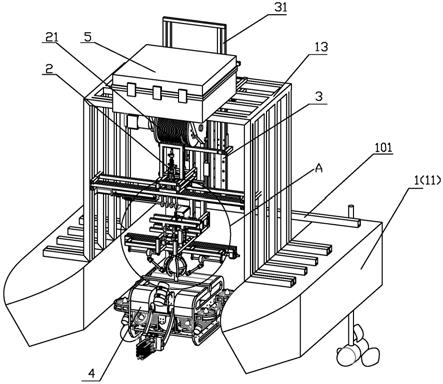
26.图1为本实用新型实施例中用于rov的水上作业平台的结构示意图;
27.图2为图1中a部分的放大图;
28.图3为本实用新型实施例中用于rov的水上作业平台的剖视示意图;
29.图4为图3中b部分的放大图;
30.图5为本实用新型实施例中用于rov的水上作业平台的主视示意图;
31.图6为图5中c部分的放大图;
32.图7为本实用新型实施例中双向撑拉装置的结构示意图。
33.图中:
34.1、本体;11、浮力筏;12、动力装置;13、架体;101、连接杆;102、推进器;103、安装杆;104、竖向部;105、横向部;106、横梁;107、固定架;108、门架;109、门架立柱;110、门架横梁;111、门架滑槽;112、固定底架;113、固定顶架;114、第二电机;
35.2、双向撑拉装置;21、绞车;22、缆绳;23、第一滑轮;24、第一压紧轮;25、第二压紧轮;26第一电机;27、第一弹性件;28、拉力传感器;201、第二滑轮;202第三滑轮;203、第四滑轮;204、第五滑轮;
36.3、回收布放装置;31、升降架;32、第一连接部;33、第三连接部;34、第二连接部;301、升降架体;302、连接架;303、第一连接杆;304、第一圆环;305、第二连杆;306、第二圆环;307、电动推杆;308、驱动部;309、连杆;310、抓手部;311、第一升降架;312、第二升降架;313、第三升降架;
37.4、rov;41、第四连接部;401、rov连接杆;402、连接球;
38.5、岸机通信箱。
具体实施方式
39.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
40.如图1所示,一种用于rov的水上作业平台,包括:本体1、双向撑拉装置2、回收布放装置3和rov4;
41.所述本体1包括浮力筏11,所述浮力筏11设有动力装置12和架体13;
42.所述双向撑拉装置2包括绞车21、缆绳22、第一滑轮23、第一压紧轮24和第二压紧轮25,所述缆绳22一端缠绕于所述绞车21上,另一端绕过所述第一滑轮23、穿过所述第一压紧轮24和第二压紧轮25之间后,与所述rov4连接,所述第一压紧轮24与第一电机26连接,所述第一滑轮23为动滑轮,且与第一弹性件27连接;
43.所述回收布放装置3包括设于所述架体13上的升降架31和设于所述升降架31下端的第一连接部32和第三连接部33,所述第一连接部32用于与所述架体13上的第二连接部34连接,所述第三连接部33用于与所述rov4上的第四连接部41连接。
44.本实用新型公开的用于rov的水上作业平台,可以回收和布放rov。水上作业平台可带动回收状态的rov航行至指定作业区域,然后释放rov,并在rov作业结束后,回收rov,使rov的作业区域从靠近海岸的水域向远处扩展。而且,在回收和布放的过程中,连接rov的缆绳可以保持张紧状态,避免缆绳绞在一起,影响rov的收放。
45.如图2所示,出海时,rov通过第三连接部33和第四连接部41与升降架31连接,升降架通过第一连接部32和第二连接部34与架体连接,使架体承受rov的重量,避免rov的重量长时间由绞车和缆绳承受,一方面由驾车和缆绳悬吊rov航行的稳定性差,非常容易摇晃,另一方面,过长时间使绞车和缆绳处于工作状态,容易产生故障。布放rov时,第一连接部32与第二连接部34分离,第三连接部33和第四连接部41分离,绞车释放缆绳,使rov进入水中。
46.所述第一压紧轮24和第二压紧轮25均设于所述升降架31的下端,rov处于非工作状态,即没有脱离作业平台时,升降架升至高位,使rov脱离水面。释放rov时,绞车工作,释放缆绳,同时第一电机26驱动第一压紧轮24转动,第一压紧轮24和第二压紧轮25配合,保持绞车与压紧轮之间缆绳的张紧状态。升降架下端下降,使缆绳从第一压紧轮24和第二压紧
轮25之间伸出后,即进入水中,缆绳在水中,在水的阻力的作用下,不会发生缠绕。
47.本实施例中,所述浮力筏11具有两个,两个所述浮力筏11的艉部设有连接杆101;连接杆101为高强度方形钢管,将两个浮力筏11连接在一起。
48.所述动力装置12包括推进器102和安装杆103,所述安装杆103一端固定于所述浮力筏11艉部,另一端设有所述推进器;浮力筏内设有电池和电机,用于驱动所述推进器102。
49.所述架体13包括设于所述浮力筏11上的竖向部104和设于所述竖向部104之间的横向部105,所述绞车21设于所述横向部105下方;
50.如图3
‑
7所示,所述竖向部104之间设有横梁106,所述横梁106上设有固定架107,所述固定架107上设有门架108,所述门架108包括门架立柱109和设于所述门架立柱109之间的门架横梁110,所述第一滑轮23通过所述第一弹性件27连接于所述门架横梁110上,所述第一弹性件27与所述门架108之间设有拉力传感器28,所述门架立柱109设有门架滑槽111,所述第一滑轮23沿所述门架滑槽111运动。
51.第一弹性件27为弹簧,当绞车工作,释放或回收缆绳时,弹簧发送形变,保持缆绳的张紧状态,同时拉力发生变化,拉力传感器28检测到拉力变化,将信号传递给控制单元,控制单元发送信号给第一电机26,第一电机驱动压紧轮转动,避免弹簧的形变超出范围,出现弹簧或缆绳的损坏,或者缆绳无法张紧,发生绞缠。
52.所述固定架107包括固定顶架113和固定底架112,所述固定顶架111上设有第二滑轮201,所述固定底架112设有第三滑轮202,所述第一滑轮23、第二滑轮201和第三滑轮202设于同一平面内,所述缆绳22穿过所述第二滑轮201和第三滑轮202之间后绕过所述第一滑轮23。
53.所述固定底架112上设有第四滑轮203和第五滑轮204,所述第一滑轮23、第二滑轮201、第三滑轮202、第四滑轮203和第五滑轮204均设于同一平面内,所述第四滑轮203与第二电机114连接,所述缆绳22绕过所述第一滑轮23后,依次穿过所述第四滑轮203和第五滑轮204之间、所述第一压紧轮24和第二压紧轮25之间。
54.缆绳22从绞车伸出后,绕第二滑轮201,第三滑轮202与第二滑轮201配合,压紧缆绳,然后缆绳绕过第一滑轮23,由于第一滑轮23是动滑轮,所以,随着第一滑轮的活动,可以在一定范围内调节缆绳的张紧状态。然后,缆绳绕过第四滑轮203,第五滑轮204与第四滑轮203配合,压紧缆绳。第五滑轮204与第二电机114连接,第二电机114驱动第五滑轮转动,避免缆绳在滑轮间阻力过大,使缆绳的运动更顺畅。第四滑轮203与固定底架112之间设有弹簧,避免绞车瞬时动作时,对缆绳产生较大拉力,造成缆绳损坏,起到缓冲的作用。缆绳从第四滑轮和第五滑轮之间伸出后,进入第一压紧轮和第二压紧轮之间,在第一压紧轮和第二压紧轮的牵引下运动。
55.所述升降架31包括升降架体301和设于所述升降架体301底端的连接架302,所述连接架302上设有所述第一连接部32;
56.所述第一连接部32包括第一连接杆303和第一圆环304,所述第一圆环304通过所述第一连接杆303设于所述连接架302上,所述架体13上设有横梁106,所述第二连接部34包括第二连接杆305和第二圆环306,所述第二圆环306通过所述第二连杆305设于所述横梁106下,所述第一圆环304可通过升高与所述第二圆环306同轴;
57.所述横梁106下设有电动推杆307,所述电动推杆307的推杆与所述第二圆环306同
轴。
58.本实施例中,第一圆环304共有两个,第二圆环306共有四个,两个第一圆环304可运动至四个第二圆环306之间,电动推杆307的推杆伸入第一圆环和第二圆环,使升降架通过第一圆环、第二圆环和推杆,连接在架体上,避免升降架长时间受力。
59.所述第三连接部33包括驱动部308,连杆309和抓手,所述第四连接部41包括rov连接杆401和设于所述rov连接杆401一端的连接球402,所述缆绳22穿过所述连接球402并与所述连接球402固定连接,所述抓手包括两个弧形的抓手部310,所述抓手部310铰接在所述连接架302下,所述连杆309一端铰接于所述抓手部310,另一端铰接于所述驱动部308,所述缆绳22穿过两个所述抓手部310之间。
60.所述驱动部308包括电动气缸,所述电动气缸的活塞端与所述连杆309铰接。驱动部308不限于电动气缸,可沿直线驱动的装置即可。
61.驱动部308驱动连杆309的一端运动,连杆309的另一端随之运动,同时,带动两个弧形的抓手部310张开或闭合,连接球402可进入或离开两个抓手部310之间的空间,完成释放或抓取rov的动作。
62.所述升降架体301包括第一升降架311、第二升降架312和第三升降架313,所述第一升降架311固定于所述架体13上,所述第二升降架312通过导轨和滑块与所述第一升降架311连接,所述第三升降架313通过导轨和滑块与所述第二升降架312连接,所述第三升降架313下端设有所述连接架302。
63.所述架体13上设有岸机通信箱5,所述岸机通信箱5通过所述缆绳22与所述rov连接。
64.岸机通信箱位于架体的顶部,箱内主要由总控制台、通信设备、工控机、导航设备、声纳、雷达组成,其主要作用是连接水上作业平台与岸边地面站的通信,以及作为岸边操作人员完成对整个回收布放平台的控制和半自主控制的平台信息处理中心。gps主要是在人机协同操作或半自主操作时,使回收布放平台的经纬度信息能实时被岸边操作人员掌握,以便控制水上作业平台在作业完成后通过控制或自主返回岸边,且rov在潜水作业后能根据回收布放平台的定位信息通过导航算法自主返回到平台附近。
65.本实用新型公开的用于rov的水上作业平台工作过程如下:
66.地面站综合监控系统集成了回收布放控制系统、rov控制系统和水面无人艇控制系统,水面无人艇控制系统用于控制浮力筏,是整个回收布放平台在地面的信息中心。岸基通信箱作为艇上信息处理中心是地面站与水面无人艇的信号收发中枢,同时提供rov与远程控制的信号传输。当rov需要出海作业时,水上作业平台携带rov快速驶到作业区域,在水面无人艇行驶过程中,rov是固定在架体上的,此时缆绳无负荷,到达作业区域的途径有两种形式,一种由地面操控人员通过水面无人艇控制系统和导航系统将rov开到指定区域工作,另一种通过半自主方式由地面操控人员设好指定终点然后一键启动水面无人艇自动行驶到指定区域。到达指定工作区域后,通过回收布放控制系统启动绞车,绞车顺时针转动1度停止,电动推杆缩回,推杆缓缓移出圆环,此时整个rov重量落在缆绳上,再次启动绞车逆时针转动,rov缓缓降落,升降架随rov同时向下移动,使rov下降并进入水中至rov上表面与水面平行,整个下降过程中,由于水面无人艇受波浪影响会造成剧烈晃动,整个升降装置通过球型锁与rov球形钩的软连接起到了减轻rov晃动的作用,尽可能保障rov在下降过程中
与水面无人艇保持同步状态,升降装置停止下降后,其半球型锁在两侧的水平牵引装置控制下慢慢打开,此时的rov仅通过缆绳与回收布放平台保持连接,然后通过回收布放控制系统内的开关控制绞车逆时针转动松绳,最后通过rov控制系统控制rov下海作业,此时的缆绳担负rov与回收平台的信号传输及供电任务,当rov作业完毕后,rov会利用自身安装的gps自动导航系统驶向回收平台,至以回收平台为圆心半径2米的圆形区域范围,当rov回到监控区域内后,岸机通信箱自动向地面站综合监控系统发送信号提示rov已回到归位区,之后通过回收布放系统启动绞车,顺时针转动收绳,收绳的过程可以分两种方式,一种由地面操控人员通过水上作业平台携带的摄像头,一边观察一边收绳,直至rov的连接球进入抓手部中,另一种方式为通过计算放出的缆绳长度绞车自动转到相应角度后停止,最后由抓手部锁住rov上的连接球,绞车顺时针转动紧绳,带动升降架上升,缆绳带动升降架上升,使第一圆环和第二圆环同轴时,绞车停止工作,电动推杆插入圆环中,绞车再次启动逆时针转动1度停止,此时rov的重量全部落到推杆上,自此岸机通信箱给地面站综合监控系统发送信号回收操作完毕,水面无人艇在无人艇控制系统操控下回到岸边,两种返回方式同出海作业相同。
67.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。