1.本发明涉及一种水下机器人,尤其涉及一种多环境水下智能巡检机器人。
背景技术:
2.目前,专业级的水下机器人世界中,基本上分为两种类型:对执行检查任务有好处的遥控无人潜水器(rov)和更适合网格搜索的自主水下航行器(auv),但前者由于需要人工遥控,无法做到机器人的完全智能化与自主化;后者受制于当前的水下数据传输技术(水声通信、激光通信)无法实现大量数据的高质量传输和能源的供给。这就导致了,水下机器人的应用领域和使用环境受到机器人本身设计结构的极大限制,当下已知的水下机器人多运用于水下图像采集、水质检测以及水下娱乐等领域,尚未有一款能够在不同环境下做到高度自动化地完成对水下设施智能巡检与维护的机器人。
3.现有技术存在以下缺陷:
4.(1)水下图像识别:一方面,由于光在水中传输时会受到水的吸收、反射和散射等影响而发生严重的衰减,采集到的水下图像难免会出现可见范围有限、模糊不清、低对比度、非均匀光照、色彩不协调及噪声等问题。另一方面,水下机器人在运行过程中,推进器产生的水流扰动会扬起水底的泥沙而使环境变得浑浊,进一步加大图识别的难度。
5.(2)不同水下环境的智能运行:当前绝大多数水下机器人工作模式单一,只能在特定的环境下才能稳定运行,一旦环境发生了改变或受到大程度的扰动就会出现故障,这就使得水下巡检机器人很难在陌生的水域下完成工作。
6.(3)大多数水下机器人仍采用线缆式的供电与数据传输,一方面,线缆的粗细、柔软度以及重量都会严重影响水下机器人在水下的姿态调整以及运动。另一方面受制于线缆的长度,信号传输距离受到极大的限制。而目前的水声通信由于成本过高、技术尚未成熟,仍不能投入商用。
技术实现要素:
7.本发明的目的就在于为了解决上述问题而提供一种多环境水下智能巡检机器人。
8.本发明通过以下技术方案来实现上述目的:
9.本发明包括传感器模块、视觉识别模块、主控模块、数据传输模块、电源模块、机械臂清除模块和驱动模块,所述传感器模块和所述视觉识别模块的信号输出端与所述主控模块的信号输入端连接,所述电源模块与所述主控模块、所述驱动模块和所述机械臂清除模块连接,所述主控模块的数据传输端与所述数据传输模块连接,所述主控模块的控制输出端与所述驱动模块和所述机械臂清除模块连接。
10.进一步,所述主控模块包括照明装置、障碍物传感器、主控板、透明密封仓、密封仓法兰盖板,所述主控板与所述照明装置、障碍物传感器和所述传感器模块电性连接,所述主控板设置于所述透明密封仓内,所述密封仓法兰盖板盖合所述透明密封仓,所述照明装置、障碍物传感器设置于所述透明密封仓外,所述电源模块设置于所述透明密封仓内,所述主
控板与所述视觉识别模块、所述数据传输模块、所述电源模块、所述机械臂清除模块和所述驱动模块连接。
11.进一步,所述传感器模块包括九轴姿态传感器、盐度传感器、浑浊度传感器和压力传感器,所述九轴姿态传感器设置于所述主控板上,所述盐度传感器、所述浑浊度传感器和所述压力传感器设置于所述透明密封仓外,所述九轴姿态传感器、所述盐度传感器、所述浑浊度传感器、所述驱动模块和所述压力传感器与所述主控板电性连接。
12.进一步,所述驱动模块包括右前侧水下推进器、左前侧水下推进器、右侧水下推进器、左侧水下推进器、右后侧水下推进器、左后侧水下推进器和双向无刷电调,所述双向无刷电调与所述主控板的控制信号输出端连接,所述双向无刷电调的控制信号输出端分别与所述右前侧水下推进器、左前侧水下推进器、右侧水下推进器、左侧水下推进器、右后侧水下推进器、左后侧水下推进器的控制信号输入端连接,所述右前侧水下推进器、左前侧水下推进器、右侧水下推进器、左侧水下推进器、右后侧水下推进器、左后侧水下推进器位于所述透明密封仓外,所述右前侧水下推进器、所述左前侧水下推进器、所述右后侧水下推进器和所述左后侧水下推进器分别位于所述透明密封仓外的四端并方向为上下方,所述右侧水下推进器和所述左侧水下推进器分别位于所述透明密封仓外的两侧,并位于前后方。
13.进一步,所述机械臂清除模块包括上段机械臂舵机、中段机械臂舵机、下段机械臂舵机和清洁毛刷,所述上段机械臂舵机固定设置于所述透明密封仓的下端,所述上段机械臂舵机的转轴与所述中段机械臂舵机固定连接,所述中段机械臂舵机的转轴与所述下段机械臂舵机固定连接,所述中段机械臂舵机的转轴与所述清洁毛刷固定连接,所述下段机械臂舵机的转动方向与所述中段机械臂舵机的转动方向相反。
14.本发明的有益效果在于:
15.本发明是一种多环境水下智能巡检机器人,与现有技术相比,本发明搭载多种高精度传感器(浑浊度、压力、温度等传感器),能对机器人所处的环境进行实时监测,并根据不同环境选择合适的工作模式,从而高效完成巡检工作。机器人同时搭载有九轴姿态传感器,结合imu姿态融合算法,实时监控机器人在水中的姿态数据,使其在水中遇到扰动或突发状况时能自主调节姿态加以应对。图像识别方面所选用的k210是基于risc
‑
v精简指令集的一款mcu,芯片架构包含了一个自研的神经网络硬件加速器kpu,可以高性能地进行卷积神经网络运算并进行深度学习,从而提高水下目标物识别率。偏振成像技术可以对水下散射进行有效抑制,在水下成像环境中,分析目标信息光,后向散射光和前向散射光相应的偏振特性,针对性地解决不同分量对图像的影响进而实现图像质量的提高从而更好地应对复杂水下环境的图像识别。
附图说明
16.图1是本发明的结构原理框图;
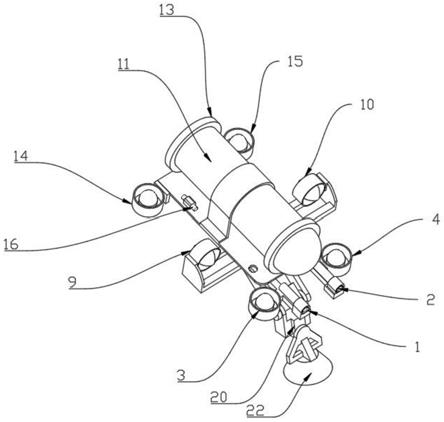
17.图2是本发明的一侧结构示意图;
18.图3是本发明的另一侧结构示意图;
19.图4是本发明的下侧结构示意图;
20.图5是本发明的透明密封仓内部结构示意图;
21.图6是本发明视觉算法的流程图。
具体实施方式
22.下面结合附图对本发明作进一步说明:
23.如图1
‑
5所示:本发明包括传感器模块、视觉识别模块5、主控模块、数据传输模块、电源模块6、机械臂清除模块和驱动模块,所述传感器模块和所述视觉识别模块5的信号输出端与所述主控模块的信号输入端连接,所述电源模块6与所述主控模块、所述驱动模块和所述机械臂清除模块连接,所述主控模块的数据传输端与所述数据传输模块连接,所述主控模块的控制输出端与所述驱动模块和所述机械臂清除模块连接。
24.进一步,所述主控模块包括照明装置1、障碍物传感器2、主控板7、透明密封仓11、密封仓法兰盖板13,所述主控板7与所述照明装置1、障碍物传感器2和所述传感器模块电性连接,所述主控板7设置于所述透明密封仓11内,所述密封仓法兰盖板13盖合所述透明密封仓11,所述照明装置1、障碍物传感器2设置于所述透明密封仓11外,所述电源模块6设置于所述透明密封仓11内,所述主控板7与所述视觉识别模块5、所述数据传输模块、所述电源模块6、所述机械臂清除模块和所述驱动模块连接。
25.进一步,所述传感器模块包括九轴姿态传感器8、盐度传感器16、浑浊度传感器17和压力传感器18,所述九轴姿态传感器8设置于所述主控板7上,所述盐度传感器16、所述浑浊度传感器17和所述压力传感器18设置于所述透明密封仓11外,所述九轴姿态传感器8、所述盐度传感器16、所述浑浊度传感器17、所述驱动模块和所述压力传感器18与所述主控板7电性连接。
26.进一步,所述驱动模块包括右前侧水下推进器3、左前侧水下推进器4、右侧水下推进器9、左侧水下推进器10、右后侧水下推进器14、左后侧水下推进器15和双向无刷电调12,所述双向无刷电调12与所述主控板7的控制信号输出端连接,所述双向无刷电调12的控制信号输出端分别与所述右前侧水下推进器3、左前侧水下推进器4、右侧水下推进器9、左侧水下推进器10、右后侧水下推进器14、左后侧水下推进器15的控制信号输入端连接,所述右前侧水下推进器3、左前侧水下推进器4、右侧水下推进器9、左侧水下推进器10、右后侧水下推进器14、左后侧水下推进器15位于所述透明密封仓11外,所述右前侧水下推进器3、所述左前侧水下推进器4、所述右后侧水下推进器14和所述左后侧水下推进器15分别位于所述透明密封仓11外的四端并方向为上下方,所述右侧水下推进器9和所述左侧水下推进器10分别位于所述透明密封仓11外的两侧,并位于前后方。
27.进一步,所述机械臂清除模块包括上段机械臂舵机19、中段机械臂舵机20、下段机械臂舵机21和清洁毛刷22,所述上段机械臂舵机19固定设置于所述透明密封仓11的下端,所述上段机械臂舵机19的转轴与所述中段机械臂舵机20固定连接,所述中段机械臂舵机20的转轴与所述下段机械臂舵机21固定连接,所述中段机械臂舵机20的转轴与所述清洁毛刷22固定连接,所述下段机械臂舵机21的转动方向与所述中段机械臂舵机20的转动方向相反。
28.巡检机器人启动后,由电源模块6中的大容量锂电池通过降压、稳压分别将稳定的电供给主控板7与双向无刷电调12。放入水下工作区域后,传感器模块启动,盐度传感器16、浑浊度传感器17、压力传感器18采集当前环境下的数据反馈给主控板7,从而机器人可以根据反馈数据选择合适的工作模式。确定工作模式后,启动驱动模块,主控板7将信号传给双向无刷电调12,进而驱动右前侧水下推进器3、左前侧水下推进器4、右侧水下推进器9、左侧
水下推进器10、右后侧水下推进器14、左后侧水下推进器15,使机器人开始在工作区域进行运动。机器人事先通过卷积神经网络对需要巡检的对象的水下图片进行深度学习,并将训练好的数据集存储在存储卡中,结合偏振视觉增强算法,可以有效地降低水下环境对图像识别的干扰,最终实现整个视觉识别模块5对海底输送管道、海上钻井平台、船舶外壁等水下设施的识别。识别待巡检目标后,主控板7向驱动模块发送信号,使机器人根据特定路线进行巡检。机器人在运行之后难免会受到水流以及其他因素的影响,搭载的九轴姿态传感器8可以实时监控机器人的姿态与位置数据,并反馈给主控板7,高性能stm32f407单片机将传回的数据进行滤波并通过姿态融合算法计算出机器人的实时姿态数据,进而在其受到外在因素扰动时能及时调整姿态与位置,继续进行巡检工作。机器人在巡检过程中通过视觉识别模块5自动识别水下设施上的吸附物,并反馈给主控板7吸附物的坐标信息,启动机械臂清除模块对吸附物进行高效的清除。整个巡检过程中,机器人通过数据传输模块将采集到的水下图像、环境、设备状况等数据传输给远程监控终端。
29.图像识别方面:
30.图像识别方面所选用的k210是基于risc
‑
v精简指令集的一款mcu,芯片架构包含了一个自研的神经网络硬件加速器kpu,可以高性能地进行卷积神经网络运算并进行深度学习,从而提高水下目标物识别率。偏振成像技术可以对水下散射进行有效抑制,在水下成像环境中,分析目标信息光,后向散射光和前向散射光相应的偏振特性,针对性地解决不同分量对图像的影响进而实现图像质量的提高从而更好地应对复杂水下环境的图像识别。
31.不同水下环境的智能运行方面:
32.(1)多种环境自适应方面:搭载多种高精度传感器(浑浊度、压力、温度等传感器),能对机器人所处的环境进行实时监测,并根据不同环境选择合适的工作模式,从而高效完成巡检工作。机器人同时搭载有九轴姿态传感器,结合imu姿态融合算法,实时监控机器人在水中的姿态数据,使其在水中遇到扰动或突发状况时能自主调节姿态加以应对。
33.(2)姿态解算方面:为解决机器人在水下易受到水流及其他因素的扰动的问题,通过高低通滤波、mahony互补滤波等对高精度九轴传感器传来的原始数据进行姿态融合,从而提高数据的精度和动态特性。
34.数据传输方面:
35.采用数据线缆与wifi相结合的方法进行数据的传输。首先将机器人返回的图像等数据通过线缆高质量、高速度地传输给连接在的水面的wifi模块,再经由wifi模块将数据通过网络传输给远程监测终端,实现对机器人状态与工作情况的远程监控。
36.视觉识别算法:
37.一、偏振图像增强
38.(1)在采集水下图像时,由于目标物的返射光在经由水这一介质到达摄像头(探测器)时,水中存在的悬浮颗粒物等的强散射和吸收效应会对反射光的强度造成一定的衰弱,进而对水下图像的质量造成影响。
39.d(x,y):目标透射光
40.l(x,y):目标的真实反射光强
41.t(x,y):光在水中的透射率
42.d(x,y)=l(x,y)t(x,y)
43.直接透射光的强度随着在水中传播距离的增加,呈指数衰减。为了量化水体对光线的吸收与散射效应,引用β(x,y)代表其中的衰减系数。
44.t(x,y)=e
‑
β(x,y)z
45.(2)后向散射光,又称为杂散光是由水中的悬浮颗粒物散射造成的
46.b(x,y):后向散射
47.a
∞
:水中延伸到无穷远处的后向散射值。
48.b(x,y)=a
∞
[1
‑
t(x,y)]
[0049]
(3)摄像头(探测器)接收到的总光强相当于直接透射光强和后向散射光强的非相干叠加
[0050]
i(x,y)=d(x,y)+b(x,y)
[0051]
=l(x,y)t(x,y)+a
∞
[1
‑
t(x,y)]
[0052]
(4)把从光源到分布粒子的光线和从分布粒子到相机的光线构成的平面作为标准平面。将一束光线分成两个偏振分量,平行的量和垂直的量。光线和此平面平行的偏振量为b
||
,光线和此平面垂直的偏振量为b
⊥
,则对透射率t(x,y)的进一步变化得到:
[0053][0054]
(5)真实反射光强可进一步表示为:
[0055][0056]
(6)摄像头前安装可调节偏振片,用过旋转偏振片,当偏振角度为90度时,得到i
||
(x,y),当偏振角度为0度时,得到i
⊥
(x,y),表达式如下。
[0057]
i
||
(x,y)=d
||
(x,y)+b
||
(x,y)
[0058]
i
⊥
(x,y)=d
⊥
(x,y)+b
⊥
(x,y)
[0059]
i(x,y)=i
||
(x,y)+i
⊥
(x,y)
[0060]
(7)后向散射的偏振度:
[0061][0062]
(8)截取正交偏振图片背景区域部分,采用求平均的方法求得整幅图像的后向散射值a
∞
(x,y)。再根据截取的背景区域的偏振度,用其均值代替整幅图的偏振度p
scat
(x,y)。
[0063][0064]
(9)最终得到清晰的图片
[0065]
二、深度学习:
[0066]
(1)收集第一部分得到的清晰的水下图像。
[0067]
(2)将图片处理成分辨率为224x224的格式,并按顺序命名,使其适应yolo v2算法的规则。
[0068]
(3)在pc端的maixpy平台进行图片的在线模型训练。
[0069]
(4)对k210开发板进行固件刷写。
[0070]
(5)将第(4)步训练好的模型保存在k210内存卡中。k210的芯片架构包含了一个自研的神经网络硬件加速器kpu,可以帮助高性能地进行卷积神经网络运算并进行深度学习,进一步提升水下图像识别的准确度。
[0071]
(6)根据训练的效果,实现对目标物的识别。
[0072]
1、图像识别方面:
[0073]
图像识别方面所选用的k210是基于risc
‑
v精简指令集的一款mcu,芯片架构包含了一个自研的神经网络硬件加速器kpu,可以高性能地进行卷积神经网络运算并进行深度学习,从而提高水下目标物识别率。偏振成像技术可以对水下散射进行有效抑制,在水下成像环境中,分析目标信息光,后向散射光和前向散射光相应的偏振特性,针对性地解决不同分量对图像的影响进而实现图像质量的提高从而更好地应对复杂水下环境的图像识别。
[0074]
2、不同水下环境的智能运行方面:
[0075]
(1)多种环境自适应方面:搭载多种高精度传感器(浑浊度、压力、温度等传感器),能对机器人所处的环境进行实时监测,并根据不同环境选择合适的工作模式,从而高效完成巡检工作。机器人同时搭载有九轴姿态传感器,结合imu姿态融合算法,实时监控机器人在水中的姿态数据,使其在水中遇到扰动或突发状况时能自主调节姿态加以应对。
[0076]
(2)姿态解算方面:为解决机器人在水下易受到水流及其他因素的扰动的问题,通过高低通滤波、mahony互补滤波等对高精度九轴传感器传来的原始数据进行姿态融合,从而提高数据的精度和动态特性。
[0077]
3、数据传输方面:
[0078]
采用数据线缆与wifi相结合的方法进行数据的传输。首先将机器人返回的图像等数据通过线缆高质量、高速度地传输给连接在的水面的wifi模块,再经由wifi模块将数据通过网络传输给远程监测终端,实现对机器人状态与工作情况的远程监控。
[0079]
以上显示和描述了本发明的基本原理和主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。