1.本发明涉及船舶与海洋工程的技术领域,具体地,涉及用于滑翔器的变扭转刚度水下牵引机水翼系统,尤其涉及一种用于波浪滑翔器的变扭转刚度水下牵引机水翼设计。
背景技术:
2.波浪滑翔器利用太阳能为所携带传感通讯设备供电,通过将波浪动力直接转化为前进动力的新型海洋移动观测平台,通过对波浪能和太阳能的综合利用,可实现长达一年,上万公里的续航,成为国内外研究热点。
3.波浪滑翔器主要包括三个部分,水面浮体、连接柔性缆绳、水下牵引机。其中水下牵引机所携带的水翼的被动扑翼运动,为整个装置产生前进推力,是设计研发的重点。
4.在公开号为cn110395376a的专利文献中公开了一种混合驱动波浪滑翔机,包括水面母船、柔性扁平缆和水下牵引机,所述水面母船与所述水下牵引机通过所述柔性扁平缆进行柔性连接,所述水面母船包括主浮体、密封固定在所述主浮体内的通讯和定位装置、主控系统和蓄电池以及太阳能发电装置,所述水下牵引机包括牵引机主体结构、电子罗盘、转向机构和波浪转换机构,在所述主浮体的后部底面两侧各设有一水面推进器,在所述牵引机主体结构的底部中间位置设有一水下推进器,所述水面推进器和所述水下推进器均由所述蓄电池供电、由所述主控系统控制。
5.在公开号为cn110803271a的专利文献中公开了一种用于波浪滑翔器的水下牵引机,包括成对称结构的牵引机主梁侧板ⅰ和牵引机主梁侧板ii、翼板、防护板ⅰ、防护板ii、套环、机翼限位组件、钛合金轴ⅰ、钛合金轴ii、主梁支撑、轴套ⅰ、轴套ii。在牵引机主梁侧板ⅰ和牵引机主梁侧板
ⅰⅰ
上开有通孔,螺栓依次穿过牵引机主梁侧板ⅰ、套环、牵引机主梁侧板
ⅰⅰ
组装成框架式结构,机翼限位组件一侧固定在钛合金轴ii上,另一侧固定在螺栓上,并且将机翼限位组件中的拉簧用压簧代替,可以对机翼的摆动幅度进行限制。
6.在公开号为cn111669084a的专利文献中公开了一种波浪滑翔器用水下驱动方法及电机驱动器,属于无刷直流电机技术领域,其特征在于,至少包括:控制电机三相绕组的电流流通方向的mosfet桥;控制mosfet桥工作状态的mosfet驱动模块;用于检测mosfet桥输出给电机电流大小的电流采集模块;用于接收上位机的控制信号、接收电流采集模块的信号,并将控制信号发送给电机的主控模块;用于实现主控模块和上位机之间信号通信的通信模块;为所述主控模块、mosfet驱动模块、mosfet桥、电流采集模块和通信模块提供电源的电源模块;其中:所述主控模块通过mosfet驱动模块与mosfet桥连接,所述mosfet桥与电机连接。
7.水翼的扭转刚度对推力转化、推进效率影响较大。而现有的波浪滑翔器的水下牵引机均为定刚度模式。在水下牵引机制造时,通过调整结构参数,会达到一个相对最佳的水翼扭转刚度。然而该扭转刚度通常只能满足在指定的几个工况下达到最佳性能。在波浪滑翔器在几个月到一年的时间跨度内,波况状态随机,变化较大,现有设计难以达到最佳性能。因此,需要提出一种技术方案以改善上述技术问题。
技术实现要素:
8.针对现有技术中的缺陷,本发明的目的是提供一种用于滑翔器的变扭转刚度水下牵引机水翼系统。
9.根据本发明提供的一种用于滑翔器的变扭转刚度水下牵引机水翼系统,包括水面浮体船、柔性缆绳和水下牵引机,水面浮体船和柔性缆绳连接,柔性缆绳和水下牵引机连接;
10.所述水下牵引机包括水翼俯仰运动单元、刚度调节系统、速度感知单元和安装板架组件;
11.所述水翼俯仰运动单元包括水翼、固定转轴、运动轴、弹簧和弹簧连接销,所述水翼绕所述固定转轴做俯仰运动,所述弹簧提供俯仰运动的恢复力矩。
12.优选地,所述弹簧连接销与所述刚度调节系统相连,所述刚度调节系统控制移位所述弹簧连接销的位置,对弹簧初始变形进行调节。
13.优选地,所述弹簧连接销安装在导向装置内,所述弹簧连接销滑动设置在导向装置内。
14.优选地,所述刚度调节系统包括驱动装置、控制器和传动机构。
15.优选地,相邻所述弹簧的活动端通过绳索或刚性连杆连接,所述驱动装置调节多个水翼的俯仰刚度。
16.优选地,所述绳索通过定滑轮装置导向改变绳索牵引路径。
17.优选地,所述电机通过蜗轮蜗杆或丝杆螺母结构对弹簧活动端位置进行线性调节。
18.优选地,所述速度感知单元包括流速测量仪和惯性传感器,所述流速测量仪和惯性传感器获得实时的流速信息和牵引机位姿信息。
19.优选地,所述传感单元得到牵引机的运动速度和姿态,将获取的速度信息反馈给所述刚度调节系统的控制器,通过电机控制系统对水翼进行刚度控制,对水下牵引机进行综合性能控制。
20.优选地,所述导向装置固定在水下牵引机安装板架上,所述导向装置包括导向槽配合连接销结构和直线轴承配合连接销结构。
21.与现有技术相比,本发明具有如下的有益效果:
22.1、本发明通过水下牵引机的刚度调节系统,可以实现水翼刚度的主动调控,进而实现对波浪滑翔器速度的主动控制;
23.2、本发明通过刚度调节系统,结合速度感知单元,可以实现波浪滑翔器对波况更高的适应性,以达到对波浪能的最大捕获;
24.3、本发明通过将六对水翼俯仰运动单元串联起来,实现一个驱动器同时对六个水翼的刚度调节,降低了驱动装置的要求;
25.4、本发明刚度调节系统中,通过涡轮蜗杆配合、t型丝杆或步进电机等装置,实现系统自锁,以减少能耗;
26.5、本发明通过机械限位装置,将水翼弹簧连接销的位移限制在一定范围,即使刚度调节系统出现故障,仍能保持传统波浪滑翔器水下牵引机的正常功能;
27.6、本发明对于采用柔性绳索传动调节力时,通过设置定滑轮,可有效避开水翼的
运动轴等部件的干涉问题。
附图说明
28.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
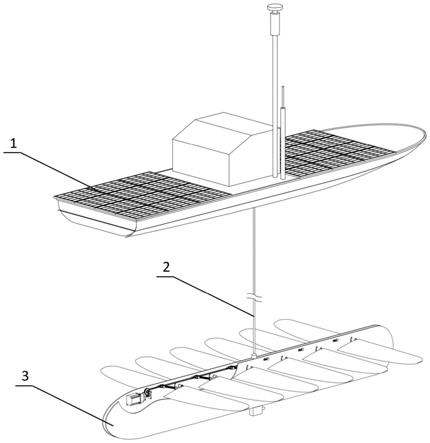
29.图1为本发明的一个较佳的整体结构示意图;
30.图2为本发明中通过弹簧作用力计算水翼扭转刚度的参数图;
31.图3为本发明中的水翼俯仰运动单元结构示意图;
32.图4为本发明的一种较佳实施例的直拉式水翼刚度调节系统图;
33.图5为本发明的一种较佳实施例的滑动连杆式水翼刚度调节系统图;
34.图6为本发明的一种较佳实施例的偏移拉线式水翼刚度调节系统图;
35.图7为本发明的一种较佳实施例的直线轴承滑块式水翼刚度调节系统图;
36.图8为本发明的一种变扭转刚度水下牵引机水翼控制方法框图。
37.其中:
38.水面浮体船1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
惯性传感器309
39.柔性缆绳2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
流速传感器310
40.水下牵引机3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
侧板311
41.水翼301
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
直线轴承模块312
42.固定转轴302
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转接零件313
43.运动轴303
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑动连杆314
44.弹簧304
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
丝杆螺母机构315
45.弹簧连接销305
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电机308
46.钢丝绳306
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定滑轮317
47.蜗轮蜗杆机构307
具体实施方式
48.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
49.本发明中,水翼绕所述固定轴的俯仰运动,在某些文献中被描述为绕所述固定轴的旋转运动;水翼俯仰角度也被称为转动角度、扭转角度。如未特别声明,几种称谓应具有等同意义。
50.如图1所示,一种用于滑翔器的变扭转刚度水下牵引机水翼系统,包括水面浮体船1、柔性缆绳2、水下牵引机3。水下牵引机3包含水翼俯仰运动单元、刚度调节系统、速度感知单元、安装板架组件等。
51.如图2所示,所述水翼俯仰运动单元包含水翼301、固定转轴302、运动轴303、弹簧304、弹簧连接销305。
52.水翼301与固定转轴302和运动轴303固连,弹簧304分别连接了运动轴303和弹簧
连接销305。所述固定转轴302和弹簧连接销305与所述安装板架组件连接,位置保持不变,水翼301可绕固定转轴302做俯仰运动,俯仰运动的恢复力矩由弹簧304提供。
53.如图3所示,当水翼转角θ为零时,水翼与弹簧共线,称之为初始状态。假定弹簧拉力与伸长量成线性关系,则在任意转角θ下,弹簧的伸长量与水翼做俯仰运动时的刚度的关系可表示为:
[0054][0055]
f0=t0+kδx0[0056]
其中m表示水翼俯仰运动时的等效刚度;k表示弹簧的刚度;θ为水翼转动角;x为任意水翼转动角θ时弹簧的长度;x0为弹簧自然状态下原长;δx0为水翼与弹簧共线时(θ=0)弹簧初始变形;δx表示因转动角θ,弹簧被额外拉伸的长度。f0表示水翼与弹簧共线时弹簧的拉力,又称初始拉力,包括两部分:弹簧预紧力t0和弹簧初始变形δx0引起的kδx0。r1为水翼两个轴中心点的距离;r2为水翼固定轴与弹簧固定端端点的距离。式中最后一个近似表示在θ=0处取泰勒展开式一阶结果。
[0057]
随着弹簧初始拉长量的增加,f0将会增大,进而水翼做俯仰运动时的刚度会增大。
[0058]
以下展示包含多种水翼刚度调节系统的水下牵引机的多种实施方式,本发明的保护范围并非仅限于所提到的实施例。
[0059]
实施例一
[0060]
如图4所示,为一种包含直拉式水翼刚度调节系统的水下牵引机,包括水翼俯仰运动单元、刚度调节系统、速度感知单元、安装板架组件。所述水翼俯仰运动单元包含水翼301、固定转轴302、运动轴303、弹簧304、弹簧连接销305,所述刚度调节系统包括钢丝绳306、蜗轮蜗杆传动结构307、电机308,速度感知单元包括惯性传感器309、流速传感器310,安装板组件包括侧板311及其他连接紧固件。
[0061]
所述惯性传感器309和流速传感器310二者独立安装,其中流速传感器安装于水下牵引机前方,避免受到水翼尾流干扰,
[0062]
所述水下牵引机有6个俯仰运动单元,固定转轴302安装在侧板311上。侧板上有六个长度为5cm的槽,弹簧连接销305安装在两个侧板311的长槽位置,弹簧连接销305在长槽内滑动,所述长槽为弹簧连接销305提供机械限位。为了减小运动阻力,在弹簧连接销305与两侧板311接触的位置安装有两个微型轴承。
[0063]
所述弹簧连接销305由钢丝绳306进行串联,实现同步的位置调节。每两个弹簧连接销305之间由两条弹簧钢丝绳306进行连接,弹簧连接销305上在垂直于轴线方向上开有四个轴线平行的槽,用于穿引钢丝绳306。弹簧连接销305中间位置设有环形凹槽,使得弹簧304能够扣于弹簧连接销305上。
[0064]
涡轮蜗杆传动结构307可以实现将电机308的旋转运动转化为对钢丝绳306的直线拉动。涡轮与两个侧板311通过轴和轴承连接,涡轮两侧设有绕线凹槽,涡轮转动时候,钢丝绳306在凹槽上绕动,从而拉动或释放钢丝绳306,实现对每一个弹簧连接销305的移位,进而调控弹簧304的拉力,引起水翼301俯仰运动扭转刚度的变化。
[0065]
实施例二
[0066]
如图5所示,为一种包含刚性滑动连杆式水翼刚度调节系统的水下牵引机,包括水
翼俯仰运动单元、刚度调节系统、速度感知单元、安装板架组件。所述水翼俯仰运动单元包含水翼301、固定转轴302、运动轴303、弹簧304、弹簧连接销305,所述刚度调节系统包括直线轴承模块312、转接零件313、滑动连杆314、丝杆螺母机构315、电机308,速度感知单元包括惯性传感器309、流速传感器310,安装板组件包括侧板311。
[0067]
所述惯性传感器309和流速传感器310二者可采用捷联式安装。
[0068]
所述水下牵引机有6个俯仰运动单元,固定转轴302安装在侧板311上。侧板上有六个长度为5cm的槽,弹簧连接销305安装在两个侧板311的长槽位置,长槽为弹簧连接销305提供机械限位。为了减小运动阻力,在弹簧连接销305与两侧板311接触的位置安装有两个微型轴承。
[0069]
所述弹簧连接销305与转接零件313通过螺钉进行连接,弹簧连接销上开有两个螺钉孔,分别与转接零件313的两端连接。转接零件313下端有直径为8mm的通孔,滑动连杆314穿过通孔。滑动连杆314在转接零件313所处的位置处开有螺纹孔,滑动连杆314与六个转接零件313通过螺钉紧固连接。直线轴承模块312包括直线轴承和直线轴承安装零件,三个直线轴承模块312安装在侧板311上,滑动连杆314穿过三个直线轴承模块312。滑动连杆314靠近电机308的端部与丝杆螺母机构315的螺母端连接。电机308的轴通过联轴器与丝杆螺母机构315连接
[0070]
当电机308转动时,带动丝杆螺母机构315运动,使得滑动连杆314沿直线运动,带动弹簧连接销305移动,从而改变弹簧304的拉伸长度,影响水翼301的运动刚度。
[0071]
实施例三
[0072]
如图6所示,为一种包含直拉式水翼刚度调节系统的水下牵引机,包括水翼俯仰运动单元、刚度调节系统、速度感知单元、安装板架组件。所述水翼俯仰运动单元包含水翼301、固定转轴302、运动轴303、弹簧304、弹簧连接销305,所述刚度调节系统包括钢丝绳306、蜗轮蜗杆传动结构307、电机308、定滑轮317,速度感知单元包括惯性传感器309、流速传感器310,安装板组件包括侧板311。
[0073]
本实施例三与实施例一大致相同,区别在于加入了定滑轮结构。在加入定滑轮结构后,弹簧连接销305的位置可以下移,进而防止了钢丝绳306与水翼301的干涉。定滑轮317通过轴承与侧板311连接,定滑轮317上开有两个环形凹槽,使得钢丝绳306能够绕在定滑轮317上,实现钢丝绳牵引路径的改变。
[0074]
实施例四
[0075]
如图7所示,为一种包含直拉式水翼刚度调节系统的水下牵引机,包括水翼俯仰运动单元、刚度调节系统、速度感知单元、安装板架组件。所述水翼俯仰运动单元包含水翼301、固定转轴302、运动轴303、弹簧304、弹簧连接销305,所述刚度调节系统包括钢丝绳306、蜗轮蜗杆传动结构307、电机308、直线轴承模块312、定滑轮317,速度感知单元包括惯性传感器309、流速传感器310,安装板组件包括侧板311。
[0076]
本实施例四与实施例三大致相同,区别在于改变了弹簧连接销的移动副。弹簧连接销305为一个光滑圆柱体,长约7cm。直线轴承模块312安装在侧板311上,弹簧连接销305与直线轴承模块312配合,弹簧连接销305在直线轴承内做直线运动,弹簧连接销305上可设置机械挡圈,实现前后滑动的机械限位。弹簧连接销305上在垂直于轴线方向开有多个孔,弹簧304通过开孔与弹簧连接销305连接,钢丝绳306通过弹簧连接销305上的开孔将多个弹
簧连接销305连接起来。
[0077]
对于以上所有实施例,均可按照如图8的方法进行速度反馈控制。所述水下牵引机上设有速度感知单元,其位置参照图7,速度感知单元包括惯性传感器309和速度传感器310,速度感知单元能够感知牵引机的实时流速和位姿等信息。通过传感单元得到牵引机的运动速度和姿态等信息,将获取的速度信息反馈给电机控制系统,通过电机控制系统控制弹簧的初始拉伸程度,进而实现水翼刚度的控制,最后实现水下牵引机的综合性能控制。
[0078]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0079]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。