1.本发明属于船舶减摇装置领域,具体涉及一种船体尾部减摇水翼装置。
背景技术:
2.船舶在行驶高海况下受波浪等环境载荷影响容易产生大幅度的摇荡运动,导致船舶的运作性、安全性和舒适性大幅降低。为了减少船舶航行时产生的摇荡运动对船舶舒适性及结构安全的不利影响,各类减摇装置应运而生。
技术实现要素:
3.为解决现有技术中存在的问题,本发明提供一种船体尾部减摇水翼装置,以减缓高海况下船舶摇荡运动。
4.本发明的技术方案如下:一种船体尾部减摇水翼装置,它包括船体和水翼机构,所述船体的尾部通过水翼安装座和水翼转动机构连接水翼机构;
5.固定在船体尾部的水翼安装座上设置减速电机,减速电机驱动蜗杆;减速电机设置在水翼转动机构内,水翼转动机构采用转轴穿出套筒的两端分别固定在端板上,套筒固定在水翼安装座上,转轴的中部设置蜗轮,蜗轮与蜗杆啮合,带动端板转动;
6.所述两个端板分别固定连接水翼机构中的垂直水翼,水翼机构中两个水平水翼构成的v型结构,垂直水翼与水平水翼连接处的夹角为80度,水平水翼的迎水侧为平翼斜边,水平水翼的背水侧为平翼直边,平翼斜边与平翼直边之间的夹角为15度。
7.一种船体尾部减摇水翼装置的工作方法,该减摇装置分为三种工作状态,分别为被动减摇状态、紧急制动状态及出水闲置状态:
8.a、被动减摇状态:减速电机驱动蜗杆正向转动,带动蜗轮和转轴顺时针转动,使固定在转轴两侧端板上的垂直水翼处于竖直位置时,达到被动减摇状态;水翼旋转机构控制垂直水翼处于竖直位置,水平水翼将随着船舶纵摇运动产生一个相对来流方向的攻角,产生阻碍船舶纵摇运动的力,达到被动减摇;
9.b、出水闲置状态:减速电机驱动蜗杆反向转动,带动蜗轮和转轴逆时针转动,进而使固定在转轴两侧端板上的垂直水翼逆时针转动;垂直水翼转动到水平位置或以上时,水平水翼离开水面,进入出水闲置状态;
[0010] c、紧急制动状态:
[0011]
从被动减摇状态进入紧急制动状态时,减速电机驱动蜗杆反向转动,带动蜗轮和转轴逆时针转动,垂直水翼绕转轴转动适当角度使水平水翼尾部接近水面;此时水平水翼与水面作用,产生流体阻力实现紧急制动;
[0012]
从出水闲置状态进入紧急制动状态时,减速电机驱动蜗杆正向转动,带动蜗轮和转轴顺时针转动,垂直水翼绕转轴转动适当角度使水平水翼尾部接近水面;此时水平水翼与水面作用,产生流体阻力实现紧急制动;
[0013]
此时水平水翼与水面作用,产生流体阻力实现紧急制动。
[0014]
水翼安装座设置在船舶尾部,水翼旋转机构可驱动水翼机构绕水翼旋转机构旋转轴转动,使水翼整体可维持在任意角度位置。
[0015]
本发明的有益效果为:这种船舶尾部水翼减摇装置分为三种工作状态,分别为减摇状态、紧急制动状态及出水闲置状态。
[0016]
当水翼减摇装置处于减摇状态时,水翼旋转机构控制垂直水翼处于竖直位置,水平水翼将随着船舶纵摇运动产生一个相对来流方向的攻角,并产生阻碍船舶纵摇运动的力,达到减摇效果。在紧急制动状态下,将水翼整体向后旋转一定角度使水平水翼尾部接近水面,此时水平水翼起到一个挡水板的作用,产生极大的流体阻力实现紧急制动效果。当船舶进港或途径浅海海域不需要水翼减摇时,水翼整体将旋转到水平位置或以上,水平水翼离开水面,进入出水闲置状态。
[0017]
该装置通过电机带动蜗杆旋转,驱动涡轮带动转轴实现减摇装置摆角。由于蜗轮蜗杆具有自锁功能,所以该机构可在任意位置停住。该装置解决了船舶在高海况下的摇荡运动剧烈的问题,能够高效率的减轻船舶纵摇及垂荡,使得船舶在航行过程中更安全和舒适。
附图说明
[0018]
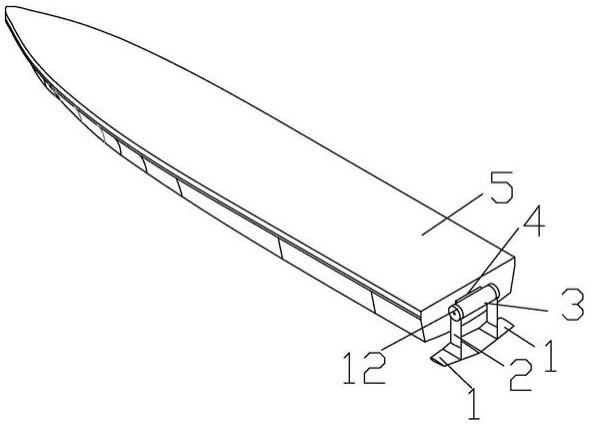
图1是一种船体尾部减摇水翼装置的结构图。
[0019]
图2是一种船体尾部减摇水翼装置的局部剖视图。
[0020]
图3是图2中a的放大图。
[0021]
图4是一种船体尾部减摇水翼装置的侧视图。
[0022]
图5是一种船体尾部减摇水翼装置的仰视图。
[0023]
图6是一种船体尾部减摇水翼装置的减摇状态图。
[0024]
图7是一种船体尾部减摇水翼装置的紧急制动状态图。
[0025]
图8是一种船体尾部减摇水翼装置的出水闲置状态图。
[0026]
图9是一种船体尾部减摇水翼装置的减摇水翼工作原理图。
[0027]
图中:1、水平水翼,1a、平翼斜边,1b、平翼直边,2、垂直水翼,3、水翼转动机构,4、水翼安装座,5、船体,6、水翼机构,7、套筒, 9、蜗杆,10、蜗轮,11、转轴,12、端板;v、水翼处来流速度,f1、减摇状态下水平水翼升力,f2、紧急制动状态下水平水翼升力。
具体实施方式
[0028]
如图1到图5所示的一种船体尾部减摇水翼装置,它包括水平水翼1、垂直水翼2、水翼转动机构3和水翼安装座4。船体5的尾部通过水翼安装座4和水翼转动机构3连接水翼机构6。
[0029]
固定在船体5尾部的水翼安装座4上设置减速电机,减速电机驱动蜗杆9;减速电机设置在水翼转动机构3内,水翼转动机构3采用转轴11穿出套筒7的两端分别固定在端板12上,套筒7固定在水翼安装座4上,转轴11的中部设置蜗轮10,蜗轮10与蜗杆9啮合,带动端板12转动(如图2、图3所示)。
[0030]
所述两个端板12分别固定连接水翼机构6中的垂直水翼2,水翼机构6中两个水平水翼1构成的v型结构,垂直水翼2与水平水翼1连接处的夹角为80度(如图4所示),水平水翼
1的迎水侧为平翼斜边1a,水平水翼1的背水侧为平翼直边1b,平翼斜边1a与平翼直边1b之间的夹角为15度(如图5所示)。
[0031]
该减摇装置分为三种工作状态,分别为被动减摇状态、紧急制动状态及出水闲置状态:
[0032]
a、被动减摇状态:减速电机驱动蜗杆9正向转动,带动蜗轮10和转轴11顺时针转动,使固定在转轴11两侧端板12上的垂直水翼2处于竖直位置时,达到被动减摇状态;水翼旋转机构控制垂直水翼处于竖直位置,水平水翼1将随着船舶纵摇运动产生一个相对来流方向的攻角,产生阻碍船舶纵摇运动的力,达到被动减摇;
[0033]
b、出水闲置状态:减速电机驱动蜗杆9反向转动,带动蜗轮10和转轴11逆时针转动,进而使固定在转轴11两侧端板12上的垂直水翼2逆时针转动;垂直水翼2转动到水平位置或以上时,水平水翼1离开水面,进入出水闲置状态;
[0034] c、紧急制动状态:
[0035]
从被动减摇状态进入紧急制动状态时,减速电机驱动蜗杆9反向转动,带动蜗轮10和转轴11逆时针转动,垂直水翼2绕转轴11转动适当角度使水平水翼1尾部接近水面;此时水平水翼1与水面作用,产生流体阻力实现紧急制动;
[0036]
从出水闲置状态进入紧急制动状态时,减速电机驱动蜗杆9正向转动,带动蜗轮10和转轴11顺时针转动,垂直水翼2绕转轴11转动适当角度使水平水翼1尾部接近水面;此时水平水翼1与水面作用,产生流体阻力实现紧急制动。
[0037]
图6为水翼减摇装置处于被动减摇状态时,垂直水翼2处于竖直位置,水平水翼1将随着船舶纵摇运动产生一个相对来流方向的攻角,并产生阻碍船舶纵摇运动的力,达到减摇效果。如图9所示,船体5以速度v向前行驶,并产生一个5度的纵摇角,由于水平水翼1与船体5运动一致,则水平水翼1随之产生一个5度攻角,由于水流作用,水平水翼产生升力f1,从而抑制船舶纵摇运动。如图5所示为船舶抬艏5度角情况,同理可知船舶埋艏情况下此装置也会起到相同的减摇效果。
[0038]
如图7所示在紧急制动状态下,将水翼机构6向后旋转一定角度使水平水翼尾部接近水面,此时水平水翼起到一个挡水板的作用,在水流作用下产生流体阻力f2实现紧急制动。
[0039]
如图8所示当船舶进港或途径浅海海域不需要水翼减摇时,水翼结构6将旋转到水平位置或以上,水平水翼离开水面,进入出水闲置状态。
[0040]
该装置通过电机带动蜗杆旋转,驱动涡轮带动转轴实现减摇装置摆角。由于蜗轮蜗杆具有自锁功能,所以该机构可在任意位置停住。