1.本发明涉及水处理设备,具体地,涉及一种水面智能清理机器人。
背景技术:
2.目前,智能化机器人在各种场景中的运用中特别广泛,而在水体垃圾清理领域的开发较少。我国随着经济发展,旅游业和自然环境的开发,水质监控和水体治理就显得尤为关键了,现在已知的清理机器人功能比较单一,场地适应性较差,不利于长时间使用,而且在垃圾回收及污物分类回收处理方面没有特别好的功能划分,容易造成垃圾分类回收困难和二次污染。
3.中国专利申请为cn106218836b公开了一种多段履带式水下智能清理机器人,包括有控制机体、执行机体、多面辊刷清理系统和单自由度清洗盘系统,其中控制机体与执行机体之间通过旋转尾架相连接,多面辊刷清理系统设在执行机体的前端,单自由度清洗盘系统设在控制机体和执行机体之间,控制机体上设有控制系统,控制系统通过内部的单片机控制执行机体、多面辊刷清理系统和单自由度清洗盘系统的工作这,样的设计使前后机体可单独运动,可以简单有效的通过直角区域。性能稳定,提高了智能清理机器人的使用范围,但是未能明确解决垃圾的回收和存放问题,动力推动问题和垃圾检测系统的不完善,以及垃圾的回收和抓取易造成困扰。
技术实现要素:
4.本发明的目的是提供一种水面智能清理机器人,操作简单,使用智能,可以在湖泊、河道、湿地进行工作使用,能够有效的对水面垃圾及污物进行快速清理和回收。
5.为了实现上述目的,本发明提供了一种水面智能清理机器人,所述水面智能清理机器人包括壳体,所述壳体内设置有主控制模块,所述壳体的端部向内凹陷形成有垃圾回收槽,所述壳体中靠近所述垃圾回收槽处设置有与所述主控制模块相连接的电动伸缩杆,所述电动伸缩杆的端部设置有与所述主控制模块相连接的电动夹,所述电动夹的端部设置有与所述主控制模块相连接的超声波感应器,当所述超声波感应器感应到周围垃圾时,通过所述主控制模块控制所述电动夹将所述垃圾夹紧,并通过所述主控制模块控制所述电动伸缩杆进行伸缩,以将垃圾收入所述垃圾回收槽。
6.优选地,所述垃圾回收槽的开口处设置有与所述主控制模块相连接的感应器,当所述电动夹靠近所述感应器时,能够通过所述主控制模块分别控制所述电动夹和所述电动伸缩杆复位。
7.优选地,所述壳体的两侧分别设置有动力推进机构。
8.优选地,所述动力推进机构包括设置在所述壳体两侧的驱动壳体,所述驱动壳体内设置有驱动电机,所述驱动电机的输出轴连接有推动转轮,所述驱动电机和所述主控制模块相连接。
9.优选地,所述壳体内设置有与所述主控制模块相连接的充电模块。
10.优选地,所述壳体中远离所述垃圾回收槽的一端固定有与所述充电模块电连接的充电口和充电按钮。
11.优选地,所述壳体的上端设置有与所述主控制模块相连接的全景摄像头。
12.优选地,所述壳体的两端分别设置有前光照灯和后光照灯。
13.优选地,所述壳体中远离所述垃圾回收槽的一端形成有与其相连通的垃圾回收舱口。
14.本发明提供了一种水面智能清理机器人,所述水面智能清理机器人包括壳体,所述壳体内设置有主控制模块,所述壳体的端部向内凹陷形成有垃圾回收槽,所述壳体中靠近所述垃圾回收槽处设置有与所述主控制模块相连接的电动伸缩杆,所述电动伸缩杆的端部设置有与所述主控制模块相连接的电动夹,所述电动夹的端部设置有与所述主控制模块相连接的超声波感应器,当所述超声波感应器感应到周围垃圾时,通过所述主控制模块控制所述电动夹将所述垃圾夹紧,并通过所述主控制模块控制所述电动伸缩杆进行伸缩,以将垃圾收入所述垃圾回收槽;本发明提供的水面智能清理机器人,能够在水体中作业,能够将水体中的垃圾通过电动伸缩杆和电动夹收入至垃圾回收槽内,通过超声波感应器进行垃圾定位,其操作简单,使用智能,可以在湖泊、河道、湿地进行工作使用,能够有效的对水面垃圾及污物进行快速清理和回收。
15.本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
16.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
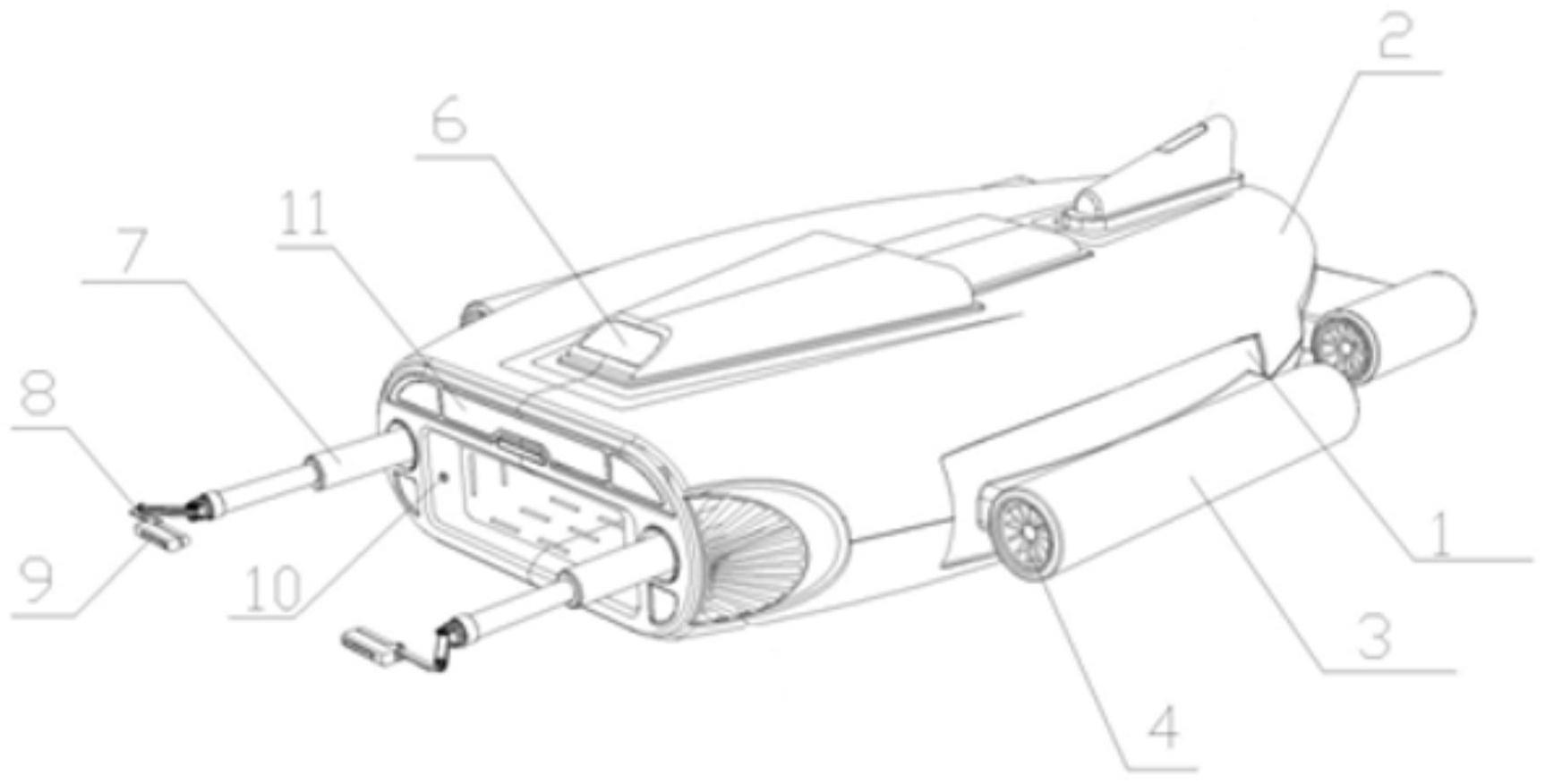
17.图1是本发明提供的水面智能清理机器人第一种视角下的结构图;
18.图2是本发明提供的水面智能清理机器人第二种视角下的结构图。
19.附图标记说明
20.其中,1
‑
动力推进机构,2
‑
壳体,3
‑
驱动壳体,4
‑
推动转轮,6
‑
全景摄像头,7
‑
电动伸缩杆,8
‑
电动夹,9
‑
超声波感应器,10
‑
感应器,11
‑
前光照灯,13
‑
充电口,14
‑
充电按钮,15
‑
后光照灯,16
‑
垃圾回收舱口。
具体实施方式
21.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
22.如图1和2所示:本发明提供了一种水面智能清理机器人,所述水面智能清理机器人包括壳体2,所述壳体2内设置有主控制模块,所述壳体2的端部向内凹陷形成有垃圾回收槽20,所述壳体2中靠近所述垃圾回收槽20处设置有与所述主控制模块相连接的电动伸缩杆7,所述电动伸缩杆7的端部设置有与所述主控制模块相连接的电动夹8,所述电动夹8的端部设置有与所述主控制模块相连接的超声波感应器9,当所述超声波感应器9感应到周围垃圾时,通过所述主控制模块控制所述电动夹8将所述垃圾夹紧,并通过所述主控制模块控制所述电动伸缩杆7进行伸缩,以将垃圾收入所述垃圾回收槽20。本发明提供的水面智能清理机器人,能够在水体中作业,能够将水体中的垃圾通过电动伸缩杆和电动夹收入至垃圾
回收槽内,通过超声波感应器进行垃圾定位,其操作简单,使用智能,可以在湖泊、河道、湿地进行工作使用,能够有效的对水面垃圾及污物进行快速清理和回收。
23.在本发明的一种优选的实施方式中,为了使得电动夹8和电动伸缩杆7将垃圾送入至垃圾回收槽20后能够进行自动复位,所述垃圾回收槽20的开口处设置有与所述主控制模块相连接的感应器10,当所述电动夹8靠近所述感应器10时,能够通过所述主控制模块分别控制所述电动夹8和所述电动伸缩杆7复位。这里的电动夹8和电动伸缩杆7可以为本领域公知的类型,只要能够分别满足夹取和伸缩功能即可。
24.在本发明的一种优选的实施方式中,为了方便整个装置在水体上行走,所述壳体2的两侧分别设置有动力推进机构1。
25.在本发明的一种优选的实施方式中,所述动力推进机构1包括设置在所述壳体2两侧的驱动壳体3,所述驱动壳体3内设置有驱动电机,所述驱动电机的输出轴连接有推动转轮4,所述驱动电机和所述主控制模块相连接。壳体2内的主控制模块能够控制驱动电机的启停和转速,便于控制该装置在水体上行走。
26.在本发明的一种优选的实施方式中,为了给予驱动电机、电动夹、电动伸缩杆等内部元件提供电力,保证内部元件正常作业,所述壳体2内设置有与所述主控制模块相连接的充电模块。
27.在本发明的一种优选的实施方式中,为了便于对内部的充电模块进行充电作业,所述壳体2中远离所述垃圾回收槽20的一端固定有与所述充电模块电连接的充电口13和充电按钮14。
28.在本发明的一种优选的实施方式中,为了方便对装置的运行状态进行监控,所述壳体1的上端设置有与所述主控制模块相连接的全景摄像头6。
29.在本发明的一种优选的实施方式中,为了方便对水体进行照明,便于夜间作业,所述壳体2的两端分别设置有前光照灯11和后光照灯15。
30.在本发明的一种优选的实施方式中,为了方便将垃圾从壳体2内进行回收,所述壳体2中远离所述垃圾回收槽20的一端形成有与其相连通的垃圾回收舱口16。
31.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
32.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
33.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。