1.本技术涉及计算机和机器人领域,尤其是一种仿鱼鱼尾装置及其控制方法。
背景技术:
2.随着科技的发展,机器人的研发技术愈发成熟,机器人在日常生活中也愈发普遍,比如展会上的接待机器人、农业上的各种功能性机器人以及仿生机器人等等,但大多数机器人均采用刚性材料制成,且体型较大,无法满足一些特殊空间的工作条件。为满足特殊工作环境,衍生出了仿生机器人。
3.柔性机器人,凭借着柔韧性强、安全性高、结构精巧等优势,逐渐成为机器人的一个重要发展方向,柔性仿生鱼则是柔性机器人中较为重要且常见的一种机器人。柔性机器人的材料多为智能材料,能感知外部的一些刺激,比如磁场、外力、温度等等,然后做出相应的反应。其中,ipmc材料就是较为典型的一种柔性材料,ipmc材料由基体聚合物和镀在基膜两侧的贵金属电极构成。该材料会在低压直流电以及水环境的作用下,因内部水合阳离子以及溶剂分子的迁移导致材料向阳极发生弯曲变形,因而可用于驱动。
4.仿生鱼的研究最早由麻省理工大学引起,各大研究机构与高校也开始着手仿生鱼机器人的研发。在国外,美国、日本是对仿生鱼机器人研究最为深入的国家。麻省理工率先研发出金枪鱼机器人,其目的旨在研发一种高效的水下推进器,日本名古屋大学的教授用形状记忆合金研发出一种微型仿生机器鱼。而我国的仿生鱼研究起步较慢,且仿生鱼机器人多采用多关节串并联结构,此结构装置搭建较为复杂,并且机械传动效率较大,控制难度大大增大;且驱动还是采用传统的机械式驱动方法,增加了机器人的重量,且耗电,且噪音较大,不利于水下探测。
技术实现要素:
5.本技术所要解决的技术问题是克服上述背景技术的不足,提供基于ipmc柔性驱动器仿鱼鱼尾装置;该装置仿照鱼尾外形与鱼尾运动,在激励信号的作用下,该装置能模仿鱼尾的摆动方式,从而推进整个装置前进。
6.本技术提供的技术方案是:
7.一种仿鱼鱼尾装置,其特征在于:包括鱼尾本体、放置板和控制器,所述控制器设置在放置板上,所述控制器与鱼尾本体电连接;所述控制器包括电连接的电源、稳压装置、信号放大装置和单片机,用于给所述鱼尾本体供电,所述电源、稳压装置、信号放大装置分别与单片机电连接,所述电池安装在放置板的左侧,所述放置板中间固定信号放大装置,所述放置板的右边放置稳压装置;所述鱼尾本体由 ipmc柔性材料制成,鱼尾的末端为两个三角状组成。所述仿鱼鱼尾安装在仿生鱼的尾部。
8.进一步地,所述鱼尾本体前翼与信号放大装置用两根电线相互连接。
9.进一步地,所述单片机采用stm32。
10.一种控制如上上述所述的仿鱼鱼尾装置的方法,其特征在于:
11.包括以下步骤:(1)按下电源开关,电源给整个装置供电,单片机stm32输出5v,1hz的方波信号,稳压装置稳定电压,信号放大器将单片机stm32输出的方波信号进行放大处理,放大后的驱动信号经两根电线传输到鱼尾本体上,由ipmc柔性材料制成的鱼尾本体接收到相关信号时,鱼尾本体发生宏观上的弯曲变形,鱼尾本体后翼朝向右边偏转;
12.鱼尾本体在接收到经信号放大器处理过的反向信号后,鱼尾本体恢复原状并向左发生弯曲变形,在方波信号的激励下,鱼尾本体发生朝右再朝左的往复运动,推动整个装置的前进。
13.进一步地,在运动过程中可以通过调节电压与频率控制装置的前进速度;调高装置的电压,弯曲变形的程度增大,摆动的幅度也就随之增大,游动的速度加快;或者当施加信号的电压幅值相同时,信号频率越低,产生的弯曲变形的位移会增大,加快游动速度。
14.进一步地,所述两根电线用绝缘胶带分别缠绕起来。
15.本技术的工作原理是:按下电源开关后,低压直流电源开始供电,稳压装置将输出电压维持在一个固定值内,单片机产生一种激励信号,正弦波或者方波,通过信号放大装置将信号放大,通过两根电线传送到鱼尾上。由ipmc材料制备的鱼尾在接收到驱动信号后,鱼尾后翼向一侧先产生弯曲变形,再恢复原状,然后往另一侧弯曲,往复运动,模拟鱼尾活动。
16.本技术所达到的有益效果:本技术模拟鱼尾外形利用ipmc材料制成鱼尾,依靠材料在水环境下通电变形的特点,实现鱼尾的摆动,从而实现高效率的推进;通过改变电压与频率大小,实现改变鱼尾的摆动幅度,从而控制装置的前进速度,且不采用传统机械式驱动,减轻质量,减少电源耗费,利于水下长时间运行。控制器以单片机为主,控制电压与频率大小,同时配置稳压装置,令输出电压稳定,保证装置正常工作。本技术结构简单,机动性高且无噪声等污染,为仿生机器鱼的研究提供新的思路与实例,对水下推进器做了更加深入的研究与推广。
附图说明
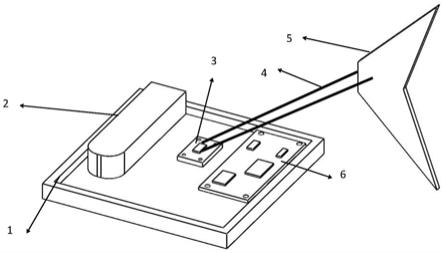
17.图1为本技术实施例的立体结构示意图。
18.图2为本技术仿生鱼尾右偏结构示意图。
19.图3为本技术仿生鱼尾左偏结构示意图。
20.图4为本技术仿生鱼尾正常状态结构示意图。
21.其中:1
‑
放置板;2
‑
电池;3
‑
信号放大装置;4
‑
电线;5
‑
鱼尾本体;6
‑
稳压装置。
具体实施方式
22.下面结合附图对本技术作进一步描述。以下实施例仅用于更加清楚地说明本技术的技术方案,而不能以此来限制本技术的保护范围。
23.一、基于ipmc柔性驱动器仿鱼鱼尾装置
24.如图1所示,基于ipmc柔性驱动器和计算机技术的一种仿鱼鱼尾5装置,包括ipmc驱动控制器和鱼尾本体5。鱼尾本体5由ipmc 柔性材料制成,鱼尾本体5后翼为两个三角装置,仿照鱼尾本体5的外形。鱼尾本体5前翼的左右两侧分别与电线4连接,电线4的另一端连接至放置板1上的信号放大器上,用于传输经信号放大器放大的信号至鱼尾本体5,驱动鱼尾本体5摆动,电线4的外侧用绝缘胶带缠绕起来,保护装置安全。放置板1上安装单片机,用
于电压、频率的调节(图中没有显示);放置板1的一侧安装一块电池2,用于整个装置的供电。放置板1中间放置一块信号放大器,用于将单片机输出的激励信号放大,将更大的驱动信号传送到鱼尾本体5上。放置板 1的另一侧固定稳压装置6,将输出的电压维持在一个固定值,维持装置的正常运行。
25.如图4所示,非工作状态下以及工作间隙,鱼尾本体5保持正常状态,鱼尾本体5后翼不会向两侧弯曲变形。此时整个鱼尾本体5 在同一平面。
26.仿鱼鱼尾装置的控制方法:按下电源开关(图中省略),电源给整个装置供电,单片机stm32,图中省略,输出5v,1hz的方波信号,稳压装置6稳定电压,信号放大器将单片机stm32输出的方波信号进行放大处理,放大后的驱动信号经两根电线4传输到鱼尾本体5 装置上,由ipmc柔性材料制成的鱼尾本体5接收到相关信号时,鱼尾本体5发生宏观上的弯曲变形,鱼尾本体5后翼朝向右边偏转,如图2所示。
27.鱼尾本体5装置在接收到经信号放大器处理过的反向信号后,鱼尾本体5恢复原状并向左发生弯曲变形,如图3所示。在方波信号的激励下,鱼尾本体5发生朝右再朝左的往复运动,推动整个装置在海水里高效率的前进。在运动过程中可以通过调节电压与频率控制装置的前进速度。调高装置的电压,弯曲变形的程度增大,摆动的幅度也就随之增大,游动的速度加快。或者当施加信号的电压幅值相同时,信号频率越低,产生的弯曲变形的位移会增大,也能达到加快游动速度的效果。
28.本技术所达到的有益效果:本技术模拟鱼尾外形利用ipmc材料制成鱼尾,依靠材料在水环境下通电变形的特点,实现鱼尾的摆动,从而实现高效率的推进;通过改变电压与频率大小,实现改变鱼尾的摆动幅度,从而控制装置的前进速度,且不采用传统机械式驱动,减轻质量,减少电源耗费,利于水下长时间运行。控制器以单片机为主,控制电压与频率大小,同时配置稳压装置,令输出电压稳定,保证装置正常工作。本技术结构简单,机动性高且无噪声等污染,为仿生机器鱼的研究提供新的思路与实例,对水下推进器做了更加深入的研究与推广。
29.以上所述仅是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本技术的保护范围。