1.本实用新型涉及水下机器人领域的装置,尤其涉及一种水下机器人回收装置。
背景技术:
2.水下机器人广泛应用于各行各业的水下探测、采样及测绘等工作,但在水体环境不明确或是水下环境恶劣的环境中使用时很容易造成水下机器人损坏最终沉底。
3.水下机器人造价昂贵且损坏沉底之后很难进行打捞,或是打捞自身成本也很高,因此,需要一种更加高效的水下机器人回收装置。
技术实现要素:
4.本实用新型的目的在于提供一种水下机器人回收装置,以解决现有技术中的水下机器人在损坏沉底之后难以回收的问题。本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
5.为实现上述目的,本实用新型提供了以下技术方案:
6.本实用新型提供的一种水下机器人回收装置,包括:过滤结构、壳体结构、动作结构及产气结构,其中,
7.所述壳体结构包括耐压壳体及活塞板,所述耐压壳体为一端开口的圆筒状结构,所述活塞板密封滑动设置在所述耐压壳体的内壁上且所述活塞板将所述耐压壳体内部空间分割成设备腔和水仓两部分,所述设备腔内设置有蓄电池及主机,所述主机内设置有电路板,所述电路板上集成有无线接收模块且所述无线接收模块与所述蓄电池电性连接,所述过滤结构固设在所述耐压壳体的开口端,所述动作结构和所述产气结构均设置在所述设备腔内。
8.优选地,所述动作结构包括齿条、减速电机及齿轮,两个所述减速电机垂直固设在所述设备腔的侧壁上且所述减速电机的主轴上固设有所述齿轮,所述齿条上下两侧均为轮齿结构且所述齿条垂直固设在所述活塞板位于所述设备腔内的所述活塞板的侧壁上,两个所述齿轮分别与所述齿条上下两面的轮齿结构啮合,两个所述减速电机均与所述无线接收模块和所述蓄电池电性连接。
9.优选地,所述产气结构包括伸缩电机、刺针、泄气孔、气室壳体、固定壳体、溢流孔、稀盐酸及碳酸钠,所述气室壳体的顶壁开设有所述泄气孔及刺针孔,所述伸缩电机固设在所述气室壳体的顶端且所述伸缩电机的伸缩杆能在所述刺针孔内自由伸缩,所述伸缩电机的伸缩杆前端固设有所述刺针,所述固定壳体顶壁开设有与所述刺针对应的通孔且所述固定壳体底面开设有多个所述溢流孔,所述固定壳体内放置有用弹性塑料膜密封包裹的所述稀盐酸且所述固定壳体固设在所述气室壳体的内侧壁上,所述气室壳体内放置有所述碳酸钠,所述伸缩电机与所述无线接收模块及所述蓄电池均电性连接。
10.优选地,所述过滤结构包括支撑筒、铁丝网、过滤布及活性炭,用于阻挡大块杂物所述铁丝网固设在所述支撑筒的一端,两块所述过滤布平行设置在所述支撑筒内且所述过
滤布与所述支撑筒内壁密封连接,两块所述过滤布之间填充有所述活性炭,所述支撑筒远离所述铁丝网的所述支撑筒的端部与所述耐压壳体开口端密封连接。
11.本实用新型提供的一种水下机器人回收装置有益效果是:该装置可以通过远程操作使得损坏的水下机器人自动浮起进行回收,避免了机器人内部数据的丢失,降低了由于机器人不能回收导致的巨额经济损失。
附图说明
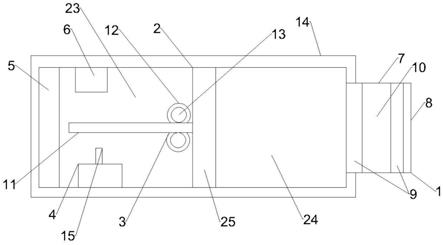
12.图1是本实用新型水下机器人回收装置的主视结构示意图。
13.图2是本实用新型水下机器人回收装置的产气结构示意图。
14.图中:1、过滤结构;2、壳体结构;3、动作结构;4、产气结构;5、蓄电池;6、主机;7、支撑筒;8、铁丝网;9、过滤布;10、活性炭;11、齿条;12、减速电机;13、齿轮;14、耐压壳体;15、伸缩电机;16、刺针;17、泄气孔;18、气室壳体;19、固定壳体;20、溢流孔;21、稀盐酸;22、碳酸钠;23、设备腔;24、水仓;25、活塞板。
具体实施方式
15.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
16.下面参照附图详细地说明本实用新型的具体实施方式。在各附图中,相同的附图标记表示相同或相应的技术特征。各附图仅作为示意图,并非一定按实际比例绘制的。
17.参见图1及图2,如图所示水下机器人回收装置,包括:过滤结构1、壳体结构2、动作结构3及产气结构4,壳体结构2包括耐压壳体14及活塞板25,耐压壳体14为一端开口的圆筒状结构,活塞板25密封滑动设置在耐压壳体14的内壁上且活塞板25将耐压壳体14内部空间分割成设备腔23和水仓24两部分,设备腔23内设置有蓄电池5及主机6,主机6内设置有电路板,电路板上集成有无线接收模块且无线接收模块与蓄电池5电性连接,过滤结构1固设在耐压壳体14的开口端,动作结构3和产气结构4均设置在设备腔23内。
18.动作结构3包括齿条11、减速电机12及齿轮13,两个减速电机12垂直焊接固设在设备腔23的侧壁上且减速电机12的主轴上焊接固设有齿轮13,齿条11上下两侧均为轮齿结构且齿条11垂直焊接固设在活塞板25位于设备腔23内的活塞板25的侧壁上,两个齿轮13分别与齿条11上下两面的轮齿结构啮合,两个减速电机12均与无线接收模块和蓄电池5电性连接。
19.产气结构4包括伸缩电机15、刺针16、泄气孔17、气室壳体18、固定壳体19、溢流孔20、稀盐酸21及碳酸钠22,气室壳体18的顶壁开设有泄气孔17及刺针孔,伸缩电机15焊接固设在气室壳体18的顶端且伸缩电机15的伸缩杆能在刺针孔内自由伸缩,伸缩电机15的伸缩杆前端焊接固设有刺针16,固定壳体19顶壁开设有与刺针16对应的通孔且固定壳体19底面开设有多个溢流孔20,固定壳体19内放置有用弹性塑料膜密封包裹的稀盐酸21且固定壳体19焊接固设在气室壳体18的内侧壁上,气室壳体18内放置有碳酸钠22,伸缩电机15与无线接收模块及蓄电池5均电性连接。
20.过滤结构1包括支撑筒7、铁丝网8、过滤布9及活性炭10,用于阻挡大块杂物铁丝网8焊接固设在支撑筒7的一端,两块过滤布9平行设置在支撑筒7内且过滤布9与支撑筒7内壁密封连接,两块过滤布9之间填充有活性炭10,支撑筒7远离铁丝网8的支撑筒7的端部与耐压壳体14开口端密封连接。
21.在机器人落水时向电路板上集成的无线接收模块发送信号,控制减速电机12和伸缩电机15动作,气室壳体18产生气体填充设备腔23配合活塞板25向右移动排出水,自动浮起。
22.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种水下机器人回收装置,其特征在于,包括:过滤结构(1)、壳体结构(2)、动作结构(3)及产气结构(4),其中,所述壳体结构(2)包括耐压壳体(14)及活塞板(25),所述耐压壳体(14)为一端开口的圆筒状结构,所述活塞板(25)密封滑动设置在所述耐压壳体(14)的内壁上且所述活塞板(25)将所述耐压壳体(14)内部空间分割成设备腔(23)和水仓(24)两部分,所述设备腔(23)内设置有蓄电池(5)及主机(6),所述主机(6)内设置有电路板,所述电路板上集成有无线接收模块且所述无线接收模块与所述蓄电池(5)电性连接,所述过滤结构(1)固设在所述耐压壳体(14)的开口端,所述动作结构(3)和所述产气结构(4)均设置在所述设备腔(23)内。2.根据权利要求1所述的水下机器人回收装置,其特征在于:所述动作结构(3)包括齿条(11)、减速电机(12)及齿轮(13),两个所述减速电机(12)垂直固设在所述设备腔(23)的侧壁上且所述减速电机(12)的主轴上固设有所述齿轮(13),所述齿条(11)上下两侧均为轮齿结构且所述齿条(11)垂直固设在所述活塞板(25)位于所述设备腔(23)内的所述活塞板(25)的侧壁上,两个所述齿轮(13)分别与所述齿条(11)上下两面的轮齿结构啮合,两个所述减速电机(12)均与所述无线接收模块和所述蓄电池(5)电性连接。3.根据权利要求1所述的水下机器人回收装置,其特征在于:所述产气结构(4)包括伸缩电机(15)、刺针(16)、泄气孔(17)、气室壳体(18)、固定壳体(19)、溢流孔(20)、稀盐酸(21)及碳酸钠(22),所述气室壳体(18)的顶壁开设有所述泄气孔(17)及刺针孔,所述伸缩电机(15)固设在所述气室壳体(18)的顶端且所述伸缩电机(15)的伸缩杆能在所述刺针孔内自由伸缩,所述伸缩电机(15)的伸缩杆前端固设有所述刺针(16),所述固定壳体(19)顶壁开设有与所述刺针(16)对应的通孔且所述固定壳体(19)底面开设有多个所述溢流孔(20),所述固定壳体(19)内放置有用弹性塑料膜密封包裹的所述稀盐酸(21)且所述固定壳体(19)固设在所述气室壳体(18)的内侧壁上,所述气室壳体(18)内放置有所述碳酸钠(22),所述伸缩电机(15)与所述无线接收模块及所述蓄电池(5)均电性连接。4.根据权利要求1所述的水下机器人回收装置,其特征在于:所述过滤结构(1)包括支撑筒(7)、铁丝网(8)、过滤布(9)及活性炭(10),用于阻挡大块杂物所述铁丝网(8)固设在所述支撑筒(7)的一端,两块所述过滤布(9)平行设置在所述支撑筒(7)内且所述过滤布(9)与所述支撑筒(7)内壁密封连接,两块所述过滤布(9)之间填充有所述活性炭(10),所述支撑筒(7)远离所述铁丝网(8)的所述支撑筒(7)的端部与所述耐压壳体(14)开口端密封连接。
技术总结
本实用新型提供了一种水下机器人回收装置,尤其涉及水下机器人领域。以解决现有技术中存在的水下机器人在损坏沉底之后难以回收的问题,包括:过滤结构、壳体结构、动作结构及产气结构,壳体结构包括耐压壳体及活塞板,耐压壳体为一端开口的圆筒状结构,活塞板密封滑动设置在耐压壳体的内壁上且活塞板将耐压壳体内部空间分割成设备腔和水仓两部分。该装置可以通过远程操作使得损坏的水下机器人自动浮起进行回收,避免了机器人内部数据的丢失,降低了由于机器人不能回收导致的巨额经济损失。失。失。
技术研发人员:张妍
受保护的技术使用者:苏州光熙智能科技有限公司
技术研发日:2021.01.08
技术公布日:2021/12/7