一种ai智能识别无人船
技术领域
1.本实用新型涉及智能无人船领域,尤其涉及一种ai智能识别无人船。
背景技术:
2.无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,英文缩写为usv。现今,不少国家已开始研制无人船。一些船业巨头甚至乐观预测:也许只需几十年,发展成熟的“幽灵船”技术将改写全球远洋运输的面貌。
3.无人船的应用领域正在不断拓展,无论是行业无人船还是消费无人船都得到长足的进步,在各个应用领域中都开始广泛应用。但是,现有的无人船通常采用相机进行图像采集后与常规图像进行对比,以自主识别路况并控制无人船调节航行速度或方向。但是,当无人船在航行路况复杂的航道上航行时,由于相机捕捉到的图像数据与常规图像有较大差异,容易导致无人船难以及时规避风险障碍,导致无人船容易受损或偏离航向。
技术实现要素:
4.为了克服现有技术的缺陷,本实用新型所要解决的技术问题在于提出一种ai智能识别无人船,采用云台相机、船控模块、服务器以及无人船体相结合的结构,使ai智能识别无人船可以根据采集到的实时图像数据,及时作出响应以完成规避障碍、水面物体识别,航行过程更安全智能。
5.为达此目的,本实用新型采用以下技术方案:
6.本实用新型提供的一种ai智能识别无人船,包括无人船体以及船控模块,船控模块用以控制无人船体的运行,无人船体的仓顶上固定有用以实时回传图像数据的云台相机,船控模块的信号端分别与云台相机的信号端以及服务器的信号端进行信息传输,以便船控模块根据云台相机回传的实时图像数据控制无人船体进行响应处理。
7.本实用新型优选地技术方案在于,云台相机包括旋转云台以及摄像组件,旋转云台的一端与摄像组件可拆卸连接,旋转云台的另一端固定在无人船体的仓顶上,旋转云台的信号端以及摄像组件的信号端分别与船控模块的信号端电性连接,服务器的信号端与船控模块的信号端进行信息通讯。
8.本实用新型优选地技术方案在于,船控模块包括主控模块以及船控通讯模块,主控模块与船控通讯模块电性连接,主控模块的信号端通过船控通讯模块与服务器的信号端进行信息通讯,旋转云台的信号端以及摄像组件的信号端分别与主控模块的信号端电性连接。
9.本实用新型优选地技术方案在于,船控模块还包括gps模块,gps模块与主控模块电性连接。
10.本实用新型优选地技术方案在于,服务器包括ai分析处理模块以及服务端通讯模块,ai分析处理模块通过服务端通讯模块与船控通讯模块进行信息通讯,以智能反馈学习
结果。
11.本实用新型优选地技术方案在于,旋转云台通过支架固定在无人船体的仓顶上。
12.本实用新型的有益效果为:
13.云台相机用以采集实时航行图像数据,并可以及时将实时图像数据传输给船控模块,再传输给远程的服务器进行识别分析。其中,船控模块可以通过云台相机智能识别常规航行图像,以自主自动通过控制无人船及时规避有风险的障碍物。当船控模块难以识别采集的图像时,船控模块可以及时将实时图像数据传输给远程的服务器进行识别分析,以评判航行中的障碍物是否会影响无人船的正常航行,并将分析学习结果反馈给船控模块,以控制无人船体及时规避有风险的障碍物。通过上述过程,使ai智能识别无人船可以根据采集到的实时图像数据,及时作出响应以完成规避障碍、水面物体识别,避免无人船受损或偏离航向,航行过程更安全智能。
附图说明
14.图1是本实用新型具体实施方式中提供的ai智能识别无人船的船体结构示意图;
15.图2是图1中a部分的ai智能识别无人船的船体结构放大图;
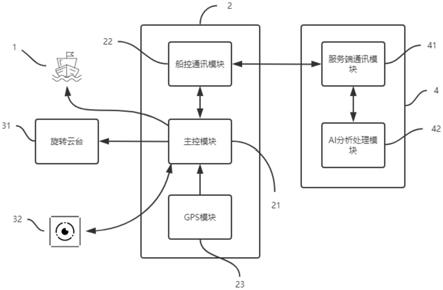
16.图3是本实用新型具体实施方式中提供的ai智能识别无人船的控制模块传输示意图。
17.图中:
18.1、无人船体;2、船控模块;21、主控模块;22、船控通讯模块;23、gps模块;3、云台相机;31、旋转云台;32、摄像组件;33、支架;4、服务器;41、ai分析处理模块;42、服务端通讯模块。
具体实施方式
19.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
20.如图1至图3所示,为了使ai智能识别无人船可以根据采集到的实时图像数据,及时作出响应以完成规避障碍、水面物体识别,航行过程更安全智能,进一步地,本实施例中提供的一种ai智能识别无人船,包括无人船体1以及船控模块2,船控模块2用以控制无人船体1的运行,无人船体1的仓顶上固定有用以实时回传图像数据的云台相机3,船控模块2的信号端分别与云台相机3的信号端以及服务器4的信号端进行信息传输,以便船控模块2根据云台相机3回传的实时图像数据控制无人船体1进行响应处理。云台相机3用以采集实时航行图像数据,并可以及时将实时图像数据传输给船控模块2,再传输给远程的服务器4进行识别分析。其中,船控模块2可以通过云台相机3智能识别常规航行图像,以自主自动通过控制无人船及时规避有风险的障碍物。当船控模块2难以识别采集的图像时,船控模块2可以及时将实时图像数据传输给远程的服务器4进行识别分析,以评判航行中的障碍物是否会影响无人船的正常航行,并将分析学习结果反馈给船控模块2,以控制无人船体1及时规避有风险的障碍物。通过上述过程,使ai智能识别无人船可以根据采集到的实时图像数据,及时作出响应以完成规避障碍、水面物体识别,避免无人船受损或偏离航向,航行过程更安全智能。
21.优选地,云台相机3包括旋转云台31以及摄像组件32,旋转云台31的一端与摄像组
件32可拆卸连接,旋转云台31的另一端固定在无人船体1的仓顶上,旋转云台31的信号端以及摄像组件32的信号端分别与船控模块2的信号端电性连接,服务器4的信号端与船控模块2的信号端进行信息通讯。摄像组件32用以采集实时图像数据,旋转云台31用以带动摄像组件32进行360度自由旋转,船控模块2用以接收或发送信号,以控制旋转云台31的转向或者分析摄像组件32所采集的图像数据,同时船控模块2可以根据云台相机3传输的图像数据或者服务器4传输的反馈学习结果,控制无人船体1及时规避有风险的障碍物。
22.优选地,船控模块2包括主控模块21以及船控通讯模块22,主控模块21与船控通讯模块22电性连接,主控模块21的信号端通过船控通讯模块22与服务器4的信号端进行信息通讯,旋转云台31的信号端以及摄像组件32的信号端分别与主控模块21的信号端电性连接。船控通讯模块22用以使主控模块21与服务器4之间可以进行信息数据的及时交互。主控模块21用以控制旋转云台31的转向、分析处理摄像组件32所采集的图像数据或者分析处理服务器4传输的反馈学习结果,同时主控模块21可以根据摄像组件32传输的图像数据或者服务器4传输的反馈学习结果,控制无人船体1及时规避有风险的障碍物。
23.优选地,船控模块2还包括gps模块23,gps模块23与主控模块21电性连接。gps模块23用以识别实时地理位置信息,并将实时地理位置数据传输给主控模块21进行分析处理,以通过船控通讯模块22传输给服务器4进行位置识别和分析响应处理。
24.优选地,服务器4包括ai分析处理模块41以及服务端通讯模块42,ai分析处理模块41通过服务端通讯模块42与船控通讯模块22进行信息通讯,以智能反馈学习结果。服务端通讯模块42用以使主控模块21通过船控通讯模块22与ai分析处理模块41之间可以进行信息数据的及时交互。ai分析处理模块41用以根据传输的图像数据进行实时分析学习,以评判航行中的障碍物是否会影响无人船的正常航行,并将分析学习结果通过服务端通讯模块42以及船控通讯模块22反馈给主控模块21,以控制无人船及时规避有风险的障碍物。而且,可以根据需求远程控制云台相机3的旋转角度、摄像模式或者通过主控模块21控制无人船体1的航行状态。
25.优选地,旋转云台31通过支架33固定在无人船体1的仓顶上。支架33用以定位装配旋转云台31,方便云台相机3与无人船体1进行拆装配合。
26.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本实用新型保护的范围。