1.本实用新型涉及通信浮标,具体地说是一种可自主潜浮的虚拟锚系通信浮标,适用于海面环境参数移动观测和水面水下联合作业。
背景技术:
2.浮标是进行海洋观测及研究的重要手段,主要以固定锚系浮标为主。固定锚系浮标的主要特点是采用海底固定的方式系留海面浮标在固定的位置进行海洋数据观测,这对海洋观测的位置选择、范围及效果都有一定的限制。当前,锚系浮标或漂流浮标多数需投放后,经过一段时间的数据采集或者遇到特殊破坏性天气前需要进行打捞,浪费了大量人力财力。现代海洋观测中急需一种能够自主应对恶劣天气、无需深海系泊,且具有运动控位能力的海洋观测浮标装备。
技术实现要素:
3.为了满足现代海洋观测的需要,本实用新型的目的在于提供一种可自主潜浮的虚拟锚系通信浮标。
4.本实用新型的目的是通过以下技术方案来实现的:
5.本实用新型包括水面浮体、用于动力输送和信息传递的铠装系缆及用于转化波浪能为驱动力的水下游体,其中水面浮体与水下游体通过铠装系缆相连;
6.所述水面浮体包括浮体舱,该浮体舱外分别设有gps/铱星天线、动中通、无限图传天线、进气阀组及管路、太阳能板、气囊、气动泵阀组和外油囊,所述浮体舱内分别设有控制器、内油囊、液压泵阀组及电池组,所述电池组分别与太阳能板及控制器相连,所述gps/铱星天线、动中通、无限图传天线、进气阀组及管路和气动泵阀组分别与控制器连接,所述进气阀组及管路的进口连接大气,出口与所述气动泵阀组的进口连接,该气动泵阀组的出口与所述气囊入口相连;所述内油囊通过液压泵阀组与外油囊连接;
7.所述水下游体包括游体支架及分别安装在游体支架上的翼板、声通通信机、光纤连接器和转向舵机机构,该游体支架与铠装系缆的下端相连,所述游体支架上安装有多个翼板,每个所述翼板的两端端部均连接有翼板边缘封板;所述声通通信机、光纤连接器及转向舵机机构分别通过铠装系缆与所述控制器连接。
8.其中:所述浮体舱的上部固接有气囊保护罩,所述气囊容置于该气囊保护罩内,所述太阳能板固定在气囊保护罩及浮体舱上。
9.所述浮体舱为空心圆柱结构,所述气囊保护罩的外径大于浮体舱的外径,所述电池组安装于浮体舱内的底部。
10.所述浮体舱顶部设有上舱盖,所述动中通固定在该上舱盖上,所述动中通的底座上安装有所述gps/铱星天线,所述无限图传天线和进气阀组及管路分别安装于gps/铱星天线的天线杆上。
11.所述浮体舱内安装有波浪传感器,该波浪传感器与所述控制器连接。
12.所述浮体舱的外侧壁上安装有保型导流罩,该浮体舱的底部设有下舱盖,所述下舱盖上分别固接有连接架及底部导流罩,所述连接架与铠装系缆的上端相连,所述外油囊位于底部导流罩内。
13.所述铠装系缆包括系缆接插件线缆、硫化扁平线缆、挂接铰链及浮体连接架挂耳,所述游体支架及浮体舱的底部分别安装有浮体连接架挂耳,每个所述浮体连接架挂耳上均铰接有挂接铰链,所述硫化扁平线缆的两端分别与两个挂接铰链相连,该硫化扁平线缆的上端通过系缆接插件线缆与所述控制器连接,所述硫化扁平线缆的下端通过系缆接插件线缆与所述声通通信机、光纤连接器及转向舵机机构相连。
14.所述游体支架为上下两层,两层所述游体支架错落布置,任意一层的所述游体支架上安装有姿态传感器,该姿态传感器通过所述铠装系缆与所述控制器相连。
15.所述转向舵机机构包括密封舱、舵机控制器、转向舵机、舵片、水密接插件、传动机构及输出轴,该密封舱固定在所述游体支架上,所述密封舱内分别安装有舵机控制器及转向舵机,该舵机控制器通过所述密封舱上设置的水密接插件与铠装系缆连接,所述转向舵机与舵机控制器相连,所述输出轴的一端转动安装于密封舱上,另一端位于所述密封舱外部、并连接有舵片,所述转向舵机的输出端通过位于所述密封舱内的传动机构与输出轴相连。
16.所述传动机构为锥齿轮传动机构,即包括锥齿轮a及锥齿轮b,所述锥齿轮a与转向舵机的输出端相连,所述锥齿轮b安装于输出轴上,并与所述锥齿轮a啮合传动。
17.本实用新型的优点与积极效果为:
18.1.本实用新型的水面浮体为圆柱结构,通过不等径圆柱设计和低重心布置,具有较好的吸收波浪力和抗摇特性,具有优于船体结构稳性性能,有利于信息传输;本实用新型设有浮力调节气囊机构和辅助调节油囊机构,具有自潜浮定深功能。
19.2.本实用新型的水下游体通过铠装系缆与水面浮体相连接,通过拖曳光纤与海底目标通信,游体支架采用双层错落布置,增大运动性能,采用姿态传感器和转向舵机机构控制水下游体姿态,牵引水面游体运动,实现自守位功能。
20.3.本实用新型安装有光纤通信、水声通信设备,具备与深海目标通信功能;同时水面安装无限图传及动中通视频传输设备,可实现水面水下远程通信,具有较好的深海自守位无人值守通信中继功能。
附图说明
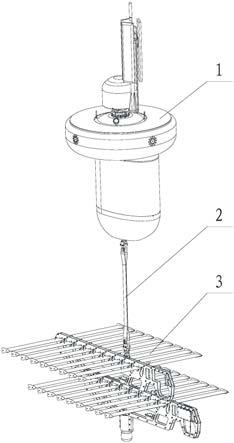
21.图1为本实用新型的整体结构示意图;
22.图2为本实用新型水面浮体的内部结构示意图;
23.图3为本实用新型水下游体的结构示意图;
24.图4为本实用新型的结构主视图;
25.图5为本实用新型的结构右视图;
26.图6为本实用新型的结构俯视图;
27.图7为本实用新型转向舵机机构的结构示意图;
28.图8为本实用新型铠装系缆的结构示意图;
29.其中:1为水面浮体,101为gps/铱星天线,102为动中通,103为无限图传天线,104
为进气阀组及管路,105为太阳能板,106为气囊保护罩,107为气囊,108为气动泵阀组,109为控制器,110为内油囊,111为液压泵阀组,112为电池组,113为波浪传感器,114为外油囊,115为保型导流罩,116为连接架,117为底部导流罩,118为浮体舱,119为上舱盖,120为支架;
30.2为铠装系缆,201为系缆接插件线缆,202为硫化扁平线缆,203为挂接铰链,204为浮体连接架挂耳;
31.3为水下游体,301为翼板,302为游体支架,303为姿态传感器,304为声通通信机,305为光纤连接器,306为转向舵机机构,3061为密封舱,3062为舵机控制器,3063为转向舵机,3064为舵片,3065为水密接插件,3066为锥齿轮a,3067为锥齿轮b,3068为输出轴,307为翼板边缘封板,
具体实施方式
32.下面结合附图对本实用新型作进一步详述。
33.如图1、图2、图4~6所示,本实用新型包括水面浮体1、铠装系缆2及水下游体3,其中水面浮体1为水密结构的圆柱耐压舱体,采用气囊和气囊保护罩布置于水面附近,用于吸收波浪能与防撞;水下游体3用于转化波浪能为驱动力,为双层错落布置结构;铠装系缆2为水面浮体1和水下游体3的连接纽带,通过方向铰链连接水面浮体1和水下游体3,用于动力输送和信息传递。具体结构为:
34.如图1、图4~6所示,本实施例的水面浮体1包括浮体舱118,该浮体舱118外分别设有gps/铱星天线101、动中通102、无限图传天线103、进气阀组及管路104、太阳能板105、气囊保护罩106、气囊107、气动泵阀组108、外油囊114、保型导流罩115、连接架16和底部导流罩117,浮体舱118内分别设有控制器109、内油囊110、液压泵阀组111、电池组112、波浪传感器113和支架12。本实施例的浮体舱118为空心圆柱结构,顶部设有上舱盖119、底部设有下舱盖;浮体舱118的上部固接有气囊保护罩106,气囊107容置于该气囊保护罩106内,太阳能板105固定在气囊保护罩106及浮体舱118上。动中通102通过螺栓固定在上舱盖119上,动中通102的底座上通过螺栓固定有gps/铱星天线101,无限图传天线103和进气阀组及管路104分别固定在gps/铱星天线101的天线杆上。浮体舱118内设有支架120,该支架120通过螺栓固定在下舱盖上,控制器109、内油囊110、液压泵阀组111、电池组112及波浪传感器113分别安装在支架120上。本实施例的气囊保护罩106的外径大于浮体舱118的外径,通过气囊107及气囊保护罩106构建上粗下细的变直径浮体结构,用于更好地吸收波浪能;电池组112位于浮体舱118内的底部,使水面浮体的重心降低。电池组112分别与太阳能板105及控制器109相连,gps/铱星天线101、动中通102、无限图传天线103、进气阀组及管路104、气动泵阀组108和波浪传感器113分别与控制器109连接,进气阀组及管路104的进口连接大气,出口与气动泵阀组108的进口连接,该气动泵阀组108的出口与气囊107入口相连。浮体舱118的外侧壁上安装有保型导流罩115,下舱盖上分别固接有连接架116及底部导流罩117;通过保型导流罩115和底部导流罩117构建水下导流结构,用于缓解圆柱绕流,提高运动稳定性。连接架116与铠装系缆2的上端相连,外油囊114位于底部导流罩117内,内油囊110通过液压泵阀组111与外油囊114连接,液压泵阀组111具有压力检测的深度传感器,用于检测浮标入水深度。本实施例的进气阀组及管路104、气动泵阀组108、液压泵阀组111及控制器109均为现
有技术,在此不再赘述。
35.如图1、图2及图4~7所示,本实施例的铠装系缆2包括系缆接插件线缆201、硫化扁平线缆202、挂接铰链203及浮体连接架挂耳204,游体支架302及浮体舱118底部的连接架116上分别安装有浮体连接架挂耳204,每个浮体连接架挂耳204上均铰接有挂接铰链203,硫化扁平线缆202的两端分别与两个挂接铰链203相连,该硫化扁平线缆202的上端通过系缆接插件线缆201与控制器109连接,硫化扁平线缆202的下端通过系缆接插件线缆201分别与姿态传感器303、声通通信机304、光纤连接器305及转向舵机机构306相连。
36.水下游体3是本实用新型的驱动力来源,如图1、图2、图3~6及图8所示,本实施例的水下游体3包括游体支架302及分别安装在游体支架302上的翼板301、姿态传感器303、声通通信机304、光纤连接器305和转向舵机机构306,该游体支架302与铠装系缆2的下端相连,游体支架302上安装有多个翼板301,每个翼板301的两端端部均连接有翼板边缘封板307,用于提高翼板301水动力性能。本实施例的游体支架302为上下两层,两层游体支架302错落布置,用于提高波浪能转化能力,任意一层的游体支架302上安装有姿态传感器303,声通通信机304、光纤连接器305及转向舵机机构306分别安装于下层的游体支架302上,声通通信机304及光纤连接器305用于深海目标通信机数据传输。
37.本实施例的转向舵机机构306包括密封舱3061、舵机控制器3062、转向舵机3063、舵片3064、水密接插件3065、传动机构及输出轴3068,该密封舱3061固定在游体支架302上,采用铝合金加工而成,密封舱3061内分别安装有舵机控制器3062及转向舵机3063,该舵机控制器3062通过密封舱3061上设置的水密接插件3065与硫化扁平线缆202下端的系缆接插件线缆201连接,进行数据通信,转向舵机3063与舵机控制器3062相连,输出轴3068的一端转动安装于密封舱3061上,另一端位于密封舱3061外部、并连接有舵片3064,转向舵机3063的输出端通过位于密封舱3061内的传动机构与输出轴3068相连。本实施例的传动机构为锥齿轮传动机构,即包括锥齿轮a3066及锥齿轮b3067,锥齿轮a3066与转向舵机3063的输出端相连,锥齿轮b3067安装于输出轴3068上,并与锥齿轮a3066啮合传动。本实施例的姿态传感器303、声通通信机304及光纤连接器305均为现有技术,在此不再赘述。
38.本实用新型的工作原理为:
39.在连接好光纤并将设备上电检查正常后布放到指定海域。通过控制中心远程下达工作位置点指令,gps/铱星天线101接收指令并传输到控制器109,控制器109再将指令传输给舵机控制器3062,通过舵机控制器3062控制转向舵机3063工作,驱动舵片3064转动,进而控制水下游体3运动。水下游体3带动水面浮体1在工作位置点附近自守位运动,通过声通通信机304和光纤与海底目标设备通信及信息传递,通过动中通102以及无限图传天线103与控制中心进行信息交互。
40.在长时间担当通信中继角色过程中,如波浪传感器113检测到波浪较大,判断海面环境恶劣,则打开水面桅杆的进气阀组,驱动气动泵阀组108由气囊107向外排气增大浮标吃水,直至浮标上表面的太阳能板105全部没入水中,关闭进气阀组,通过控制液压泵阀组111由外油囊114向内油囊110回油,并时刻检测浮标入水深度,达到指定深度后,通过控制液压泵阀阀组111并保持深度避险。
41.待设定时间后,控制液压泵阀组111由内油囊110向外油囊114排油,使得浮标上浮至水面露出进气阀组及管路104,检测海面波浪情况判断是否上浮;若不具备上浮条件则继
续下潜到指定深度避险,若具备上浮条件则打开进气阀组,驱动气动泵阀组108由外界向气囊107内吸气,直至浮标上浮到指定吃水深度,关闭气动泵阀组108和进气阀组,同时通过gps/铱星天线101向控制中心发送状态信息,时刻等待指令并继续控制水下游体3驱动水面浮体1在设定位置点进行自守位通信作业。