一种plc智能教具
技术领域
1.本发明涉及教学焦距教具技术领域,更具体地说,是涉及一种plc智能教具。
背景技术:
2.plc控制是通过一种可编程的存储器,在内部存储过程中执行各种操作的指令,通过数字方式或模拟方式控制机械设备的一种控制方式。智能小车则一种现代智能设备,能够按照预先设置的运动模式在一定的环境中工作,不需要认为管理,逐渐在各行业中推广应用。上述二者具有一定的相似性与关联性,且无论是plc控制还是近年流行的智能小车,均在自动化生产与自动化管理中具有一定的地位,因此为培养相关职业人才的教育机构,如大学、职业学校等,均将plc控制与智能小车纳入专业教育的一部分。
3.然而,目前国内使用plc控制的教具基本为工业设备淘汰产品,设备体积较大,使用灵活性低,自主创造设计难度高,导致学生学习时无从下手,不知所措,非常不利于学生进行完善的系统性学习。
4.以上不足,有待改进。
技术实现要素:
5.为了克服现有的技术的不足,本发明提供一种plc智能教具。
6.本发明技术方案如下所述:
7.一种plc智能教具,包括由电路板形成的车体,所述电路板内置电源模块与plc控制模块,所述车体上设置超声波模块、循迹模块及电机驱动模块,所述plc控制模块分别连接所述超声波模块、所述循迹模块及所述电机驱动模块,在所述电源模块的驱动下,所述plc控制模块接收所述超声波模块与所述循迹模块的反馈信号并形成控制信号发送至所述电机驱动模块,所述车体在所述电机驱动模块的带动下运动。
8.上述的一种plc智能教具,当所述电源模块的电源开关启动时,所述plc控制模块控制所述电机驱动模块,所述电机驱动模块启动并带动所述车体沿着舵机指引方向运动;所述plc控制模块根据所述循迹模块的反馈控制所述车体沿着轨道运动,使得所述车体的转向始终朝向所述循迹模块检测的轨道方向。
9.进一步的,当所述超声波模块在设定距离范围内检测到障碍物时,所述plc控制模块控制所述车体转向左侧,直至所述超声波模块在设定距离范围内未检测到障碍物,所述plc控制模块控制所述车体转向右侧。
10.进一步的,当所述循迹模块在设定时间范围内未检测到轨道时,所述plc控制模块控制所述电机驱动模块关闭,所述车体停止运动。
11.上述的一种plc智能教具,所述超声波模块内置超声控制电路,所述超声控制电路通过trig端子发出第一高电平信号,所述超声波模块的发射器输出若干个高频方波,高频方波遇到障碍物以后,所述超声波模块的接收器自动检测有无返回的高频信号,当所述接收器检测到有高频信号返回时,所述超声控制电路输出第二高电平信号,检测过程持续时
间为输出所述第二高电平信号的时间,所述plc控制模块根据音速与所述第二高电平信号的输出时间,从而得出障碍物的间隔距离。
12.上述的一种plc智能教具,所述电源模块内置电源电路,所述电源电路包括可充锂电池,所述可充锂电池包括第一供电接口、第二供电接口及第三供电接口,所述第二供电接口与所述第三供电接口均接地,所述第一供电接口分别连接plc控制模块与降压稳压器的一端,所述降压稳压器的另一端连接输出电路。
13.上述的一种plc智能教具,所述循迹模块包括循迹电路,所述循迹电路包括若干个红外探头与运算放大器,所述运算放大器的输入端分别连接所述红外探头的接收端,所述运算放大器的输出端连接所述plc控制模块。
14.进一步的,所有所述红外探头均包括发射端与所述接收端,所述发射端的一端与所述接收端的一端均连接同一输出电路,所述发射端的另一端经由发射电阻接地,所述接收端的另一端经由接收电阻接地。
15.进一步的,所述红外探头经由输出电路分别形成三个不同的循迹接口,每个所述循迹接口经红外指示灯与红外电阻连接输出电路,三个所述循迹接口与红外指示灯的电路为并联。
16.进一步的,所述运算放大器分别与三个红外探头的接收端连接,其中一个与所述红外探头的接收端连接引脚的相邻引脚连接所述红外探头对应的所述循迹接口,另一相邻引脚连接滑动电阻的滑动端,所述滑动电阻的固定端的一侧连接输出电路,另一侧接地。
17.进一步的,所述红外探头分别设置在所述车体的左侧方、正前方及右侧方,左侧方的所述红外探头输出第一正相信号或第一反相信号,正前方的所述红外探头输出第二正相信号或第二反相信号,右侧方的所述红外探头输出第三正相信号或第三反相信号;
18.当所述运算放大器获得所述第一正相信号、所述第二反相信号及所述第三反相信号时,所述plc控制模块通过所述电机驱动模块控制所述车体左转;
19.当所述运算放大器获得所述第一反相信号、所述第二正相信号及所述第三反相信号时,所述plc控制模块通过所述电机驱动模块控制所述车体运动方向不变;
20.当所述运算放大器获得所述第一反相信号、所述第二反相信号及所述第三反相信号时,所述plc控制模块通过所述电机驱动模块控制所述车体右转。
21.再进一步的,当所述运算放大器获得所述第一正相信号、所述第二正相信号及所述第三反相信号时,所述plc控制模块通过所述电机驱动模块控制所述车体左转并减小转动幅度;
22.当所述运算放大器获得所述第一反相信号、所述第二正相信号及所述第三正相信号时,所述plc控制模块通过所述电机驱动模块控制所述车体右转并减小转动幅度。
23.上述的一种plc智能教具,所述电机驱动模块包括电机驱动电路,所述电机驱动电路包括电机驱动器,所述电机驱动器与所述plc控制模块连接,所述电机驱动器经由接口连接所述车体的驱动电机,所述plc控制模块经所述电机驱动器调整所述接口的输出电平信号,从而控制所述驱动电机的转速。
24.进一步的,其中一个所述驱动电机经第一接口、第二接口连接所述电机驱动器,另一个所述驱动电机经第三接口、第四接口连接所述电机驱动器,
25.当所述第一接口与所述第三接口输出高电平信号,所述第二接口与所述第四接口
输出低电平信号时,所述车体表现为直线行进;
26.当所述第一接口与所述第三接口输出低电平信号,所述第二接口与所述第四接口输出高电平信号时,所述车体表现为后退;
27.当所述第一接口与所述第四接口输出高电平信号,所述第二接口与所述第三接口输出低电平信号时,所述车体表现为左转;
28.当所述第一接口与所述第四接口输出低电平信号,所述第二接口与所述第三接口输出高电平信号时,所述车体表现为右转;
29.当所述第一接口、所述第二接口、所述第三接口及所述第四接口同时输出低电平信号时,所述车体表现为停止。
30.根据上述方案的本发明,其有益效果在于,本发明将plc控制所学的结构缩减,令其集成于一辆智能小车上,满足plc操作的各项硬件要求,并利用plc控制模块满足学生编程搭建的需求,减少了高校的教学成本,提高了教学效率,让学生可以亲自实践,不必纠结于书本原理和电脑仿真,不但能够提高了学生对plc课程的直观认知,而且能大大提高学生的学习热情和学习效率。
附图说明
31.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
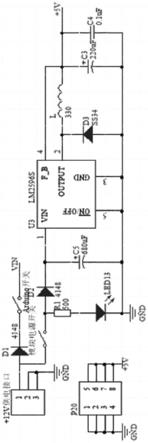
32.图1为电源电路的电路结构示意图。
33.图2为循迹模块的循迹电路结构示意图。
34.图3为电机驱动电路结构示意图。
具体实施方式
35.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
36.需要说明的是,当部件被称为“固定”或“设置”或“连接”另一个部件,它可以直接或者间接位于该另一个部件上。术语“上”、“下”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”等仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多”的含义是二或二以上,除非另有明确具体的限定。“若干”的含义是一或一以上,除非另有明确具体的限定。
37.一种plc智能教具,如图1所示,包括由电路板形成的车体、设置在车体两侧的车轮及设置在车体前端的舵机,电路板内置plc控制模块,plc控制模块连接设置在车体两侧的红外探头,plc控制模块连接并控制与车轮连接的驱动电机,驱动电机经由舵机带动车轮运动。
38.在本技术中,智能小车需要做到的动作为直行、转弯及提前探知反馈信号,具体表
现为:(1)沿着规定线路移动;(2)躲避沿线阻碍移动的物体。智能小车的制作分为硬件部分与软件部分,一方面需要考虑实现运动的智能小车的机械结构,另一方面需要设计控制运动的电路。
39.硬件方面,本技术直接使用电路板作为车身,所有的控制器件与电子元件均暴露在空气中,一方面能够减少外壳等制作,节省制作成本,简化学生在不关键的部分浪费过多的时间,另一方面,减少外壳能够提高各种感应器的感应灵敏度,有利于智能小车的反馈控制,将实验影响因素缩减,有效减少学生的设计问题,将学生需要考虑的设计问题局限在运动硬件与软件控制的配合上。同时,裸露的车身能够直观地令教师检查并进行指导,也方便学生实现即时修改与改进。为节省车体占有面积,令车体在运动过程更为灵活,更适应校内较小的实验空间,将电路板叠放形成多层结构,电路板之间设置铜制的螺柱形成三角支撑结构,连接螺柱的两端分别与上下两层电路板通过螺钉连接。
40.智能小车的运动通过设置在两侧的车轮与设置在前端的舵机控制,车轮与舵机形成三角结构支撑智能小车电路板,在运动过程中,前端的舵机起到引导方向的作用。两侧的车轮通过细小的齿轮组合连接直流的驱动电机,驱动电机通过凸字形固定扣件设置在下层电路板的下表面,从而将车轮与车轮的驱动源固定在电路板上。而舵机则通过螺栓连接固定在电路板的下部。出于缩小车体的整体占用面积、保护车轮等考虑,将电路板做成带蝠翼的形状,两侧端弯曲形成框槽,将车轮置于该框槽内部。
41.在本技术中,辅助开发套件包括电源模块、舵机、usb线、杜邦线、电机、车轮、arduino uno开发板、超声波模块、舵机、pcb板、电烙铁、镊子、焊锡、吸锡带及万用表,具体的名称与数量如下表所示:
42.[0043][0044]
(1)电源模块
[0045]
小车电源采用12v可充高容量锂电池,12v直流电源再经降压、稳压输出一路+5v电源,降压、稳压通过lm2596s降压稳压器实现。在电路设计时,提供两路电源设计可供大电流器件和arduino uno开发板分开供电,防止大电流器件对arduino uno开发板形成干扰。
[0046]
(2)arduino uno开发板(plc控制模块)
[0047]
plc控制模块是智能小车的控制中心,在本技术中采用arduino uno开发板。arduino是一款常见的入门开发板,在使用时,仅需了解各端口作用即可在开发平台上进行控制语言设计。除此之外,设置在电路板与arduino uno开发板上的各模块的输入输出端进行不固定布线,端口布线为引出模式,便于智能小车的成品可作为单片机教育的综合载体。
[0048]
arduino uno开发板可直接通过c语言编写控制内容,在本技术中,智能小车的控制条件如下:
[0049]
当电源开关启动时,智能小车上的驱动电机启动,带动智能小车沿着其车轮与舵
机的方向运动;
[0050]
当超声波模块在设定距离范围内检测到障碍物时,智能小车转向左侧,直至超声波模块在设定距离范围内未检测到障碍物,智能小车转向右侧;
[0051]
智能小车的转向始终朝向循迹模块检测的轨道方向;
[0052]
当循迹模块在设定时间范围内未检测到轨道时,智能小车上的驱动电机关闭,智能小车停止运动。
[0053]
(3)超声波模块
[0054]
本技术选用hc-sr04超声波模块,安装在智能小车的正前端,利用超声波传输距离宽与测距精度高的优点,经过超声控制电路,令超声波模块的发射器不断向智能小车的前端发送超声波,当超声波遇到障碍物时,经过障碍物的反射与散射后,超声波模块的接收器接收到返回的超声波,向超声控制电路反馈超声波控制信号。
[0055]
具体的,超声控制电路通过trig端子发出第一高电平信号,发射器输出若干个高频方波,遇到障碍物以后,接收器自动检测有无返回的高频信号,当检测到有高频信号返回时,超声控制电路输出第二高电平信号,检测过程持续时间为输出第二高电平信号的时间,根据音速,从而得出障碍物的间隔距离。
[0056]
(4)循迹模块
[0057]
在本技术中,智能小车的沿线设计为白底黑线,意味着智能小车需要沿着黑线进行运动,关于色彩方面的设计常用为红外探测法,利用红外线在不同颜色的物体表面具有不同的反射强度的特点,令智能小车在运动过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫反射,遇到黑线则被吸收,漫反射产生的光被智能小车的红外接收器吸收,吸收的红外光则没有返回,二者之间的返回特征产生循迹信号,循迹信号经反相器整形后送到plc控制模块,plc控制模块根据反相的循迹信号判断黑线的所在位置。
[0058]
(5)舵机
[0059]
本技术中智能小车的转向物理结构通过舵机实现,舵机能够通过程序连续控制转角,从而实现转向要求。
[0060]
(6)电机驱动模块
[0061]
智能小车采用直流的驱动电机作为动力器件,电机的旋转方向和速度是两个需要控制的重要参数,将智能小车经由电机驱动器连接plc控制模块,使得小电流的plc控制模块能够驱动大电流的直流的驱动电机。
[0062]
各模块的线电路设计如下。
[0063]
(1)电源电路
[0064]
在本技术中,电源模块使用12v可充锂电池作为电源,其12v直流电源经过lm2596s降压稳压器进行输出5v电压。
[0065]
如图1所示,电源电路包括可充锂电池,所述可充锂电池包括第一供电接口、第二供电接口及第三供电接口,所述第二供电接口与所述第三供电接口均接地,所述第一供电接口分别经由第一二极管连接plc控制模块与经由电源开关连接降压稳压器。
[0066]
所述第一二极管的阳极连接所述第一供电接口,所述第一二极管的阴极经由控制开关连接plc控制模块的引脚。
[0067]
所述电源开关的一端连接所述第一供电接口,另一端分别连接第二二极管的阳极
与第一电阻的一端,所述第二二极管的阴极分别连接所述降压稳压器的第一脚与经由第五电容接地,所述第一电阻的另一端经由电源指示灯接地。
[0068]
所述降压稳压器的第二脚分别经由第三二极管的阴极接地与电感的一端连接。
[0069]
所述降压稳压器的第三脚与所述降压稳压器的第五脚均接地。
[0070]
所述降压稳压器的第四脚分别连接所述电感的另一端、经第三电容接地、经第四电容接地及输出电路。
[0071]
所述输出电路的电压为5v。
[0072]
电源电路的验证:开启所述电源开关,所述电源指示灯发光,使用万用表测试“+5v”“gnd”是否存在5v电压输出。
[0073]
(2)循迹模块
[0074]
本技术的红外循迹模块采用高发射功率的红外光电二极管与高灵敏度光电晶体管组成的红外探头tcrt5000,该红外探头既是红外发射器也是红外接收器,其获得的循迹信号经由lm324运算放大器放大,并发送至plc控制模块中。
[0075]
循迹电路如下:
[0076]
如图2所示,所述循迹电路包括三个红外探头,所有所述红外探头均包括发射端与接收端,所述发射端的一端与所述接收端的一端均连接同一输出电路,所述发射端的另一端经由发射电阻接地,所述接收端的另一端经由接收电阻接地。
[0077]
所述红外探头经由输出电路分别形成三个不同的循迹接口,每个所述循迹接口经红外指示灯与红外电阻连接输出电路,三个循迹接口与红外指示灯的电路为并联。
[0078]
lm324运算放大器分别与三个红外探头的接收端连接,其中一个与红外探头的接收端连接引脚的相邻引脚连接所述红外探头对应的所述循迹接口,另一相邻引脚连接滑动电阻的滑动端,滑动电阻的固定端的一侧连接输出电路,另一侧接地。
[0079]
lm324运算放大器将三个红外探头接收的信号形成循迹信号,三个红外探头分别返回三个循迹信号,在本技术中,三个红外探头分别设置在智能小车车身的正前方、左侧方及右侧方,三个循迹信号分别存在接收到少量反射光或接收到大量反射光两种情况,分别为第一正相信号、第一反相信号、第二正相信号、第二反相信号、第三正相信号及第三反相信号,正相信号为探测到黑线的反馈信号,反相信号为为探测到白线的反馈信号。当lm324运算放大器获得第一正相信号、第二反相信号及第三反相信号时,左侧方的红外探头探测到黑色轨道,智能小车的控制行进方向应为左转;当lm324运算放大器获得第一反相信号、第二正相信号及第三反相信号时,正前方的红外探头探测到黑色轨道,智能小车的行进方向不变;当lm324运算放大器获得第一反相信号、第二反相信号及第三反相信号时,右侧方的红外探头探测到黑色轨道,智能小车的控制行进方向应为向右转;当lm324运算放大器获得第一正相信号、第二正相信号及第三反相信号时,左侧方与正前方的红外探头均探测到黑色轨道,表明智能小车正在向左修复轨道完成,应逐渐缩小智能小车的左转幅度,并逐渐调整方向向正前方偏移;当lm324运算放大器获得第一反相信号、第二正相信号及第三正相信号,右侧方与正前方的红外探头均探测到黑色轨道,表明智能小车正在向右修复轨道完成,应逐渐缩小智能小车的右转幅度,并逐渐调整方向向正前方偏移。
[0080]
(3)电机驱动电路
[0081]
为了令plc控制模块能够支撑驱动电机的所需电流,在plc控制模块与驱动电机之
间设置有电机驱动器,从而形成电机驱动电路。
[0082]
如图3所示,电机驱动电路包括电机驱动器。
[0083]
所述电机驱动器的第一脚依次经过第十六电阻、第十七电阻接地。
[0084]
所述电机驱动器的第二脚分别经第二十电阻连接输出电路与经第二三极管的发射极、所述第二三极管的集电极后接地。
[0085]
所述电机驱动器的第三脚连接驱动电机的第一接口后经过第一电容、所述驱动电机的第二接口返回所述电机驱动器的第六脚。
[0086]
所述电机驱动器的第四脚与所述电机驱动器的第五脚相连后接地。
[0087]
所述电机驱动器的第七脚经过第十九电阻、所述第二三极管的基极及所述第二三极管的集电极后接地。
[0088]
所述电机驱动器的第八脚连接电源电路。
[0089]
所述电机驱动器的第九脚经第二十三电阻、第十八电阻接地。
[0090]
所述电机驱动器的第十脚经第二十二电阻、第三三极管的基极及第三三极管的集电极后接地。
[0091]
所述电机驱动器的第十一脚经所述驱动电机的第三接口、第二电容、所述驱动电机的第四接口后返回所述电机驱动器的第十四脚。
[0092]
所述电机驱动器的第十二脚与所述电机驱动器的第十三脚连接后均接地。
[0093]
所述电机驱动器的第十五脚分别连接第二十一电阻的另一端与所述第三三极管的发射极。
[0094]
所述电机驱动器的第十六脚分别连接所述输出电路与所述第二十一电阻的一端。
[0095]
本技术中的智能小车为后轮驱动,表现为两个驱动电机分别输入两个接口,即第一接口与第二接口为其中一个电机,第三接口与第四接口为另一个电机。通过后轮驱动后,前端设置有舵机引导方向,从而完成动作。
[0096]
当智能小车表现为直线行进时,第一接口与第三接口输出高电平信号,第二接口与第四接口输出低电平信号;当智能小车表现为后退时,第一接口与第三接口输出低电平信号,第二接口与第四接口输出高电平信号;当智能小车表现为左转时,第一接口与第四接口输出高电平信号,第二接口与第三接口输出低电平信号;当智能小车表现为右转时,第一接口与第四接口输出低电平信号,第二接口与第三接口输出高电平信号;当智能小车表现为停止时,第一接口、第二接口、第三接口及第四接口同时输出低电平信号。
[0097]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。