1.本发明涉及无人机仿真技术领域,具体涉及一种综合式视觉反馈的无人机巡线仿真培训系统。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.现有的无人机巡线仿真培训系统在培训人员的过程中缺乏大数据传递设备,对于线缆易损伤且难以定位之处缺乏记录措施,导致人员在巡线时不能重点检查该处,影响巡线的效果。
4.如中国专利cn102163381a,公开日2011年8月24日,一种无人机电力巡线仿真培训系统,其包括:外部信号输入装置、虚拟仿真训练计算机,含有用于所述外部信号输入装置接入以获取外部命令并解析的外部信号识别模块,以及与该外部信号识别模块连接的三维虚拟现实仿真模块和数据存储及数据处理模块,其中所述三维虚拟现实仿真模块与所述数据存储及数据处理模块互联,依据接收到的外部命令提取所述数据存储及数据处理模块的数据生成仿真描述数据,以描述当前无人机的场景和电力环境,并建立内部对象响应机制;以及音视频输出设备。其存在缺乏大数据传递设备,对于线缆易损伤且难以定位之处缺乏记录措施的问题,导致无人机操作员无法针对不同状况进行重点飞行训练,训练提升效果不明显。
技术实现要素:
5.本发明要解决的技术问题是:目前的无人机巡线仿真培训系统存在巡检效率低、人员的培训效率不高的技术问题。提出了一种能够通过大数据联通系统与服务器数据连接的方式提高巡检效率和人员培训效率的综合式视觉反馈的无人机巡线仿真培训系统。
6.为解决上述技术问题,本发明所采取的技术方案为:一种综合式视觉反馈的无人机巡线仿真培训系统,包括仿真培训系统、大数据联通系统和服务器,所述仿真培训系统通过大数据联通系统与服务器连接,所述仿真培训系统包括硬件在环系统,所述硬件在环系统包括模拟器、遥控器和飞行控制器,所述硬件在环系统通过模拟器、遥控器和飞行控制器进行场景环境模拟。
7.一种综合式视觉反馈的无人机巡线仿真培训系统,包括仿真培训系统、大数据联通系统和服务器,所述仿真培训系统通过大数据联通系统与服务器无线连接,所述仿真培训系统采用仿真引擎+飞行控制器的解决方案,所述仿真培训系统为一个硬件在环系统,所述硬件在环系统包括模拟器、遥控器和飞行控制器,所述硬件在环系统通过模拟器、遥控器和飞行控制器模拟高难度场景环境并减少硬件在环系统的开发周期,所述仿真培训系统包括耐张塔培训、直线塔培训和aopa培训。
8.作为优选,所述服务器包括大数据收发单元、大数据存储单元、大数据分析单元和
大数据模拟单元,所述大数据收发单元依次与所述大数据存储单元、所述大数据分析单元和所述大数据模拟单元连接,所述大数据模拟单元与所述大数据收发单元连接,所述大数据收发单元通过大数据联通系统将模拟信号输入至仿真培训系统。
9.所述服务器包括大数据收发单元、大数据存储单元、大数据分析单元和大数据模拟单元,所述服务器通过大数据收发单元接收大数据,所述大数据存储单元储存大数据,所述大数据分析单元分析大数据,所述大数据模拟单元模拟数字信号,所述大数据收发单元输出模拟信号至服务器,所述服务器通过大数据联通系统将模拟信号输入至仿真培训系统。
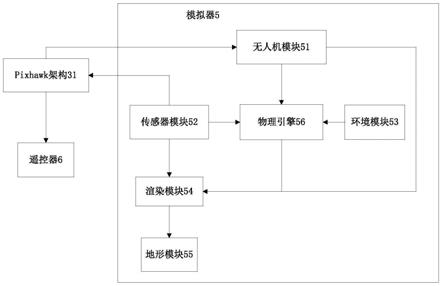
10.作为优选,所述模拟器包括无人机模块、传感器模块、环境模块、地形模块和物理引擎,所述模拟器还包括虚幻引擎,所述虚幻引擎包括渲染模块;所述模拟器的工作过程如下:步骤一:无人机操作员直接操作所述遥控器进行无人机飞行控制;步骤二:遥控器与飞行控制器信号连接,所述遥控器发出控制指令并传递给飞行控制器;步骤三:飞行控制器根据控制指令产生控制无人机电机的脉冲宽度调制信号,并根据所述传感器模块传递的传感器数据进行无人机姿态计算,所述飞行控制器与遥控器产生混控输出指令,飞行控制器将混控输出指令传递给所述无人机模块;步骤四:无人机模块接收到飞行控制器的混控输出指令后进行相应的运动模拟即姿态变换和位置变换;步骤五:传感器模块对无人机传感器进行模拟,并将模拟后的传感器数据传递给物理引擎和飞行控制器进行无人机运动状态计算,然后通过所述渲染模块进行展示,便于无人机操作员实时了解飞行状态,并且可以将传感器数据进行保存,方便后续对无人机飞行训练进行评估;步骤六:环境模块是对无人机飞行训练环境的模拟,通过对无人机飞行训练环境模拟使无人机运动更接近真实运动状态;步骤七:物理引擎综合无人机数据、传感器数据、环境参数进行无人机运动计算并将计算结果传递给虚幻引擎内的渲染模块;步骤八:地形模块对真实地形进行建模并将地形模型导入虚幻引擎中,通过所述虚幻引擎实时渲染使得无人机训练场景更接近真实无人机飞行训练场景;步骤九:渲染模块将地形信息、无人机运动信息进行实时渲染,并将渲染后的逼真视觉信息反馈给无人机操作员,辅助无人机操作员进行飞行训练。
11.实时渲染画面作为一种反馈,让无人机操作员充分了解飞行训练状态,对自身操作水平有直观的了解,可以提高训练效果。
12.作为优选,所述飞行控制器包括pixhawk架构,所述pixhawk架构包括硬件和软件,所述硬件包括stm32f-427处理器和io外设,所述软件包括nuttx实时操作系统、px4中间件和px4飞行控制栈。pixhawk架构由硬件和软件两部分构成。
13.作为优选,所述模拟器将存储的数据传输至仿真培训系统,所述仿真培训系统通过大数据联通系统将存储的数据传输至服务器。
14.所述模拟器存储的本地数据传输至仿真培训系统内部,所述仿真培训系统通过大
数据联通系统将本地数据传输至服务器。
15.作为优选,所述大数据分析单元的分析过程包括:将数据转化为密集点云,根据密集点云覆写并排除干扰项,拾取故障点精准坐标,将精准坐标转化为数字信号。
16.所述大数据收发单元收发本地数据,所述大数据存储单元存储本地数据,所述大数据分析单元分析本地数据将本地数据转化为密集点云,并根据密集点云覆写并排除干扰项,拾取故障点精准坐标,并将精准坐标转化为数字信号。
17.作为优选,所述仿真培训系统包括耐张塔培训、直线塔培训和aopa培训。通过多种培训方式对操作员进行培训。
18.作为优选,所述模拟器设置于无人机内部。
19.大数据模拟单元将数字信号通过大数据收发单元传递至服务器,飞行控制器读写数据,飞行控制器通过混控输出将无线信号传递至模拟器,模拟器通过无人机模块调整无人机飞行位置。
20.作为优选,所述模拟器的工作过程还包括:通过无人机模块控制无人机运动至巡线损伤节点进行巡检记录。可通过无人机模块针对巡线损伤节点进行重点巡检并记录。
21.作为优选,所述模拟器的工作过程还包括:通过渲染模块二次渲染巡线损伤节点,模拟器将渲染结果传递至仿真培训系统。通过渲染模块对巡线损伤节点进行二次,之后将渲染结果传递至仿真培训系统供无人机操作员进行针对训练。
22.本发明的实质性效果是:(1)本发明由于仿真培训系统通过大数据联通系统与服务器数据连接,在培训或实地巡检线缆时,通过大数据可存储巡检信息,从而获悉线缆易损处的坐标和视图信息,便于下次重点查验,有效提升了巡检效率;(2)本发明通过大数据分析单元分析本地数据,并将本地数据转化为密集点云,然后根据密集点云覆写并并排除干扰项,拾取故障点精准坐标,可自动记录故障位置,便于下次自动巡检;(3)本发明通过无人机模块自动控制无人机运动至巡线损伤节点,在巡线培训完毕后可正常实行巡检作业,使得培训和巡检作业有机结合,提升了人员的培训效率。
附图说明
23.图1为本实施例硬件在环系统的组成示意图;图2为本实施例的组成示意图;图3为本实施例飞行控制器的组成示意图。
24.其中:1、仿真培训系统;2、大数据联通系统;3、飞行控制器;31、pixhawk架构;311、硬件;3111、stm32f-427处理器;3112、io外设;312、软件;3121、nuttx实时操作系统;3122、px4中间件;3123、px4飞行控制栈;4、硬件在环系统;5、模拟器;51、无人机模块;52、传感器模块;53、环境模块;54、渲染模块;55、地形模块;56、物理引擎;6、遥控器;7、服务器;71、大数据收发单元;72、大数据存储单元;73、大数据分析单元;74、大数据模拟单元。
具体实施方式
25.下面通过具体实施例,并结合附图,对本发明的具体实施方式作进一步具体说明。
26.一种综合式视觉反馈的无人机巡线仿真培训系统,如图1至图3所示,包括仿真培
训系统1、大数据联通系统2和服务器7,仿真培训系统1通过大数据联通系统2与服务器7无线连接,仿真培训系统采用仿真引擎+飞行控制器3的解决方案,仿真培训系统1为一个硬件在环系统4,硬件在环系统4包括模拟器5、遥控器6和飞行控制器3,硬件在环系统4通过模拟器5、遥控器6和飞行控制器3模拟高难度场景环境并减少硬件在环系统4的开发周期,仿真培训系统1包括耐张塔培训、直线塔培训和aopa培训。
27.在一些实施例中,耐张塔培训包括特高压交流1000千伏耐张塔精细化巡检培训、特高压直流
±
800kv耐张塔精细化巡检培训、超高压交流500kv耐张塔精细化巡检培训、110kv耐张塔精细化巡检培训和220kv耐张塔精细化巡检培训,直线塔培训系统包括特高压交流1000kv直线塔精细化巡检培训、特高压直流
±
800kv直线塔精细化巡检培训、超高压交流500kv直线塔精细化巡检培训、110kv直线塔精细化巡检培训、220kv直线塔精细化巡检培训,换位塔培训系统包括超高压交流500kv换位塔精细化巡检培训,aopa培训系统包括 aopa基础操作培训和 aopa进阶操作培训。
28.在一些较佳的实施例中,特高压交流1000千伏耐张塔精细化巡检培训的功能开发以机巡业务逻辑、安全意识、操控技能三个方面对受训人员进行全面培训,以电力行业、电网公司相关标准为业务指导,全程贯穿安全规程要点及注意事项,通过“教学
→
训练
→
考核
→
强化”的管道式培训模式,达到标准化巡线的目标,利用真实的激光点云数据制作仿真度极高的场景,结合具体的巡线任务,逐步引导受训员工完成巡线任务,特高压直流
±
800kv耐张塔精细化巡检培训、110kv耐张塔精细化巡检培训和220kv耐张塔精细化巡检培训的功能开发均利用真实的激光点云数据制作仿真度极高的场景,结合具体的巡线任务,逐步引导受训员工完成巡线任务,并在飞行过程中提示要点与注意事项,模拟实际巡线作业流程,培训学员巡线技能及对相关规定的理解程度,并对其飞行技能进行评判;使得受训人员更易操作与理解,让学员积累更多实践经验。
29.在一些较佳的实施例中,特高压交流1000kv直线塔精细化巡检培训的功能开发提供训练模式和考核模式。在训练模式中结合实际需要选择机型和场景,在巡线任务的执行过程中,全程都有辅助性的提示,任务完成状态,飞机离地高度以及电池余量等基础信息都显示在屏幕上,在飞机飞行的过程中姿态的变化、云台的调整、摄像机焦距的变化等使用技能,都能在执行任务地过程中快速掌握,特高压直流
±
800kv直线塔精细化巡检培训的功能开发结合具体的巡线任务,研制高技术含量的多旋翼无人机巡线系统,其能够进一步再现多旋翼无人机巡线操纵的过程,使工作人员能够熟悉多旋翼无人机操作、巡线技能,而且工作人员有机会进行反复的技能练习,使执行的任务能够被高效、准确地完成,110kv直线塔精细化巡检培训的功能开发利用真实的激光点云数据制作仿真度极高的场景,结合具体的巡线任务,逐步引导受训员工完成巡线任务,并在飞行过程中提示要点与注意事项;模拟实际巡线作业流程,培训学员巡线技能及对相关规定的理解程度,并对其飞行技能进行评判;使得受训人员更易操作与理解,让学员积累更多实践经验,220kv直线塔精细化巡检培训的功能开发 利用真实的激光点云数据制作仿真度极高的场景,结合具体的巡线任务,逐步引导受训员工完成巡线任务,并在飞行过程中提示要点与注意事项;模拟实际巡线作业流程,培训学员巡线技能及对相关规定的理解程度,并对其飞行技能进行评判;使得受训人员更易操作与理解,让学员积累更多实践经验。
30.在一些较佳的实施例中,超高压交流500kv换位塔精细化巡检培训的功能开发制
作仿真度极高的培训画面,深入实地调研,使用三维建模还原实地场景,并且遵循中电联相关巡线标准,这些巡线流程会被加入到仿真培训系统中,显著提升培训的实用性。
31.在一些较佳的实施例中,aopa基础操作培训的功能开发架空输电线路无人机巡检对作业人员的要求较高,不仅需要操控无人机完成常规飞行动作,还需要具备精湛的技能水平,精准控制无人机到达每一个巡检点位开展作业。为保障作业任务的顺利完成和作业安全,巡检作业人员需要接受相关培训。基础技能培训的主要内容包括起飞降落、静止悬停、多高度悬停、水平移动、45度角悬停、90度角侧向悬停、对角悬停等。在基础技能培训方面,国内外部分制造商研发的飞行模拟器可实现基本的无人机飞行操作培训,但其功能大多比较单一,训练场景简单,且一般仅适用于制造商自身研发的无人机,普适性较差。aopa基础培训的功能开发可开展无人机实际场景作业培训,对无人机的基础操作进行培训,提升受训人员的无人机操作技能,aopa进阶操作培训的功能开发利用无人机进行电力线路的巡视作业,克服了传统电力巡检难度大、成本高、效率低的问题,推进了日常输电设备、线路的精细化管理提高了供电线路的稳定水平,适应了现代化电网建设与发展的需求。但由于无人机巡检技术属于新型技术, 其保护保养调试程序多、飞行操作复杂, 一旦操作失误可能造成巨大的经济损失, 所以对飞控作业人员的技术水平要求很高。 传统的输电线路运维员工与新员工从对无人机技术的一无所知到被培养成合格的飞控作业人员, 学习周期长、难度大、内容繁杂、注意事项多,因此如何建设无人机飞手培训体系从而培养出高飞行控制能力与精湛的技术水平的无人机飞手成为亟须解决的问题。aopa进阶操作培训课件开发涵盖了无人机定向水平圆周飞行、机头向外圆周飞行、短距自由飞行、中远距返航飞行、机头定向8字飞行、第一人称视角飞行、机头向心圆周飞行等功能,帮助有一定无人机飞行基础的人员进一步提升无人机的操作技能,以达到考取aopa证书的目的。
32.在一些较佳的实施例中,超高压交流500kv耐张塔精细化巡检培训和超高压交流500kv直线塔精细化巡检培训的功能开发采用线路图纸实现对常规路线、塔型、地形的准确构建,然后将真实地形进行建模并导入无人机训练场景,使得模拟训练场景可以更加接近实际训练场景,增加无人机操作员训练的沉浸感,增强训练效果;在预知飞行任务区域后,可以针对性的构建任务区域地形和场景进行模拟训练,可以提高任务完成质量和效率。
33.服务器7包括大数据收发单元71、大数据存储单元72、大数据分析单元73和大数据模拟单元74,服务器7通过大数据收发单元71接收大数据,大数据存储单元72储存大数据,大数据分析单元73分析大数据,大数据模拟单元74模拟数字信号,大数据收发单元71输出模拟信号至服务器7,服务器7通过大数据联通系统2将模拟信号输入至仿真培训系统1。
34.大数据收发单元71收发本地数据,大数据存储单元72存储本地数据,大数据分析单元73分析本地数据将本地数据转化为密集点云,并根据密集点云覆写并排除干扰项,拾取故障点精准坐标,并将精准坐标转化为数字信号。大数据模拟单元74将数字信号通过大数据收发单元71传递至服务器7,飞行控制器3读写数据,飞行控制器3通过混控输出将无线信号传递至模拟器5,模拟器5通过无人机模块51调整无人机飞行位置。
35.模拟器5包括无人机模块51、传感器模块52、环境模块53、渲染模块54、地形模块55和物理引擎56,其中飞行控制器3包括pixhawk架构31,pixhawk架构31设置有硬件311和软件312,硬件311包括stm32f-427处理器3111和io外设3112,软件312包括nuttx实时操作系统3121、px4中间件3122和px4飞行控制栈3123。
36.模拟器5存储的本地数据传输至仿真培训系统1内部,仿真培训系统1通过大数据联通系统2将本地数据传输至服务器7,模拟器5可设置于无人机内部。模拟器5工作原理如下:第一步:无人机操作员直接操作遥控器6进行无人机飞行控制,第二步:遥控器6与飞行控制器3信号连接,遥控器6发出控制指令并传递给飞行控制器3,第三步:飞行控制器3根据控制指令产生控制无人机电机的脉冲宽度调制信号,并根据传感器模块52传递的传感器数据进行无人机姿态计算,飞行控制器3与遥控器3产生混控输出指令,飞行控制器3将混控输出指令传递给无人机模块51,第四步:无人机模块51接收到飞行控制器3的混控输出指令后进行相应的运动模拟即姿态变换和位置变换,第五步:传感器模块52对无人机传感器进行模拟,并将模拟后的传感器数据传递给物理引擎56和飞行控制器3进行无人机运动状态计算,然后通过渲染模块54进行展示,便于无人机操作员实时了解飞行状态,并且可以将传感器数据进行保存,方便后续对无人机飞行训练进行评估,第六步:环境模块53是对无人机飞行训练环境的模拟,通过对无人机飞行训练环境模拟使无人机运动更接近真实运动状态,第七步:还包括虚幻引擎,物理引擎56综合无人机数据、传感器数据、环境参数进行无人机运动计算并将计算结果传递给虚幻引擎内的渲染模块54,第八步:地形模块55是对真实地形进行建模并将地形模型导入虚幻引擎中,通过虚幻引擎实时渲染使得无人机训练场景更接近真实无人机飞行训练场景,第九步:渲染模块54将地形信息、无人机运动信息进行实时渲染,并将渲染后的逼真视觉信息反馈给无人机操作员,实时渲染画面作为一种反馈,让无人机操作员充分了解飞行训练状态,对自身操作水平有直观的了解,可以提高训练效果。
37.此外,可通过无人机模块51控制无人机运动至巡线损伤节点。通过渲染模块54二次渲染巡线损伤节点,模拟器5将渲染结果传递至仿真培训系统1。
38.工作时,可利用大数据、服务器与仿真培训系统的设置,对巡检与培训作业进行有机结合,从而提升巡检与培训的效率。
39.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。