1.本发明涉及无人机领域,特别涉及一种基于无人机的测绘装置、电子设备。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作。2013年11月,中国民用航空局下发了《民用无人驾驶航空器系统驾驶员管理暂行规定》,由中国aopa协会负责民用无人机的相关管理。根据《规定》,中国内地无人机操作按照机型大小、飞行空域可分为11种情况,其中仅有116千克以上的无人机和4600立方米以上的飞艇在融合空域飞行由民航局管理,其余情况,包括日渐流行的微型航拍飞行器在内的其他飞行,均由行业协会管理、或由操作手自行负责。
3.应用领域:遥感测绘工作原理:首先说遥感,就是遥远的感知,广义来说,就是你没有到目标区域去,利用遥控技术,进行当地情况的查询。狭义上讲,就是卫星图片及航飞图片。测绘遥感,就是利用遥感技术,在计算机上面进行计算并且能够达到测绘目的行为。
4.测绘用的无人机在飞行时其稳定性较差,受高空的气流影响机身会高频率的晃动,导致测绘出现偏差、模糊,测绘不精确;
5.且测绘用的拍摄相机等机构在转动调节时其稳定性较差,容易偏移时晃动等,机械性较强,缺乏柔顺性,影响测绘使用。
6.因此,发明一种基于无人机的测绘装置、电子设备来解决上述问题很有必要。
技术实现要素:
7.本发明的目的在于提供一种基于无人机的测绘装置、电子设备,以解决上述背景技术中提出的问题。
8.为实现上述目的,本发明提供如下技术方案:一种基于无人机的测绘装置,包括无人机本体,所述无人机本体的底部两侧均设置有无人机支撑腿,所述无人机支撑腿的下方设置有连接板,所述无人机支撑腿上套设有卡套,卡套的底部通过螺钉固定在连接板上,所述连接板的下方设置有维稳机构,所述维稳机构设置有两组,两组维稳机构对称分布,所述维稳机构包括固定焊接在连接板底部的气箱,所述气箱呈矩形箱体结构,气箱的上端外圈处设置有排气管,气箱的下端四角处均设置有进气管,所述排气管和进气管连通,所述气箱的内部设置有驱动机构。
9.优选的,所述驱动机构包括传动单元、扇叶轴、扇叶,所述扇叶轴传动连接在传动单元的上端,扇叶固定焊接在扇叶轴的外圈处,所述维稳机构包括固定焊接在气箱内部的中间支撑板,所述传动单元固定安装在中间支撑板的底部,所述扇叶轴设置于中间支撑板
的上方,扇叶轴活动穿过中间支撑板设置,所述中间支撑板将气箱内部隔成上下分布的出气腔室、进气腔室,所述中间支撑板上设置有多组上下贯穿的进气槽,所述排气管连通出气腔室,所述进气管连通进气腔室。
10.本实施例中,为了解决测绘用的无人机在飞行时其稳定性较差,受高空的气流影响机身会高频率的晃动,导致测绘出现偏差、模糊,测绘不精确的现象,在连接板的下方设置有维稳机构,维稳机构设置有两组,两组维稳机构对称分布,维稳机构包括固定焊接在连接板底部的气箱,气箱呈矩形箱体结构,气箱的上端外圈处设置有排气管,气箱的下端四角处均设置有进气管,排气管和进气管连通,气箱的内部设置有驱动机构;
11.驱动机构包括传动单元、扇叶轴、扇叶,扇叶轴传动连接在传动单元的上端,扇叶固定焊接在扇叶轴的外圈处,维稳机构包括固定焊接在气箱内部的中间支撑板,传动单元固定安装在中间支撑板的底部,扇叶轴设置于中间支撑板的上方,扇叶轴活动穿过中间支撑板设置,中间支撑板将气箱内部隔成上下分布的出气腔室、进气腔室,中间支撑板上设置有多组上下贯穿的进气槽,排气管连通出气腔室,进气管连通进气腔室;
12.当传动单元启动时可通过扇叶轴带动扇叶转动,从而带动无人机本体周围的气流从进气管处进入,然后从排气管处排出,从而从无人机本体侧面推动无人机本体趋于稳定,具体的,可通过控制器控制对应的第二控制单元和第一控制单元打开,从而利用从无人机本体底部吸入的气流从气箱不同侧面推出时的反推力带动无人机本体平稳,避免了无人机本体产生歪斜的现象,保证了无人机本体稳定飞行,受高空快速气流影响较小;
13.且风力被带入气箱中时可增加无人机本体上升及平飞时的动力,充分利用能源,风力从进气管进入进气腔室后经过进气槽进入出气腔室,进入出气腔室中的风力从对应的排气管处排出,第二控制单元和第一控制单元均可使用电磁阀等装置,传动单元可使用电机等装置。
14.优选的,所述排气管设置有多组,多组排气管呈等距离分布在气箱一圈处,所述排气管中设置有第二控制单元,所述进气管中设置有第一控制单元,所述进气管呈弧形的管道结构。
15.需要说明的是,排气管设置有多组,多组排气管呈等距离分布在气箱一圈处,当无人机本体飞行时向右侧歪斜时,可启动此时位于气箱右侧排气管中的第二控制单元和位于气箱左侧的进气管中的第一控制单元,左侧的进气管将无人机本体左侧底部的高气流抽入排气管中排出,从而降低无人机本体左侧底部受高压气流的影响,而此时气流从右侧的排气管排出,增加排气管右侧气流的压力,从而从底部、侧面同时辅助无人机本体稳定飞行。
16.优选的,所述无人机支撑腿呈凹字形结构,无人机支撑腿的截面呈圆形,所述卡套呈半环形结构套设在无人机支撑腿上,卡套的两端均固定设置有通过螺钉固定在连接板表面的固定板。
17.进一步的,无人机支撑腿的整体面积较小,对无人机本体飞行时几乎没有阻力,使得无人机本体飞行时损耗小且可连接连接板,便于安装使用。
18.优选的,所述无人机本体的四角处均设置有飞行桨动力箱,所述飞行桨动力箱中存储有电机,飞行桨动力箱的上方设置有传动连接在电机端部的飞行桨轴,所述飞行桨轴上固定设置有飞行桨。
19.具体的,无人机本体四角处飞行桨动力箱中均设置有电机,方便单独控制每一角
位置的飞行桨转速,从而使得无人机本体换向方便。
20.优选的,所述无人机本体的边缘处设置有弧形面,所述无人机本体呈矩形箱体结构,无人机本体四角处的飞行桨动力箱突出于无人机本体四角处,且无人机本体和飞行桨动力箱整体形成外部在无人机本体每一面弧形凹陷的区域。
21.其中,无人机本体的边缘处设置有弧形面,无人机本体和飞行桨动力箱整体形成外部在无人机本体每一面弧形凹陷的区域,使得无人机本体整体外观边角处流线设置,减少风阻,利于无人机本体高速飞行,节省能源。
22.本发明还公开了一种电子设备,包括如上任一所述的基于无人机的测绘装置,还包括:
23.高清相机,所述高清相机通过调节机构安装在连接板底部,高清相机位于两组维稳机构之间,所述高清相机的外部套设有连接卡套,所述连接卡套的一侧固定焊接有第二驱动轴,所述第二驱动轴的端部传动连接有第二驱动单元,所述连接卡套的外部设置有呈倒置的凹字形结构的连接架,所述第二驱动单元通过驱动单元支撑板固定在连接架的侧面,第二驱动轴活动穿过连接架设置,所述连接板的底部固定焊接有驱动连接架转动的第一驱动单元,所述第一驱动单元的下端通过螺杆固定在安装套环上,安装套环固定焊接在连接架的上表面中部。
24.本实施例中,为了解决测绘用的拍摄相机等机构在转动调节时其稳定性较差,容易偏移时晃动等,机械性较强,缺乏柔顺性,影响测绘使用的现象,在两组维稳机构之间设置有高清相机,高清相机的外部套设有连接卡套,连接卡套的一侧固定焊接有第二驱动轴,第二驱动轴的端部传动连接有第二驱动单元,连接卡套的外部设置有呈倒置的凹字形结构的连接架,第二驱动单元通过驱动单元支撑板固定在连接架的侧面,第二驱动轴活动穿过连接架设置,连接板的底部固定焊接有驱动连接架转动的第一驱动单元,第一驱动单元的下端通过螺杆固定在安装套环上,安装套环固定焊接在连接架的上表面中部;
25.具体的,高清相机的外部通过可弹性变形的气囊卡合在连接卡套中,使得高清相机在转动调节的过程中不易颠簸、晃动,气囊具有良好的缓冲减震作用,且气囊上设置有前后贯穿的导流孔,无人机本体飞行时,作用于高清相机外部的风力会通过导流孔的导向沿着高清相机的外部流出,减少对高清相机形成的阻力,风力经过导流孔导向减少对高清相机进行冲击,使得高清相机拍摄的画面清晰,增加测绘的精确度;
26.且装置中,第一驱动单元可通过第一驱动轴带动连接架、高清相机转动,调节高清相机的朝向,第二驱动单元可通过第二驱动轴带动高清相机转动,调节高清相机的倾斜度,第一驱动单元和第二驱动单元均可使用电机等装置。
27.优选的,所述连接卡套的内部固定设置有气囊,所述气囊上设置有导流孔,导流孔贯穿气囊的前后,导流孔等距离设置有多组,所述气囊的内部设置有充气腔,所述充气腔设置有多组,多组充气腔设置于相邻的导流孔之间,所述气囊的内部层结构中设置有连通在多组充气腔之间的连通气道,所述连接卡套的一侧固定焊接有连通充气腔中的充气单元。
28.需要说明的是,为了增加调节高清相机倾斜度时的顺滑性,在高清相机的外圈处设置有环形卡槽,当高清相机倾斜时,若是高清相机受底部重力过高会一定距离的向下移动,而橡胶卡条卡合在环形卡槽外圈处进行限位,限位卡套在高清相机的端部进行限位,保证了高清相机受力过度时可自动调节距离,不会对高清相机造成硬性损伤等现象,且高清
相机不易脱落。
29.优选的,所述高清相机呈矩形状,高清相机的外圈处设置有环形卡槽,所述环形卡槽沿着高清相机的径向截面分布,环形卡槽等距离设置有多组。
30.进一步的,充气单元可使用气泵等装置,通过充气单元对充气腔中充气时,可使得气囊膨胀变形,从而对高清相机外部形成包覆固定的结构,在高清相机松弛时,可通过充气单元向充气腔中充气加压,且弹性固定的方式减低了对高清相机的损伤。
31.优选的,所述气囊的两端均固定设置有对应卡合在环形卡槽中的橡胶卡条,所述高清相机的前后两端均固定设置有限位卡套,所述限位卡套向高清相机的外圈凸出。
32.其中,无人机本体上的气箱和高清相机结合,可增加测绘时的精确性。
33.本发明的技术效果和优点:
34.1、本发明的一种基于无人机的测绘装置,包括无人机本体,所述无人机本体的底部两侧均设置有无人机支撑腿,所述无人机支撑腿的下方设置有连接板,所述无人机支撑腿上套设有卡套,卡套的底部通过螺钉固定在连接板上,为了解决测绘用的无人机在飞行时其稳定性较差,受高空的气流影响机身会高频率的晃动,导致测绘出现偏差、模糊,测绘不精确的现象,在连接板的下方设置有维稳机构,当传动单元启动时可通过扇叶轴带动扇叶转动,从而带动无人机本体周围的气流从进气管处进入,然后从排气管处排出,从而从无人机本体侧面推动无人机本体趋于稳定,具体的,可通过控制器控制对应的第二控制单元和第一控制单元打开,从而利用从无人机本体底部吸入的气流从气箱不同侧面推出时的反推力带动无人机本体平稳,避免了无人机本体产生歪斜的现象,保证了无人机本体稳定飞行,受高空快速气流影响较小;
35.2、本发明的一种基于无人机的测绘装置,排气管设置有多组,多组排气管呈等距离分布在气箱一圈处,当无人机本体飞行时向右侧歪斜时,可启动此时位于气箱右侧排气管中的第二控制单元和位于气箱左侧的进气管中的第一控制单元,左侧的进气管将无人机本体左侧底部的高气流抽入排气管中排出,从而降低无人机本体左侧底部受高压气流的影响,而此时气流从右侧的排气管排出,增加排气管右侧气流的压力,从而从底部、侧面同时辅助无人机本体稳定飞行;
36.3、本发明的一种基于无人机的测绘装置,无人机本体的边缘处设置有弧形面,无人机本体和飞行桨动力箱整体形成外部在无人机本体每一面弧形凹陷的区域,使得无人机本体整体外观边角处流线设置,减少风阻,利于无人机本体高速飞行,节省能源;
37.4、本发明的一种基于无人机的测绘装置,为了解决测绘用的拍摄相机等机构在转动调节时其稳定性较差,容易偏移时晃动等,机械性较强,缺乏柔顺性,影响测绘使用的现象,在两组维稳机构之间设置有高清相机,高清相机的外部通过可弹性变形的气囊卡合在连接卡套中,使得高清相机在转动调节的过程中不易颠簸、晃动,气囊具有良好的缓冲减震作用,且气囊上设置有前后贯穿的导流孔,无人机本体飞行时,作用于高清相机外部的风力会通过导流孔的导向沿着高清相机的外部流出,减少对高清相机形成的阻力,风力经过导流孔导向减少对高清相机进行冲击,使得高清相机拍摄的画面清晰,增加测绘的精确度;
38.5、本发明的一种基于无人机的测绘装置,为了增加调节高清相机倾斜度时的顺滑性,在高清相机的外圈处设置有环形卡槽,当高清相机倾斜时,若是高清相机受底部重力过高会一定距离的向下移动,而橡胶卡条卡合在环形卡槽外圈处进行限位,限位卡套在高清
相机的端部进行限位,保证了高清相机受力过度时可自动调节距离,不会对高清相机造成硬性损伤等现象,且高清相机不易脱落;
39.6、本发明的一种基于无人机的测绘装置,通过充气单元对充气腔中充气时,可使得气囊膨胀变形,从而对高清相机外部形成包覆固定的结构,在高清相机松弛时,可通过充气单元向充气腔中充气加压,且弹性固定的方式减低了对高清相机的损伤。
附图说明
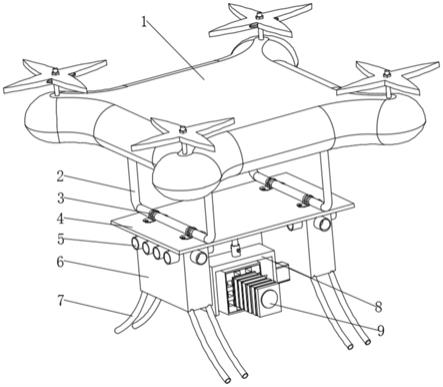
40.图1为本发明结构示意图。
41.图2为本发明底部结构示意图。
42.图3为本发明排气管结构示意图。
43.图4为本发明气箱结构示意图。
44.图5为本发明高清相机结构示意图。
45.图6为本发明连接架结构示意图。
46.图7为本发明图2中a处结构放大示意图。
47.图8为本发明气箱内部结构示意图。
48.图9为本发明连接架内部结构示意图。
49.图10为本发明连接卡套结构示意图。
50.图中:1、无人机本体;2、无人机支撑腿;3、卡套;4、连接板;5、排气管;6、气箱;7、进气管;8、连接架;9、高清相机;10、第一驱动单元;11、第一驱动轴;12、环形卡槽;13、橡胶卡条;14、连接卡套;15、导流孔;16、气囊;17、第二驱动轴;18、驱动单元支撑板;19、第二驱动单元;20、进气腔室;21、第一控制单元;22、进气槽;23、扇叶轴;24、扇叶;25、传动单元;26、中间支撑板;27、出气腔室;28、第二控制单元;29、限位卡套;30、安装套环;31、充气腔;32、充气单元;33、连通气道;34、飞行桨;35、飞行桨轴;36、飞行桨动力箱;37、弧形面。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.本发明提供了如图1-10所示的一种基于无人机的测绘装置,包括无人机本体1,无人机本体1的底部两侧均设置有无人机支撑腿2,无人机支撑腿2的下方设置有连接板4,无人机支撑腿2上套设有卡套3,卡套3的底部通过螺钉固定在连接板4上,连接板4的下方设置有维稳机构,维稳机构设置有两组,两组维稳机构对称分布,维稳机构包括固定焊接在连接板4底部的气箱6,气箱6呈矩形箱体结构,气箱6的上端外圈处设置有排气管5,气箱6的下端四角处均设置有进气管7,排气管5和进气管7连通,气箱6的内部设置有驱动机构。
53.驱动机构包括传动单元25、扇叶轴23、扇叶24,扇叶轴23传动连接在传动单元25的上端,扇叶24固定焊接在扇叶轴23的外圈处,维稳机构包括固定焊接在气箱6内部的中间支撑板26,传动单元25固定安装在中间支撑板26的底部,扇叶轴23设置于中间支撑板26的上方,扇叶轴23活动穿过中间支撑板26设置,中间支撑板26将气箱6内部隔成上下分布的出气
腔室27、进气腔室20,中间支撑板26上设置有多组上下贯穿的进气槽22,排气管5连通出气腔室27,进气管7连通进气腔室20。
54.本实施例中,为了解决测绘用的无人机在飞行时其稳定性较差,受高空的气流影响机身会高频率的晃动,导致测绘出现偏差、模糊,测绘不精确的现象,在连接板4的下方设置有维稳机构,维稳机构设置有两组,两组维稳机构对称分布,维稳机构包括固定焊接在连接板4底部的气箱6,气箱6呈矩形箱体结构,气箱6的上端外圈处设置有排气管5,气箱6的下端四角处均设置有进气管7,排气管5和进气管7连通,气箱6的内部设置有驱动机构;
55.驱动机构包括传动单元25、扇叶轴23、扇叶24,扇叶轴23传动连接在传动单元25的上端,扇叶24固定焊接在扇叶轴23的外圈处,维稳机构包括固定焊接在气箱6内部的中间支撑板26,传动单元25固定安装在中间支撑板26的底部,扇叶轴23设置于中间支撑板26的上方,扇叶轴23活动穿过中间支撑板26设置,中间支撑板26将气箱6内部隔成上下分布的出气腔室27、进气腔室20,中间支撑板26上设置有多组上下贯穿的进气槽22,排气管5连通出气腔室27,进气管7连通进气腔室20;
56.当传动单元25启动时可通过扇叶轴23带动扇叶24转动,从而带动无人机本体1周围的气流从进气管7处进入,然后从排气管5处排出,从而从无人机本体1侧面推动无人机本体1趋于稳定,具体的,可通过控制器控制对应的第二控制单元28和第一控制单元21打开,从而利用从无人机本体1底部吸入的气流从气箱6不同侧面推出时的反推力带动无人机本体1平稳,避免了无人机本体1产生歪斜的现象,保证了无人机本体1稳定飞行,受高空快速气流影响较小;
57.且风力被带入气箱6中时可增加无人机本体1上升及平飞时的动力,充分利用能源,风力从进气管7进入进气腔室20后经过进气槽22进入出气腔室27,进入出气腔室27中的风力从对应的排气管5处排出,第二控制单元28和第一控制单元21均可使用电磁阀等装置,传动单元25可使用电机等装置。
58.排气管5设置有多组,多组排气管5呈等距离分布在气箱6一圈处,排气管5中设置有第二控制单元28,进气管7中设置有第一控制单元21,进气管7呈弧形的管道结构。
59.需要说明的是,排气管5设置有多组,多组排气管5呈等距离分布在气箱6一圈处,当无人机本体1飞行时向右侧歪斜时,可启动此时位于气箱6右侧排气管5中的第二控制单元28和位于气箱6左侧的进气管7中的第一控制单元21,左侧的进气管7将无人机本体1左侧底部的高气流抽入排气管5中排出,从而降低无人机本体1左侧底部受高压气流的影响,而此时气流从右侧的排气管5排出,增加排气管5右侧气流的压力,从而从底部、侧面同时辅助无人机本体1稳定飞行。
60.无人机支撑腿2呈凹字形结构,无人机支撑腿2的截面呈圆形,卡套3呈半环形结构套设在无人机支撑腿2上,卡套3的两端均固定设置有通过螺钉固定在连接板4表面的固定板。
61.进一步的,无人机支撑腿2的整体面积较小,对无人机本体1飞行时几乎没有阻力,使得无人机本体1飞行时损耗小且可连接连接板4,便于安装使用。
62.无人机本体1的四角处均设置有飞行桨动力箱36,飞行桨动力箱36中存储有电机,飞行桨动力箱36的上方设置有传动连接在电机端部的飞行桨轴35,飞行桨轴35上固定设置有飞行桨34。
63.具体的,无人机本体1四角处飞行桨动力箱36中均设置有电机,方便单独控制每一角位置的飞行桨34转速,从而使得无人机本体1换向方便。
64.无人机本体1的边缘处设置有弧形面37,无人机本体1呈矩形箱体结构,无人机本体1四角处的飞行桨动力箱36突出于无人机本体1四角处,且无人机本体1和飞行桨动力箱36整体形成外部在无人机本体1每一面弧形凹陷的区域。
65.其中,无人机本体1的边缘处设置有弧形面37,无人机本体1和飞行桨动力箱36整体形成外部在无人机本体1每一面弧形凹陷的区域,使得无人机本体1整体外观边角处流线设置,减少风阻,利于无人机本体1高速飞行,节省能源。
66.本发明还公开了一种电子设备,包括如上任一的基于无人机的测绘装置,还包括:
67.高清相机9,高清相机9通过调节机构安装在连接板4底部,高清相机9位于两组维稳机构之间,高清相机9的外部套设有连接卡套14,连接卡套14的一侧固定焊接有第二驱动轴17,第二驱动轴17的端部传动连接有第二驱动单元19,连接卡套14的外部设置有呈倒置的凹字形结构的连接架8,第二驱动单元19通过驱动单元支撑板18固定在连接架8的侧面,第二驱动轴17活动穿过连接架8设置,连接板4的底部固定焊接有驱动连接架8转动的第一驱动单元10,第一驱动单元10的下端通过螺杆固定在安装套环30上,安装套环30固定焊接在连接架8的上表面中部。
68.本实施例中,为了解决测绘用的拍摄相机等机构在转动调节时其稳定性较差,容易偏移时晃动等,机械性较强,缺乏柔顺性,影响测绘使用的现象,在两组维稳机构之间设置有高清相机9,高清相机9的外部套设有连接卡套14,连接卡套14的一侧固定焊接有第二驱动轴17,第二驱动轴17的端部传动连接有第二驱动单元19,连接卡套14的外部设置有呈倒置的凹字形结构的连接架8,第二驱动单元19通过驱动单元支撑板18固定在连接架8的侧面,第二驱动轴17活动穿过连接架8设置,连接板4的底部固定焊接有驱动连接架8转动的第一驱动单元10,第一驱动单元10的下端通过螺杆固定在安装套环30上,安装套环30固定焊接在连接架8的上表面中部;
69.具体的,高清相机9的外部通过可弹性变形的气囊16卡合在连接卡套14中,使得高清相机9在转动调节的过程中不易颠簸、晃动,气囊16具有良好的缓冲减震作用,且气囊16上设置有前后贯穿的导流孔15,无人机本体1飞行时,作用于高清相机9外部的风力会通过导流孔15的导向沿着高清相机9的外部流出,减少对高清相机9形成的阻力,风力经过导流孔15导向减少对高清相机9进行冲击,使得高清相机9拍摄的画面清晰,增加测绘的精确度;
70.且装置中,第一驱动单元10可通过第一驱动轴11带动连接架8、高清相机9转动,调节高清相机9的朝向,第二驱动单元19可通过第二驱动轴17带动高清相机9转动,调节高清相机9的倾斜度,第一驱动单元10和第二驱动单元19均可使用电机等装置。
71.连接卡套14的内部固定设置有气囊16,气囊16上设置有导流孔15,导流孔15贯穿气囊16的前后,导流孔15等距离设置有多组,气囊16的内部设置有充气腔31,充气腔31设置有多组,多组充气腔31设置于相邻的导流孔15之间,气囊16的内部层结构中设置有连通在多组充气腔31之间的连通气道33,连接卡套14的一侧固定焊接有连通充气腔31中的充气单元32。
72.需要说明的是,为了增加调节高清相机9倾斜度时的顺滑性,在高清相机9的外圈处设置有环形卡槽12,当高清相机9倾斜时,若是高清相机9受底部重力过高会一定距离的
向下移动,而橡胶卡条13卡合在环形卡槽12外圈处进行限位,限位卡套29在高清相机9的端部进行限位,保证了高清相机9受力过度时可自动调节距离,不会对高清相机9造成硬性损伤等现象,且高清相机9不易脱落。
73.高清相机9呈矩形状,高清相机9的外圈处设置有环形卡槽12,环形卡槽12沿着高清相机9的径向截面分布,环形卡槽12等距离设置有多组。
74.进一步的,充气单元32可使用气泵等装置,通过充气单元32对充气腔31中充气时,可使得气囊16膨胀变形,从而对高清相机9外部形成包覆固定的结构,在高清相机9松弛时,可通过充气单元32向充气腔31中充气加压,且弹性固定的方式减低了对高清相机9的损伤。
75.气囊16的两端均固定设置有对应卡合在环形卡槽12中的橡胶卡条13,高清相机9的前后两端均固定设置有限位卡套29,限位卡套29向高清相机9的外圈凸出。
76.其中,无人机本体1上的气箱6和高清相机9结合,可增加测绘时的精确性。
77.工作原理:为了解决测绘用的无人机在飞行时其稳定性较差,受高空的气流影响机身会高频率的晃动,导致测绘出现偏差、模糊,测绘不精确的现象,在连接板4的下方设置有维稳机构,维稳机构设置有两组,两组维稳机构对称分布,维稳机构包括固定焊接在连接板4底部的气箱6,气箱6呈矩形箱体结构,气箱6的上端外圈处设置有排气管5,气箱6的下端四角处均设置有进气管7,排气管5和进气管7连通,气箱6的内部设置有驱动机构;
78.驱动机构包括传动单元25、扇叶轴23、扇叶24,扇叶轴23传动连接在传动单元25的上端,扇叶24固定焊接在扇叶轴23的外圈处,维稳机构包括固定焊接在气箱6内部的中间支撑板26,传动单元25固定安装在中间支撑板26的底部,扇叶轴23设置于中间支撑板26的上方,扇叶轴23活动穿过中间支撑板26设置,中间支撑板26将气箱6内部隔成上下分布的出气腔室27、进气腔室20,中间支撑板26上设置有多组上下贯穿的进气槽22,排气管5连通出气腔室27,进气管7连通进气腔室20;
79.当传动单元25启动时可通过扇叶轴23带动扇叶24转动,从而带动无人机本体1周围的气流从进气管7处进入,然后从排气管5处排出,从而从无人机本体1侧面推动无人机本体1趋于稳定,具体的,可通过控制器控制对应的第二控制单元28和第一控制单元21打开,从而利用从无人机本体1底部吸入的气流从气箱6不同侧面推出时的反推力带动无人机本体1平稳,避免了无人机本体1产生歪斜的现象,保证了无人机本体1稳定飞行,受高空快速气流影响较小;
80.且风力被带入气箱6中时可增加无人机本体1上升及平飞时的动力,充分利用能源,风力从进气管7进入进气腔室20后经过进气槽22进入出气腔室27,进入出气腔室27中的风力从对应的排气管5处排出,第二控制单元28和第一控制单元21均可使用电磁阀等装置,传动单元25可使用电机等装置;
81.排气管5设置有多组,多组排气管5呈等距离分布在气箱6一圈处,当无人机本体1飞行时向右侧歪斜时,可启动此时位于气箱6右侧排气管5中的第二控制单元28和位于气箱6左侧的进气管7中的第一控制单元21,左侧的进气管7将无人机本体1左侧底部的高气流抽入排气管5中排出,从而降低无人机本体1左侧底部受高压气流的影响,而此时气流从右侧的排气管5排出,增加排气管5右侧气流的压力,从而从底部、侧面同时辅助无人机本体1稳定飞行;
82.高清相机9的外部通过可弹性变形的气囊16卡合在连接卡套14中,使得高清相机9
在转动调节的过程中不易颠簸、晃动,气囊16具有良好的缓冲减震作用,且气囊16上设置有前后贯穿的导流孔15,无人机本体1飞行时,作用于高清相机9外部的风力会通过导流孔15的导向沿着高清相机9的外部流出,减少对高清相机9形成的阻力,风力经过导流孔15导向减少对高清相机9进行冲击,使得高清相机9拍摄的画面清晰,增加测绘的精确度;
83.且装置中,第一驱动单元10可通过第一驱动轴11带动连接架8、高清相机9转动,调节高清相机9的朝向,第二驱动单元19可通过第二驱动轴17带动高清相机9转动,调节高清相机9的倾斜度,第一驱动单元10和第二驱动单元19均可使用电机等装置。