1.本发明涉及无人机技术领域,具体涉及一种无人机全景相机保护方法及结构。
背景技术:
2.无人机在飞行过程中,因操作者的不当操作或外界因素的干扰,容易与如鸟类、电线或墙体等外物发生碰撞,甚至发生坠机,当碰撞或坠机等意外情况发生时,有可能对无人机及其记载镜头的造成损害,尤其对于无人机挂载的全景相机,区别于普通镜头,全景相机包括多个镜头,多个镜头按一定规律排布设置,暴露在外的镜头多,在遇到任意角度的碰撞时,都容易发生损害,且损伤远大于普通相机。
3.中国发明专利cn107697310a公开了一种无人机相机保护装置,能在无人机伞降时着地的瞬间避免镜头脏污及被异物刺破或撞击。但该发明存在一定的缺陷,即无法对无人机相机保护装置进行控制,在单次飞行中只能实现单次的保护,极为不便。
4.中国发明专利cn111024091a公开了一种视觉辅助微型无人机室内飞行三维姿态算法,可以实现无人机室内飞行时俯仰角、横滚角和航向角的纯自主解算。但该方法仅能用于室内场景,无法用于室外,无法应用于瞬间发生的碰撞或坠机情形。
技术实现要素:
5.1、发明要解决的技术问题
6.针对无人机全景相机在发生碰撞或坠机后易损坏的技术问题,本发明提供了一种无人机全景相机保护方法及结构,其中,方法部分可控制无人机可在碰撞发生瞬间判定飞行状态,进而控制无人机保护全景相机不受损伤,结构部分可使无人机利用自身机构收回全景相机的镜头,将镜头置于坚硬的保护壳体内,实现对全景相机镜头的保护。
7.2、技术方案
8.为解决上述问题,本发明提供的技术方案为:
9.一种无人机全景相机保护方法,若检测传感模块检测到无人机飞行姿态异常,保护控制器控制第二执行模块对全景相机解除固定;第二执行模块对全景相机解除固定成功后,弹性件102带动全景相机向至保护壳体100内回收;其中,所述无人机飞行姿态异常的判断包括:保护控制器接收检测传感模块检测到的无人机飞行姿态数据,与设定的无人机飞行姿态正常数据阈值范围相比对,若不在阈值范围内,则无人机飞行姿态异常。
10.可选地,所述保护控制器控制第二执行模块对全景相机解除固定,进一步为:保护控制器控制第二执行模块的电磁铁108失电,释放位于保护壳体100开口处的摆动件107,以使摆动件107解除对全景相机的固定。
11.可选地,所述检测传感模块包括速度传感器、加速度传感器、陀螺仪和全景相机,加速度传感器、陀螺仪和全景相机采集数据均发送至保护控制器,保护控制器根据采集数据计算无人机飞行姿态数据,将机飞行姿态数据与设定的无人机飞行姿态正常数据阈值范围相比对,若无人机飞行姿态数据不在阈值范围内,则无人机飞行姿态异常。
12.可选地,若保护控制器判断出陀螺仪检测到无人机的水平、垂直、俯仰、航向和角速度不在预设的正常数据阈值范围内,且保护控制器根据全景相机采集的若干帧图像计算得出的无人机飞行速度不在正常飞行速度阈值范围内,则无人机飞行姿态异常。
13.可选地,保护控制器根据全景相机采集到的图像数据判断是否出现的障碍物,且保护控制器根据加速度传感器检测到的加速度值大于无人机正常飞行加速度阈值时,则无人机飞行姿态异常。
14.可选地,还包括:若检测传感模块检测到无人机飞行姿态恢复正常,则保护控制器控制第一执行模块101输出轴驱动全景相机伸出保护壳体100,弹性件102同步拉伸;当全景相机被推出保护壳体100后,保护控制器控制第二执行模块固定全景相机。
15.一种无人机全景相机保护结构,执行上述的一种无人机全景相机保护方法,包括保护壳体100,所述保护壳体100上设置有第一执行模块101,所述保护壳体100内设置有弹性件102,所述弹性件102一端与所述安装板105固定,所述第一执行模块101输出轴用于与安装板105相抵,所述保护壳体100开口处设置有第二执行模块;还包括保护控制器,保护控制器与第一执行模块101和第二执行模块连接。
16.可选地,所述第一执行模块101包括设置于保护壳体100上的电缸,所述电缸输出轴用于与所述安装板105相抵。
17.可选地,所述第二执行模块为铰接设置于保护壳体100开口处的摆动件107,所述保护壳体100开口处设置有电磁铁108,所述电磁铁108用于吸附摆动件107,所述摆动件107铰接处设置有复位件。
18.可选地,所述安装板105上设置有功能透镜103。
19.3、有益效果
20.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
21.本发明提出的一种无人机全景相机保护方法及结构,其中,方法部分可控制无人机可在碰撞发生瞬间判定飞行状态,进而控制无人机保护全景相机不受损伤,结构部分可使无人机利用自身机构收回全景相机的镜头,将镜头置于坚硬的保护壳体内,实现对全景相机镜头的保护。
附图说明
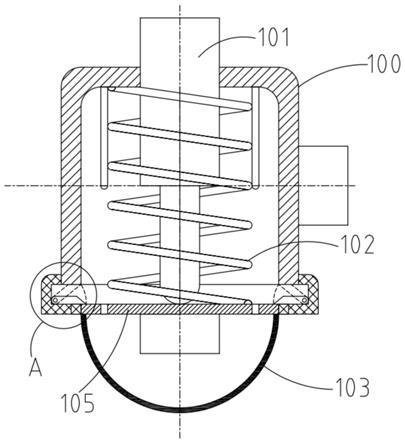
22.图1为本发明实施例提出的一种无人机全景相机保护结构的结构示意图。
23.图2为图1中a处的放大结构示意图。
具体实施方式
24.为进一步了解本发明的内容,结合附图及实施例对本发明作详细描述。
25.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。本发明中所述的第一、第二等词语,是为了描述本发明的技术方案方便而设置,并没有特定的限定作用,均为泛指,对本发明的技术方案不构成限定作用。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。同一实施例中的多个技术方案,以及不同实施例的多个技术方案之间,可进行排列组合形成新的不存在矛盾或冲突的技术方案,均在本发明要求保护的范围内。
26.实施例1
27.结合附图1-2,本实施例提出了一种无人机全景相机保护方法,若检测传感模块检测到无人机飞行姿态异常,保护控制器控制第二执行模块对全景相机解除固定;第二执行模块对全景相机解除固定成功后,弹性件102带动全景相机向至保护壳体100内回收;其中,所述无人机飞行姿态异常的判断包括:保护控制器接收检测传感模块检测到的无人机飞行姿态数据,与设定的无人机飞行姿态正常数据阈值范围相比对,若不在阈值范围内,则无人机飞行姿态异常。
28.本实施例的一种全景相机保护装置,能够在无人机发生碰撞或坠机时,将暴露在外的全景相机收回保护壳体100内部,以实现对全景相机各角度的保护。
29.当无人机发生碰撞或坠机等极端情况时,保护控制器接收检测传感模块检测到的无人机飞行姿态数据,与设定的无人机飞行姿态正常数据阈值范围相比对,若不在阈值范围内,则无人机飞行姿态异常,此时保护控制器通过控制第二执行模块解除对全景相机的固定,全景相机受第一执行模块101的弹性件102的拉力收回保护壳体100内。
30.弹性件102一端和保护壳体100内部连接,弹性件102的另一端与无人机连接,弹性件102复位回收,带动全景相机回收至保护壳体100内。
31.本实施例中,第二执行模块可以为受电机或电缸驱动的伸缩杆、夹持件、卡扣,或为电磁铁等具有吸附作用的功能结构,用于固定伸出保护壳体100的全景相机。
32.检测传感模块包括一类或多类传感器,各类传感器数量为一个或多个。
33.同样的,保护控制器将任意传感器的检测数据,与其他传感器检测数据组合和对比,可以进行单维度或多维度飞行姿态异常检测,当多个传感器检测数据,与保护控制器阈值不匹配时,实现单维度飞行姿态异常检测;当各类传感器的检测数据,均与保护控制器阈值不匹配时,实现多维度飞行姿态检测;并可根据不同传感器采集的信息,判断或推测当前飞行姿态异常的具体情况,如机身倾斜程度、下落速度等,以精准判断无人机是否为异常飞行状态。
34.作为本实施例可选的实施方式,所述保护控制器控制第二执行模块对全景相机解除固定,进一步为:保护控制器控制第二执行模块的电磁铁108失电,释放位于保护壳体100开口处的摆动件107,以使摆动件107解除对全景相机的固定。
35.作为本实施例可选的实施方式,所述检测传感模块包括速度传感器、加速度传感器、陀螺仪和全景相机,加速度传感器、陀螺仪和全景相机采集数据均发送至保护控制器,
保护控制器根据采集数据计算无人机飞行姿态数据,将机飞行姿态数据与设定的无人机飞行姿态正常数据阈值范围相比对,若无人机飞行姿态数据不在阈值范围内,则无人机飞行姿态异常。
36.作为本实施例可选的实施方式,若保护控制器判断出陀螺仪检测到无人机的水平、垂直、俯仰、航向和角速度不在预设的正常数据阈值范围内,且保护控制器根据全景相机采集的若干帧图像计算得出的无人机飞行速度不在正常飞行速度阈值范围内,则无人机飞行姿态异常。
37.本实施例采用传感陀螺仪和全景相机,其中,传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器;并将检测数据传送至保护控制器,控制器同时根据全景相机采集的若干帧图像计算,综合判定无人机飞行姿态是否处于异常,以避免坠落的误判。
38.本实施例中,基于无人机坠落时的不稳定状态,如翻滚、倾倒、晃动等姿态,通过陀螺仪,分别检测其水平、垂直、俯仰、航向和角速度等参量,根据多项参量相互对比,综合判定陀螺仪检测反馈的有效性,若多项参量均不在预设的正常数据阈值范围内,则表明此时根据陀螺仪数据做出的判定为无人机飞行姿态异常。
39.在陀螺仪判断飞行姿态的同时,保护控制器会对全景相机采集的若干帧图像进行同步分析,例如在某一镜头中选择关键帧,在关键帧中识别一个或多个关键特征,随后在后续图像帧中比对该关键特征的变化情况,当该关键特征发生异常突变,如突然消失或混乱变化,即表明无人机飞行速度不在正常飞行速度阈值范围内;此外,结合无人机自身导航定位位置信息,通过连续若干帧图像中识别出来的关键特征大小渐变量,结合采集相应若干帧图像时间间隔,两者相除计算无人机飞行速度,若该速度不在上一时间段的无人机正常飞行速度误差范围内,则表明此时根据图像计算得出无人机飞行姿态异常。
40.当陀螺仪做出的判定为无人机飞行姿态异常,且根据全景相机采集的若干帧图像计算同样得出飞行姿态异常时,才最终判定无人机此时飞行姿态异常,由此避免无人机坠落场景的误判。
41.作为本实施例可选的实施方式,保护控制器根据全景相机采集到的图像数据判断是否出现的障碍物,且保护控制器根据加速度传感器检测到的加速度值大于无人机正常飞行加速度阈值时,则无人机飞行姿态异常。
42.本实施例利用全景相机和加速度传感器综合判断无人机飞行姿态是否异常,以避免碰撞的误判。
43.本实施例中,基于无人机发生碰撞瞬间,会经历靠近障碍物,发生碰撞,飞行速度突变的过程。因此,本实施例保护控制器根据全景相机采集到的图像数据判断是否出现的障碍物,例如在某一镜头中选择关键帧,在关键帧中识别一个或多个关键特征,随后在后续图像帧中比对该关键特征是否被突然遮挡,或是否存在不断变大的关键特征,由此判定障碍物是否出现或正在接近。
44.在保护控制器对全景相机采集到的图像数据进行计算的同时,保护控制器根据加速度传感器检测到的加速度值进行飞行姿态的判断,当加速度值大于无人机正常飞行加速度阈值时,则加速度传感器数据的判定结果为无人机飞行姿态异常。
45.当根据加速度传感器采集数据做出的判定为无人机飞行姿态异常,且根据全景相
机采集的若干帧图像计算同样得出飞行姿态异常时,才最终判定无人机此时飞行姿态异常,由此避免无人机突发碰撞的误判。
46.作为本实施例可选的实施方式,还包括:若检测传感模块检测到无人机飞行姿态恢复正常,则保护控制器控制第一执行模块101输出轴驱动全景相机伸出保护壳体100,弹性件102同步拉伸;当全景相机被推出保护壳体100后,保护控制器控制第二执行模块固定全景相机。
47.本实施例中,全景相机在使用前为收回状态,位于保护壳体100内,当检测传感模块检测到无人机飞行姿态恢复正常时,即无人机检测到自身处于稳定飞行状态时,保护控制器可以控制如电缸、导杆等的第一执行模块101,利用第一执行模块101的输出轴,将全景相机自保护壳体100内部推出;此时与全景相机相连的弹性件102,随第一执行模块101输出轴伸出而被拉长,作为优选,弹性件102可为弹簧,使全景相机始终受到弹簧的拉力,当全景相机被全部推出后,保护控制器控制第二执行模块,固定被推出保护壳体100的全景相机。当全景相机被固定完成后,第一执行模块101的输出轴可以选择收回,即恢复初始位置,或保持推出状态并断电,以取得全景相机更好的固定效果。
48.实施例2
49.本实施例提出了一种无人机全景相机保护结构,执行上述实施例1的一种无人机全景相机保护方法,包括保护壳体100,所述保护壳体100上设置有第一执行模块101,所述保护壳体100内设置有弹性件102,所述弹性件102一端与所述安装板105固定,所述第一执行模块101输出轴用于与安装板105相抵,所述保护壳体100开口处设置有第二执行模块;还包括保护控制器,保护控制器与第一执行模块101和第二执行模块连接。
50.本实施例的一种全景相机保护装置,能够在无人机发生碰撞或坠机时,将暴露在外的全景相机收回保护壳体100内部,以实现对全景相机各角度的保护。
51.本实施例中,全景相机在使用前为收回状态,位于保护壳体100内,当需要使用时,安装板105用于安装全景相机,安装板105和第二执行模块配合用于固定伸出保护壳体100后的全景相机,操作者通过遥控器等控制设备向无人机发送信号,或无人机保护控制器接收到信号,检测到自身处于稳定飞行状态时,保护控制器可以控制如电缸、导杆等的第一执行模块101,利用第一执行模块101的输出轴,推动安装板105,将全景相机自保护壳体100内部推出,此时与全景相机相连的弹性件102被拉长,全景相机始终受到弹性件102的拉力,当全景相机被全部推出后,保护控制器控制第二执行模块,固定被推出保护壳体100的全景相机,当全景相机被固定完成后,第一执行模块101的输出轴可以选择收回,即恢复初始位置,或保持推出状态并断电,以配合第二执行模块进一步固定全景相机,取得全景相机更好的固定效果。
52.本实施例中,第二执行模块可以为受电机或电缸驱动的导杆、夹持件、卡扣,或为电磁铁等具有吸附作用的功能结构。
53.当无人机发生碰撞或坠机等极端情况时,保护控制器接收检测传感模块检测到的无人机飞行姿态数据,与设定的无人机飞行姿态正常数据阈值范围相比对,若不在阈值范围内,则无人机飞行姿态异常,此时保护控制器通过控制第二执行模块,解除对全景相机的固定,全景相机受第一执行模块101的弹性件102的拉力收回保护壳体100内。
54.或保护控制器控制第一执行模块101的输出轴带动全景相机向保护壳体100内部
回收,弹性件102一端和保护壳体100内部连接,弹性件102的另一端与全景相机连接,弹性件102复位回收,带动全景相机回收至保护壳体100内。
55.检测传感模块包括一类或多类传感器,各类传感器数量为一个或多个,保护控制器将任意传感器的检测数据,与其他传感器检测数据组合和对比,以判断传感器检测的结果是否与其他传感器检测到的飞行状态相一致,若不一致则,进行检测数据的修正;
56.同样的,保护控制器将任意传感器的检测数据,与其他传感器检测数据组合和对比,可以进行单维度或多维度飞行姿态异常检测,当多个传感器检测数据,与保护控制器阈值不匹配时,实现单维度飞行姿态异常检测;当各类传感器的检测数据,均与保护控制器阈值不匹配时,实现多维度飞行姿态检测;并可根据不同传感器采集的信息,判断或推测当前飞行姿态异常的具体情况,如机身倾斜程度、下落速度等。
57.作为本实施例可选的实施方式,所述第一执行模块101包括设置于保护壳体100上的电缸,所述电缸输出轴用于与所述安装板105相抵。本实施例的第一执行模块101采用电缸,电缸的输出轴与全景相机并不相互固定。当全景相机被完全推出后,一种可想到的实施方式为,电缸输出轴收缩,恢复初始状态;另一种可想到的实施方式为,电缸的输出轴保持伸出状态,以配合第二执行模块进一步固定全景相机取得全景相机更好的固定效果。
58.作为本实施例可选的实施方式,所述第二执行模块为铰接设置于保护壳体100开口处的摆动件107,所述保护壳体100开口处设置有电磁铁108,所述电磁铁108用于吸附摆动件107,所述摆动件107铰接处设置有复位件。本实施例中,摆动件107可以摆动并利用复位件进行复位,优选的,复位件可以为卷簧或板弹簧,以使摆动件107在初始状态时保持非水平状态,复位件也可为电磁铁,当电磁铁得电时,将摆动件107吸附于初始位置,保持非水平状态。
59.当摆动件107摆动至水平时,可以卡住全景相机,从而避免全景相机受弹性件102拉力被收回,为保证摆动件107可以维持水平状态,本实施例在保护壳体100开口处设置有电磁铁108,当电磁铁108得电时,即可吸附住摆动件107,从而实现全景相机伸出保护壳体100后的固定。
60.当发生碰撞或异常情况时,电磁铁108失电,摆动件107失去吸附力,摆动件107收到复位件的作用力复位,全景相机即可以顺利收回。
61.可想到的是,若复位件采用电磁铁时,电磁铁108与复位件的得电情况必然相反,由此才可保证摆动件107顺利摆动。
62.作为本实施例可选的实施方式,所述安装板105上设置有功能透镜103。本实施例中,安装板105上还设置有功能透镜103,功能透镜103可以为具有偏光、滤色等功能的透镜,以通过功能透镜103的光学功能实现更好的拍摄效果。功能透镜103还可起到全景相机的保护作用,且可根据需要选择材质,比如轻质耐用的功能性材料等。
63.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。