1.本实用新型属于无人机领域,尤其涉及一种全景无人机及fpv眼镜。
背景技术:
2.现有技术中,无人机和全景相机无法做到有机结合,当所需拍摄画面方向与飞行方向不一致时,现有的解决方案一种是利用云台电机旋转镜头到指定位置,结构复杂,成本高,且反应不灵敏;另一种在无人机上搭载全景相机,但全景相机拍摄的画面只能录像事后观看,无法做到全景画面实时传输,影响取景和拍摄的质量和效率。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供了一种全景无人机,其可以脱离云台进行全景拍摄,且可以实时传送拍摄影像,便于取景抓拍,拍摄体验佳。
4.本实用新型的技术方案是:一种全景无人机,包括无人机本体,所述全景无人机还包括用于采集所述全景无人机周围全景影像的全景镜头,所述全景镜头设置有两组且分别设置于所述无人机本体的顶部和底部;所述全景无人机还包括设置于所述无人机本体的控制模块、通讯连接于所述控制模块的图传系统、分别与所述控制模块和所述图传系统电连接的供电模块;所述图传系统用于将所述控制模块处理后的图像信号发送至设定的终端。
5.作为本技术方案的进一步改进,所述全景无人机包括设置于所述无人机本体的两侧且在飞行时位于两组所述全景镜头之间的天线支架机构;所述天线支架机构与所述控制模块相连接;所述天线支架机构具有于所述全景无人机飞行时可转动至横向或指向天空且于所述全景无人机起飞或降落时向下转动至低于最下方的所述全景镜头的天线支架部件。
6.作为本技术方案的进一步改进,所述天线支架机构包括电连接于所述控制模块并用于驱动所述天线支架部件转动的舵机;所述舵机连接于所述无人机本体的侧面;所述天线支架部件转动连接于所述舵机。
7.作为本技术方案的进一步改进,所述无人机本体包括上支架和连接于所述上支架的下支架,所述无人机本体还包括连接于所述下支架的四个机臂、连接于所述机臂的桨叶组件。
8.作为本技术方案的进一步改进,所述上支架和下支架之间通过两端具有螺纹孔的柱体连接,上支架和下支架具有多个镂空孔;所述上支架和所述下支架相向的一侧为支架内侧,所述供电模块设置于所述支架内侧;两组所述全景镜头包括设置于所述上支架顶部的第一组全景镜头和设置于所述下支架底部的第二组全景镜头;所述控制模块设置于所述上支架并与所述第一组全景镜头相邻。
9.作为本技术方案的进一步改进,所述全景无人机还包括设置于所述全景镜头的第一imu防抖模块。
10.作为本技术方案的进一步改进,所述无人机本体、所述第一imu防抖模块、所述控制模块和所述天线支架机构均位于两组所述全景镜头于纵向方向的最高点和最低点之间。
11.本实用新型还提供了一种fpv眼镜,包括fpv眼镜本体,所述fpv眼镜本体具有用于与所述的全景无人机拍摄中所述图传系统无线连接并实时接收全景影像的连接模块。
12.作为本技术方案的进一步改进,所述fpv眼镜本体设置有第二imu防抖模块。
13.作为本技术方案的进一步改进,所述fpv眼镜本体设置有第二控制模块,所述第二控制模块无线连接于所述控制模块并用于控制所述全景无人机的飞行姿态。
14.本实用新型所提供的一种全景无人相机,通过设置两组分别位于所述无人机本体顶部和底部的全景镜头,可以脱离云台进行全景拍摄,且能够通过图传系统实时传送拍摄的影像;所述全景镜头具有于纵向方向的最高点和最低点,保证所述全景镜头不被遮挡地对周围进行全景拍摄;通过设置的天线支架部件,于所述全景无人机飞行时可转动至横向充当天线利于信号传输,避免飞行中遮挡到所述全景镜头而影响全景拍摄;且于所述全景无人机起飞或降落时,天线支架部件可转动至纵向并充当落地支架提供缓冲以保护全景镜头。本实用新型还提供了一种用于实时接收全景影像的fpv眼镜,用户通过佩戴所述fpv眼镜就能接收实时拍摄的影像,便于抓拍,提高拍摄效率,拍摄体验佳。
附图说明
15.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
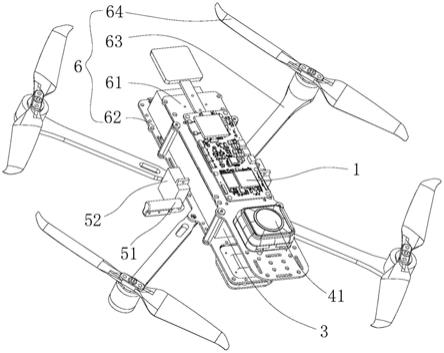
16.图1是本实用新型实施例提供的一种全景无人机的第一视角的立体装配图;
17.图2是本实用新型实施例提供的一种全景无人机的第二视角的立体装配图;
18.图3是本实用新型实施例提供的一种全景无人机的第三视角的立体装配图。
19.图中标号:
20.1-控制模块;2-图传系统;3-供电模块;
21.41-第一组全景镜头,42-第二组全景镜头;
22.5-天线支架机构,51-天线支架部件,52-舵机;
23.6-无人机本体,61-上支架,62-下支架,63-机臂,64-桨叶组件。
具体实施方式
24.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.需要说明的是,术语“设置”、“连接”应做广义理解,例如,可以是直接设置、连接,也可以通过居中元部件、居中结构间接设置、连接。
26.另外,本实用新型实施例中若有“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系的用语,其为基于附图所示的方位或位置关系或常规放置状态或使用状态,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的结构、特征、装置或元件必须具有特定的方位或位置关系、也不是必须以特定的方位构造和操作,因此不能理解为对本实
用新型的限制。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
27.在具体实施方式中所描述的各个具体技术特征和各实施例,在不矛盾的情况下,可以通过任何合适的方式进行组合,例如通过不同的具体技术特征/实施例的组合可以形成不同的实施方式,为了避免不必要的重复,本实用新型中各个具体技术特征/实施例的各种可能的组合方式不再另行说明。
28.如图1至图3所示,本实用新型实施例提供的一种全景无人机,包括无人机本体6,所述全景无人机还包括用于采集所述全景无人机周围全景影像的全景镜头,所述全景镜头设置有两组且分别设置于所述无人机本体6的顶部和底部;所述全景无人机还包括设置于所述无人机本体6的控制模块1、通讯连接于所述控制模块1的图传系统2、分别与所述控制模块1和所述图传系统2电连接的供电模块3;所述图传系统2用于将所述控制模块1处理后的图像信号发送至设定的终端。本实用新型实施例所提供的一种全景无人相机,所述全景镜头为鱼眼镜头,通过设置两组分别位于所述无人机本体6顶部和底部的全景镜头,每组至少一个全景镜头(本实施例中每组设置一个),对周围影像进行360
°
无死角拍摄,可以脱离云台进行全景拍摄,且通过图传系统2能够实时传送拍摄的影像,操作简单,实现无人机和全景相机的有机结合,当所需拍摄画面方向与飞行方向不一致时可通过实时传输的全景画面进行判断并实时调整,便于实时取景、抓拍,拍摄的影像质量好、提高拍摄效率。
29.进一步地,所述全景无人机包括设置于所述无人机本体6的两侧并与所述控制模块1相连接的天线支架机构5;所述天线支架机构5具有天线支架部件51,于所述全景无人机飞行时,所述天线支架部件51可转动至横向或指向天空;且于所述全景无人机起飞或降落时,所述天线支架部件51可向下转动至低于所述全景镜头。所述天线支架机构5包括电连接于所述控制模块1并用于驱动所述天线支架部件51转动的舵机52;所述舵机52连接于所述无人机本体6的侧面;所述天线支架部件51转动连接于所述舵机52。本实用新型所提供的一种实施例中,所述天线支架机构5设置有两个,本实施例中为对称设置于所述无人机本体6的两侧;具体应用中,所述天线支架部件51包括天线支架和固定连接于天线支架的天线转轴件,天线转轴件转动连接于所述舵机52的前端(在其他的实施例中也可以是舵机52其他的外表面),所述天线支架具有供天线转轴件插入的插槽;于全景无人机飞行时,位于无人机本体6两侧的两个舵机52收到所述控制模块1的信号,驱动两个所述天线支架部件51同步转动至横向(本实施例中顺时针旋转90
°
),在另外一个实施例中,也可以旋转至指向天空(可以是垂直指向天空,也可以是倾斜指向天空),以使天线支架向外伸展利于信号传输;且于所述全景无人机起飞或降落时,所述天线支架部件51转动至低于所述全景镜头,两个所述天线支架部件51同步至纵向(逆时针旋转90
°
),此时天线支架充当落地脚架提供缓冲,避免所述全景镜头的最低点直接接触地面以保护全景镜头。
30.进一步地,所述无人机本体6包括上支架61和连接于所述上支架61的下支架62,所述无人机本体6还包括连接于所述下支架62的四个机臂63、连接于所述机臂63的桨叶组件64。本实施例中,所述桨叶组件64包括两片中心对称的桨叶,设置于机臂63的上端部。具体应用中,所述桨叶组件64也对应设置有四个,对称分设于所述下支架62的两侧,飞行稳定性高。
31.进一步地,所述上支架61和下支架62之间通过两端具有螺纹孔的柱体连接,本实施例中,柱体对称设置有四个,四个柱体支撑于上支架61和下支架62之间,结构简单,连接
牢靠且机身轻便;上支架61和下支架62具有多个镂空孔,可以进一步减轻所述全景无人机整体的重量,减少飞行能耗,更适于长时间飞行;所述上支架61和所述下支架62相向的一侧为支架内侧,所述供电模块3设置于所述支架内侧,即供电模块3位于上支架61和下支架62之间;两组所述全景镜头包括设置于所述上支架61顶部的第一组全景镜头41和设置于所述下支架62底部的第二组全景镜头42,第一组全景镜头41可以与第二组全景镜头42同轴设置;所述控制模块1设置于所述上支架61并与所述第一组全景镜头41相邻。作为一种可选的实施例,所述第一组全景镜头41设置于所述上支架61的顶部前端处,第二组全景镜头42对称设置于所述下支架62底部的前端处,所述上支架61的顶部中后端用于设置所述控制模块1,提高上支架61顶部的空间利用率,上支架61与下支架62之间具有容纳空间,优化布局,整体结构紧凑,以进一步减小所述全景无人机的重量和尺寸,便于携带。
32.进一步地,所述全景无人机还包括设置于所述全景镜头的第一imu(inertial measurement unit)防抖模块。通过设置在所述全景镜头上设置imu防抖模块,用于对所述全景无人机的飞行姿态进行检测,并通过对飞行姿态数据处理和分析,提高无人机本体6飞行时的平稳性,便于用户精确控制所述全景无人机的飞行,减少因无人机的抖动而影响到影像的拍摄质量。
33.进一步地,所述无人机本体6、所述第一imu防抖模块、所述控制模块1和所述天线支架机构5均位于两组所述全景镜头于纵向方向的最高点和最低点之间。具体应用中,舵机52(内设有电机)、天线支架部件51、供电模块3(本实施例中为储能电池)、四个桨叶组件64和四个机臂63的最高点位于第一组全景镜头41的最高点和第二组全景镜头42的最低点之间,即所述全景无人机的最高点位于第一组全景镜头41,所述全景无人机的最低点位于第二组全景镜头42;所述上支架61的顶部和所述下支架62的底部分别设置有用于安装全景镜头的安装腔室,便于安装,且为全景镜头提供支撑,以使所述全景镜头具有于纵向方向的最高点和最低点,保证所述全景镜头不被遮挡地对周围进行全景拍摄,排除拍摄死角。
34.本实用新型实施例还提供了一种fpv(first person view)眼镜,包括fpv眼镜本体,所述fpv眼镜本体具有用于与所述的全景无人机拍摄中所述图传系统2无线连接并实时接收全景影像的连接模块。本实用新型所提供的实施例中,用户通过佩戴与所述全景无人机相适配的所述fpv眼镜,所述fpv眼镜接收所述全景无人机实时拍摄的影像,用户可以以第一人称视角观看传回的影像,便于抓拍,提高拍摄效率,拍摄体验佳。
35.进一步地,所述fpv眼镜本体设置有第二imu(inertialmeasurementunit)防抖模块,接收的影像更为清晰,可以动态渲染全景画面,以增加沉浸感。
36.进一步地,所述fpv眼镜本体设置有第二控制模块,所述第二控制模块无线连接于所述控制模块1,所述第二控制模块用于控制所述全景无人机的飞行姿态,以使功能更为多样化,体验更为丰富。
37.本实用新型实施例所提供的一种全景无人相机,通过设置两组分别位于所述无人机本体6顶部和底部的全景镜头,可以脱离云台进行全景拍摄,且能够通过图传系统2实时传送拍摄的影像;所述全景无人机的最高点和最低点均位于全景镜头,保证所述全景镜头不被遮挡地对周围进行全景拍摄,排除拍摄死角;通过设置的天线支架部件51,于所述全景无人机飞行时可转动至横向充当天线利于信号传输,避免飞行中遮挡到所述全景镜头而影响全景拍摄;且于所述全景无人机起飞或降落时,天线支架部件51可转动至纵向并充当落
地支架以提供缓冲,避免所述全景镜头的最低点直接接触地面以保护全景镜头;本实用新型实施例还提供了一种用于实时接收全景影像的fpv眼镜,用户通过佩戴所述fpv眼镜就能接收实时拍摄的影像,便于抓拍,提高拍摄效率,拍摄体验佳。
38.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。