1.本发明属于无人机技术领域,具体涉及一种多功能水文测量用无人机。
背景技术:
2.水文监测是指通过科学方法对自然界水的时空分布、变化规律进行监控、测量、分析以及预警等的一个复杂而全面的系统工程,水文监测系统适用于水文部门对江、河、湖泊、水库、渠道和地下水等水文参数进行实时监测,监测内容包括:水位、流量、流速等。
3.为保护水资源、防治水污染、改善水环境、修复水生态,“河长制”河湖管理保护机制应运而生。与此同时,依赖以人工勘测的水文监测方法存在着周期长、成本高、数据有限等问题。而无人机存在着灵活性高、数据采集全面、速度快的优势,因此无人机在水文监测领域应用逐渐广泛。
4.但是目前无人机在水文监测领域的应用存在着一些限制。首先传统无人机只能在地面起降和空中航行,这限制了无人机在水面进行任务作业。而水文监测的监测环境并不局限于晴天等天气,在恶劣的天气情况中也需要对江河湖泊的水文进行监测,但现有的无人机在恶劣天气中由于飞行环境差,操作人员无法保证监测的准确度,也无法实现将搜集和采集到数据进行实时回传。
技术实现要素:
5.本发明的目的是针对现有的技术存在的不足,提出了一种多功能水文测量用无人机,包括无人机本体,所述的无人机本体为圆型,所述的无人机本体上设有飞行装置、漂浮装置和水文测量装置。
6.所述的无人机本体的顶端设有警示灯,所述的无人机本体的四个方向上分别设有四个支臂,所述的四个支臂的末端设有螺旋桨。
7.所述的漂浮装置包括气口和气囊,所述的气口设在每个支架的中心处的底端面上,所述的气口的开口内设有气囊,所述的气囊通过气管与无人机本体内的微型气泵相连,且所述的气管上设有电磁阀。
8.所述的水文测量装置包括铅鱼,所述的铅鱼上通过连接装置固定有多普勒探头,所述的多普勒探头通过数据连接线与无人机本体相连,所述的铅鱼内设有取样腔,所述的取样腔为穿透式取样腔,所述的取样腔底端内壁上固定有胶皮内堵,所述的取样腔底端设有封堵,所述的封堵的底端面的中心处设有通口;所述的铅鱼底端设有两个连接座。
9.所述的无人机本体底端面的四角处分别设有连接口,所述的连接口与连接管套的一端相连,所述的连接管套的另一端与连接杆的一端相连,所述的连接杆的另一端与连接管套一端相连,所述的连接套管的另一端与连接架相连,所述的连接架为井字形连接架;所述的连接杆上套有配重块。
10.所述的连接架的四角处设有通过口,所述的通过口通过连接螺纹与着陆钉相连,所述的着陆钉包括壳体,所述的壳体内设有复位弹簧和长钉,所述的长钉上设有限位块,且
所述的限位块设在壳体内,所述的复位弹簧套在长钉上并设置在壳体内。
11.本发明的有益效果为:提出了一种结构紧凑的一种多功能水文测量用无人机:通过设置的铅鱼,实现了对水文监测中的水的流速、流向的检测,并取样,实现了多功能水文测量;通过气囊的设置,既可以防止无人机落水后进水造成损坏,又可以使铅鱼没入到水中实现对水文的测量作业;通过设置的着陆钉,可以在天气状况不好的情况下安装,并使无人机安全着陆;通过无人机自带的无线通讯系统,可以将多普勒探头采集到的数据进行实时的回传和分析,提高了工作效率。
附图说明
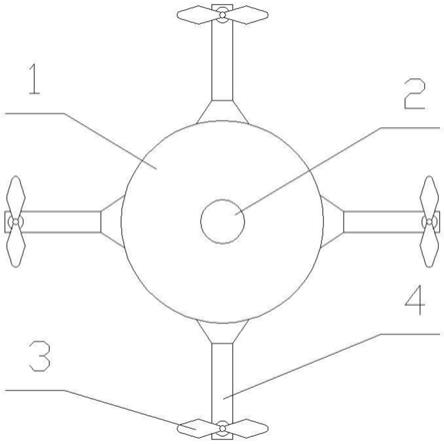
12.图1是本发明的无人机结构示意图。
13.图2是本发明的装配后的结构示意图。
14.图3是本发明的铅鱼的结构示意图。
15.图4是本发明着陆钉的结构示意图。
16.图5是本发明的控制主板结构框图。
17.图6是本发明操作流程图。
18.图中:1、无人机本体,2、警示灯,3、螺旋桨,4、支臂,5、气口,6、气囊,7、着陆钉,8、配重块,9、铅鱼,10、连接架,11、连接管套,12、连接杆,13、连接座,14、封堵,15、胶皮内堵,16、多普勒探头,17、数据连接线,18、取样腔,7-1、限位块,7-2、壳体,7-3、连接螺纹,7-4、长钉。
具体实施方式
19.附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
20.如图所示:一种多功能水文测量用无人机,包括无人机本体1,所述的无人机本体1为圆型,所述的无人机本体1上设有飞行装置、漂浮装置和水文测量装置。
21.所述的无人机本体1的顶端设有警示灯2,所述的无人机本体1的四个方向上分别设有四个支臂4,所述的四个支臂4的末端设有螺旋桨3。
22.所述的漂浮装置包括气口5和气囊6,所述的气口5设在每个支架的中心处的底端面上,所述的气口5的开口内设有气囊6,所述的气囊6通过气管与无人机本体1内的微型气泵相连,且所述的气管上设有电磁阀。
23.所述的水文测量装置包括铅鱼9,所述的铅鱼9上通过连接装置固定有多普勒探头16,所述的多普勒探头16通过数据连接线17与无人机本体1相连,所述的铅鱼9内设有取样腔18,所述的取样腔18为穿透式取样腔18,所述的取样腔18底端内壁上固定有胶皮内堵15,所述的取样腔18底端设有封堵14,所述的封堵14的底端面的中心处设有通口;所述的铅鱼9底端设有两个连接座13。
24.所述的无人机本体1底端面的四角处分别设有连接口,所述的连接口与连接管套11的一端相连,所述的连接管套11的另一端与连接杆12的一端相连,所述的连接杆12的另一端与连接管套11一端相连,所述的连接套管的另一端与连接架10相连,所述的连接架10
为井字形连接架10;所述的连接杆12上套有配重块8。
25.所述的连接架10的四角处设有通过口,所述的通过口通过连接螺纹7-3与着陆钉7相连,所述的着陆钉7包括壳体7-2,所述的壳体7-2内设有复位弹簧和长钉7-4,所述的长钉7-4上设有限位块7-1,且所述的限位块7-1设在壳体7-2内,所述的复位弹簧套在长钉7-4上并设置在壳体7-2内。
26.一种多功能水文测量用无人机,在使用时,将铅鱼9通过连接座13与连接架10进行连接,再将连接架10通过连接管套11和连接杆12与无人机本体1进行连接,连接完成之后将多普勒探头16通过数据线与无人机本体1的数据接口相连,通过数据接口给多普勒探头16进行信号传输和供电,此时操作员可以控制无人机起飞,并抵达指定水域进行水流、流向和取样的测量工作,当抵达到指定区域后,可以操作人员可以通过手机或电脑等与无人机本体1控制主板的通信模块进行信号连接,而多普勒探头16采集的数据则可以通过通信模块进行数据回传,实现数据实时同步,当无人机本体1抵达指定水域后,通过控制微型气泵对气囊6进行充气,使气囊6达到饱和状态,此时可以控制无人机本体1缓慢的降落到水面,并停止螺旋桨3旋转,并使用铅鱼9测量水流方向,通过多普勒探头16进行流速测量,通过铅鱼9内的取样腔18收集水质样本;铅鱼9调整方向后并随水流流出一段距离后可通过gps计算出水流方向;当使用多普勒探头16进行流速测量时,启动螺旋桨3,并通过gps的测定,使无人机停留在当前坐标以测量流速;而当流向和流速测量完成后,取样腔18内的水质的取样也会同时完成;气囊6的放气则可以通过电磁阀控制;当测量时天气状况不好,能见度低,风力较大时,可以选择安装着陆钉7,提高了无人机本体1在着陆时对地面的抓地力,防止无人机本体1被吹翻损坏,也防止取样腔18内的水质样本丢失。
27.本发明的操作流程为:第一步:操作人员对无人机及水文测量装置进行组装;
28.第二步:操作人员对现场天气情况进行判断;
29.第三步:天气情况良好,能见度高,不用安装着陆钉7;
30.第四步:天气情况差,能见度低,需要安装着陆钉7;
31.第五步:无人机与水文测量设备组装完成;
32.第六步:操作人员通过手机电脑等控制无人机起飞并对指定水域进行水文测量;
33.第七步:对指定水域进行:水流测量、流速测量、水质采样;
34.第八步:水文测量完成后操作人员控制无人机返回并将取样腔内的水质样品取出。
35.本发明提出了一种结构紧凑的一种多功能水文测量用无人机,通过设置的铅鱼9,实现了对水文监测中的水的流速、流向的检测,并取样,实现了多功能水文测量;通过气囊6的设置,既可以防止无人机落水后进水造成损坏,又可以使铅鱼9没入到水中实现对水文的测量作业;通过设置的着陆钉7,可以在天气状况不好的情况下安装,并使无人机安全着陆;通过无人机自带的无线通讯系统,可以将多普勒探头16采集到的数据进行实时的回传和分析,提高了工作效率。
36.最后说明的是,选取上述实施例并对其进行了详细的说明和描述是为了更好的说明本发明专利的技术方案,并不是想要局限于所示的细节。本领域的技术人员对本发明的技术方案进行修改或同等替换,而不脱离本发明技术方案的宗旨和范围的,均应涵盖在本发明的权利要求范围当中。