1.本发明涉及测试飞行器起落架以对制动系统之间的交叉连接进行测试的方法;利用飞行器起落架的转速计来产生测试信号的方法;以及配置成执行这些方法的飞行器起落架系统。
背景技术:
2.在飞行器起落架制动系统上的转速计、伺服阀或压力换能器改变时,可能需要进行测试,以确保未发生交叉连接。这通常通过启用防滑系统并且使用一对钻机使轮子以不同的速度转动来完成。飞行器驾驶舱中的操作员然后可以查看系统认为需要制动的轮子以及实际正在制动的轮子。
3.常规的方法面临许多问题。第一,起落架必须从地面升起,以使轮子能够转动。第二,需要一对钻机来将轮子转动得足够快,以便防滑系统识别差速。第三,该方法需要三名操作员:两名在地面上,并且一名在驾驶舱内。
技术实现要素:
4.本发明的第一方面提供了一种测试飞行器起落架的方法,该飞行器起落架包括:第一轮子和第二轮子;第一制动系统,该第一制动系统包括第一转速计和第一制动器,第一转速计安装至第一轮子并且构造成产生指示第一轮子的旋转的第一转速计信号,第一制动器构造成对第一轮子进行制动;第二制动系统,该第二制动系统包括第二转速计和第二制动器,第二转速计安装至第二轮子并且构造成产生指示第二轮子的旋转的第二转速计信号,第二制动器构造成对第二轮子进行制动;第一转速计输出线路和第二转速计输出线路;与第一转速计输出线路相关联的第一制动命令线路;以及与第二转速计输出线路相关联的第二制动命令线路。该方法包括:a)利用第一转速计产生测试信号,其中,第一轮子在测试信号产生期间不旋转;b)经由转速计输出线路中的一个转速计输出线路接收测试信号;c)响应于所接收的测试信号而发出制动命令,其中,该制动命令经由与转速计输出线路中的所述一个转速计输出线路相关联的制动命令线路而发出;以及d)监测第一制动系统或第二制动系统对制动命令的响应以对第一制动系统与第二制动系统之间的交叉连接进行测试。
5.测试信号可以通过使第一转速计的一部分旋转而产生。
6.第一转速计可以包括转速计转子和转速计传感器,转速计转子构造成随第一轮子旋转,转速计传感器构造成对转速计转子的旋转进行测量以产生第一转速计信号。测试信号可以通过使第一转速计的转速计传感器旋转或者通过使第一转速计的转速计转子旋转而产生
7.转速计的一部分可以被旋转小于一整圈。
8.转速计的一部分可以被来回旋转小于一整圈。
9.第一制动系统或第二制动系统的响应可以由察看第一制动器或第二制动器的人监测。
10.第一制动系统或第二制动系统的响应可以由自动监测系统监测。
11.监测第一制动系统或第二制动系统的响应可以包括监测第一制动系统或第二制动系统是否响应于制动命令。
12.监测第一制动系统或第二制动系统的响应可以包括监测制动器中的一个制动器是否已被采用并且未被释放。
13.制动命令可以在制动命令线路中的仅一个制动命令线路上发出。
14.如果第二制动系统响应于制动命令,则可以指示交叉连接。
15.监测第一制动系统或第二制动系统的响应可以包括监测第一制动系统或第二制动系统是否响应于制动命令,以对第一转速计与第二转速计之间的交叉连接进行测试。
16.可选地,第一制动系统包括第一伺服阀;第二制动系统包括第二伺服阀;制动命令被发出至伺服阀中的一个伺服阀;并且监测第一制动系统或第二制动系统的响应包括监测第一制动系统或第二制动系统是否响应于制动命令,以对第一伺服阀与第二伺服阀之间的交叉连接进行测试。
17.可选地,第一制动系统还包括第一压力换能器;第二制动系统还包括第二压力换能器;监测第一制动系统或第二制动系统的响应包括监测第一压力换能器或第二压力换能器是否响应于制动命令。
18.可选地,第一制动系统还包括第一压力换能器,第一压力换能器构造成测量第一制动系统中的液压压力以产生压力信号;第二制动系统还包括第二压力换能器,第二压力换能器构造成测量第二制动系统中的液压压力以产生压力信号;飞行器起落架还包括与第一转速计输出线路相关联的第一压力换能器线路和与第二转速计输出线路相关联的第二压力换能器线路;监测第一制动系统或第二制动系统的响应包括监测在第一压力换能器线路或第二压力换能器线路上是否接收到压力信号。
19.可选地,第一制动系统包括第一伺服阀和第一压力换能器;第二制动系统包括第二伺服阀和第二压力换能器;并且监测第一制动系统和第二制动系统的响应测试了第一转速计与第二转速计之间的交叉连接、第一伺服阀与第二伺服阀之间的交叉连接以及第一压力换能器与第二压力换能器之间的交叉连接。
20.本发明的另一方面提供了一种利用飞行器起落架的转速计产生测试信号的方法,该飞行器起落架包括:轮子;以及安装至轮子的转速计,其中,转速计包括转速计转子和转速计传感器,转速计转子构造成随轮子旋转,转速计传感器构造成对转速计转子的旋转进行测量,以产生指示轮子的旋转的转速计信号,该方法包括:通过将转速计转子与轮子断开联接然后使转速计转子在不使轮子旋转的情况下旋转而产生测试信号。
21.本发明的另一方面提供了一种飞行器起落架,该飞行器起落架包括:轮子;以及转速计,该转速计包括转速计转子和转速计传感器,转速计转子构造成随轮子旋转,转速计传感器构造成对转速计转子的旋转进行测量,以产生指示轮子的旋转的转速计信号,其中,转速计转子通过浮动连接器而连接至轮子,该浮动连接器构造成使转速计转子能够在不使轮子旋转的情况下旋转以产生测试信号。
22.浮动连接可以构造成使转速计转子能够在不使轮子旋转的情况下旋转超过10
°
。
23.本发明的另一方面提供了一种测试和修理飞行器起落架的方法,该方法包括:通过根据第一方面的方法测试飞行器起落架,以识别第一制动系统与第二制动系统之间的交
叉连接;以及响应于对交叉连接的识别而修理第一制动系统与第二制动系统之间的交叉连接。
24.本发明的另一方面提供了一种飞行器起落架系统,该飞行器起落架系统包括:第一轮子和第二轮子;第一制动系统,该第一制动系统包括安装至第一轮子的第一转速计和构造成对第一轮子进行制动的第一制动器,其中,第一转速计构造成产生指示第一轮子的旋转的第一转速计信号并且还构造成产生第一测试信号,其中,第一轮子在第一测试信号产生期间不旋转;第二制动系统包括安装至第二轮子的第二转速计和构造成对第二轮子进行制动的第二制动器,其中,第二转速计构造成产生指示第二轮子的旋转的第二转速计信号并且还构造成产生第二测试信号,其中,第二轮子在第二测试信号产生期间不旋转;第一转速计输出线路和第二转速计输出线路;与第一转速计输出线路相关联的第一制动命令线路;与第二转速计输出线路相关联的第二制动命令线路;以及制动控制及监测系统,该制动控制及监测系统配置成:经由转速计输出线路中的一个转速计输出线路接收第一测试信号或第二测试信号;响应于所接收的第一测试信号或第二测试信号而发出制动命令,其中,该制动命令经由与转速计输出线路中的一个转速计输出线路相关联的制动命令线路而发出;以及监测第一制动系统或第二制动系统对制动命令的响应,以对第一制动系统与第二制动系统之间的交叉连接进行测试。
25.第一转速计可以包括第一转速计转子和第一转速计传感器,第一转速计转子构造成随第一轮子旋转;第一转速计传感器构造成对第一转速计转子的旋转进行测量以产生第一转速计信号。
26.第二转速计可以包括第二转速计转子和第二转速计传感器,第二转速计转子构造成随第二轮子旋转;第二转速计传感器构造成对第二转速计转子的旋转进行测量以产生第二转速计信号。
27.第一转速计转子可以通过第一浮动连接器而连接至第一轮子,第一浮动连接器使第一转速计转子能够在不使第一轮子旋转的情况下旋转,以产生第一测试信号。替代性地,转速计传感器可以是能够旋转的,以产生测试信号,第一转速计转子和第一轮子两者在测试信号产生期间都保持静止。
28.第二转速计转子可以通过第二浮动连接器而连接至第二轮子,第二浮动连接器使第二转速计转子能够在不使第二轮子旋转的情况下旋转,以产生第二测试信号。替代性地,转速计传感器可以是能够旋转的,以产生测试信号,第二转速计转子和第二轮子两者在测试信号产生期间都保持静止。
附图说明
29.现在将参照附图描述本发明的实施方式,其中:
30.图1示出了飞行器;
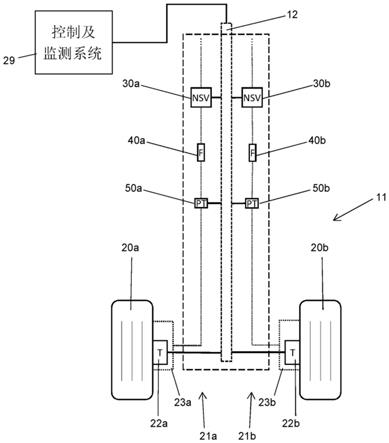
31.图2示出了起落架系统;
32.图3示出了起落架的线束线路;
33.图4示出了伺服阀交叉连接;
34.图5示出了压力换能器交叉连接;
35.图6示出了转速计交叉连接;
36.图7示出了测试起落架的第一轮子的方法;
37.图8示出了测试起落架的第二轮子的方法;
38.图9示出了第一转速计布置结构;
39.图10是图9的轮子的侧视图;
40.图11示出了转速计转子在其已与轮子断开联接之后被旋转;
41.图12示出了第二转速计布置结构;
42.图13是图12的轮子的侧视图,其中,转速计销与轮子断开接合;
43.图14是图12的轮子的侧视图,其中,转速计转子旋转成使得转速计销与轮子接合。
具体实施方式
44.图1中所示的飞行器10具有前起落架和一对主起落架11。在图2中详细示出了主起落架11中的一个主起落架以及该起落架的相关联的制动控制及监测系统29。
45.主起落架11包括第一轮子20a和第二轮子20b,第一轮子20a和第二轮子20b各自具有相关联的制动系统21a、21b。
46.第一制动系统21a包括第一转速计22a和第一制动器23a,第一转速计22a安装至第一轮子并且构造成产生指示第一轮子的旋转的第一转速计信号,第一制动器23a构造成对第一轮子进行制动。
47.第二制动系统21b包括第二转速计22b和第二制动器23b,第二转速计22b安装至第二轮子并且构造成产生指示第二轮子的旋转的第二转速计信号,第二制动器23b构造成对第二轮子进行制动。
48.制动系统21a、21b还包括第一伺服阀30a和第二伺服阀30b;第一熔断器40a和第二熔断器40b;以及第一压力换能器50a和第二压力换能器50b。
49.制动控制及监测系统29配置成通过向制动系统21a、21b发出制动命令并监测制动系统21a、21b的响应来控制并监测制动系统21a、21b,如下所述。
50.制动控制及监测系统29通过图2中所示的线束12连接至制动系统,其中,图3中示出了两组线束线路:第一组线束线路24a、31a、51a,制动控制及监测系统29使该第一组线束线路24a、31a、51a与彼此(并且与第一制动系统21a)相关联;以及第二组线束线路24b、31b、51b,制动控制及监测系统29使该第二组线束线路24b、31b、51b与彼此(并且与第二制动系统21b)相关联。
51.第一转速计22a和第二转速计22b连接至第一转速计输出线路24a和第二转速计输出线路24b;第一伺服阀30a和第二伺服阀30b连接至第一制动命令线路31a和第二制动命令线路31b;并且第一压力换能器50a和第二压力换能器50b连接至第一压力换能器输出线路51a和第二压力换能器输出线路51b。
52.第一制动命令线路31a、第一转速计输出线路24a和第一压力换能器输出线路51a彼此相关联;并且类似地,第二制动命令线路31b、第二转速计输出线路24b和第二压力换能器输出线路51b彼此相关联。
53.液压流体通过相应的液压线路60a、60b供应至第一制动系统和第二制动系统。
54.第一压力换能器40a构造成测量液压线路60a中的液压压力以产生压力信号。类似地,第二压力换能器40b构造成测量液压线路60b中的液压压力以产生压力信号。
55.图4至图6示出了在对制动系统的一个或更多个部件进行更换期间可能发生的第一制动系统与第二制动系统之间的各种交叉连接错误。
56.如果对伺服阀30a、30b进行更换,则伺服阀30a、30b与其相应的制动命令线路31a、31b断开连接,并且如图4中所示地安装新的伺服阀32a、32b。图4示出了其中新的伺服阀已经连接至错误的线束线路的伺服阀交叉连接错误。也就是说,第一制动系统21a的新伺服阀32a已经不正确地连接至第二制动系统21b的制动命令线路31b;并且第二制动系统21b的新伺服阀32b已经不正确地连接至第一制动系统21a的制动命令线路31a。
57.如果对压力换能器50a、50b进行更换,则压力换能器50a、50b与其相应的线束线路断开连接,并且如图5中所示地安装新的压力换能器52a、52b。图5示出了其中新的压力换能器已经连接至错误的线束线路的压力换能器交叉连接错误。也就是说,第一制动系统21a的新压力换能器52a已经不正确地连接至第二制动系统21b的压力换能器输出线路51b;并且第二制动系统21b的新压力换能器52b已经不正确地连接至第一制动系统21a的第一压力换能器输出线路51a。
58.如果对转速计22a、22b进行更换,则转速计22a、22b与其相应的线束线路断开连接,并且如图6中所示地安装新的转速计25a、25b。图6示出了其中新的转速计已经连接至错误的线束线路的转速计交叉连接错误。也就是说,第一制动系统21a的新转速计25a的输出端口已经不正确地连接至第二制动系统21b的第二转速计输出线路24b;并且第二制动系统21b的新转速计25b的输出端口已经不正确地连接至第一制动系统21a的第一转速计输出线路24a。
59.图7中示出了针对此类交叉连接而对飞行器起落架11进行测试的方法。应当注意,在图7中,第一轮子20a被称为轮子1,并且第二轮子20b被称为轮子2。
60.在步骤69中,由第一转速计22a产生第一测试信号。第一测试信号能够以下文参照图9至图14详细描述的多种方式产生。
61.一般而言,第一转速计22a包括:第一部分(转速计转子),第一部分构造成随第一轮子旋转;以及第二部分(转速计传感器),第二部分构造成对转速计转子的旋转进行测量以产生第一转速计信号。第一测试信号通过手动旋转转速计的一部分而产生:这一部分是转速计转子或转速计传感器。第一轮子20a在第一测试信号产生期间不旋转。
62.因此,第一转速计22a不仅构造成产生指示第一轮子20a的旋转的第一转速计信号,而且还可以构造成产生第一测试信号。第一轮子20a在第一测试信号产生期间不旋转。
63.转速计的一部分可以被来回旋转、通常旋转小于一整圈。测试信号可以持续产生任何时间段。例如,转速计的一部分可以被来回旋转1.5s、500ms或150ms。
64.这产生了第一测试信号,该第一测试信号通过第一制动系统的第一转速计输出线路24a、或者在如图6中所示的转速计交叉连接错误的情况下通过第二制动系统的第二转速计输出线路24b馈送至制动控制及监测系统29。
65.制动控制及监测系统29配置成:经由转速计输出线路中的一个转速计输出线路接收第一测试信号;响应于接收到的第一测试信号而发出制动命令;以及监测第一制动系统或第二制动系统对该制动命令的响应,以测试第一制动系统与第二制动系统之间的交叉连接。
66.在步骤70处,由制动控制及监测系统29经由转速计输出线路中的一个转速计输出
线路接收第一测试信号,并且经由制动命令线路而发出制动命令,制动控制及监测系统29使该制动命令线路与所述转速计输出线路中的一个转速计输出线路(即,在其上接收第一测试信号的转速计输出线路)相关联。换言之,如果经由第一转速计输出线路24a接收到第一测试信号,则经由第一制动命令线路31a发出制动命令;并且,如果经由第二转速计输出线路24b接收到第一测试信号,则经由第二制动命令线路31b发出制动命令。应当注意,制动命令仅在制动命令线路中的一个制动命令线路上发出。
67.制动系统的响应由制动控制及监测系统29通过监测在第一压力换能器线路或第二压力换能器线路上是否接收到压力信号而自动监测。第一制动系统或第二制动系统的响应也由地面上的操作员通过观察制动器的操作而手动监测。
68.图7示出了对制动命令的四组可能的响应。
69.在没有交叉连接的情况下,由于未发生转速计交叉连接错误,因此在制动控制及监测系统29处从第一制动系统的第一转速计输出线路24a接收第一测试信号。这导致制动命令通过第一制动系统21a的与第一转速计输出线路24a相关联的制动命令线路31a上的信号向第一制动系统发出。由于未发生伺服阀交叉连接错误,因此这将导致伺服阀30a打开并且经由液压线路60a操作第一制动器23a。
70.控制及监测系统29还经由第一压力换能器输出线路51a从第一压力换能器50a接收指示正确的液压线路60a上的压力已经改变的压力信号。在第一制动器23a被应用时,压力增加,并且第一压力换能器50a将“增加的压力”压力信号经由第一压力换能器输出线路51a传送至控制及监测系统29。这用作为对正确的制动器正被应用的确认,这是因为“增加的压力”压力信号是从正确的(第一)压力换能器输出线路51a接收的。在10秒之后,控制及监测系统29命令第一伺服阀30a复位。这导致压力下降并且第一制动器23a释放。第一压力换能器50a将“降低的压力”压力信号经由第一压力换能器输出线路51a传送至控制及监测系统29。这用作为对第一制动器已经释放的确认。在步骤71处,控制及监测系统29通过在驾驶舱12中的驾驶舱显示装置中显示“轮子1测试完成”来响应针对“降低的压力”压力信号的接收。
71.在地面上对转速计的一部分进行手动旋转的操作员察看第一制动器23a和第二制动器23b,并且在步骤72处,操作员观察到正确的制动器(即,第一制动器23a)已被应用了10秒然后被释放。
72.在地面上已经对转速计的一部分进行手动旋转并且在步骤72处观察到正确的制动器(即,第一制动器23a)已经被应用并释放的操作员然后可以移动至驾驶舱并且观察“轮子1测试完成”的消息,以便复查未发生交叉连接(因为地面上的操作员知道轮子1为正确的轮子)。替代性地,可以由驾驶舱内的第二位人类操作员观察驾驶舱显示器,这位操作员与地面上的操作员通信以确定当前正在测试哪个轮子(即,哪个转速计被地面上的操作员转动)并且确认未发生交叉连接。
73.在转速计交叉连接的情况下,在地面上对转速计的一部分进行手动旋转的操作员察看第一制动器23a和第二制动器23b,并且在步骤73处,该操作员观察到不正确的制动器(即,第二制动器23b)已被应用和释放。
74.由于发生转速计交叉连接错误,因此在制动控制及监测系统29处从第二制动系统的第二转速计输出线路24b接收第一测试信号。这导致制动命令通过第二制动系统21b的第
二制动命令线路31b上的信号向第二制动系统发出,制动控制及监测系统29使该第二制动命令线路31b与第二转速计输出线路24b相关联。由于未发生伺服阀交叉连接错误,因此这将导致第二伺服阀30b打开并且经由液压线路60b操作第二制动器23b。
75.控制及监测系统29还经由第二压力换能器输出线路51b从第二压力换能器50b接收指示第二液压线路60b上的压力已经改变的信号。在第二制动器23b被应用时,压力增加,并且第二压力换能器50b将“增加的压力”压力信号经由第二压力换能器输出线路51b传送至控制及监测系统29。这用作为对不正确的(第二)制动器正被应用的确认,这是因为“增加的压力”压力信号是从第二压力换能器输出线路51a接收的。在10秒之后,控制及监测系统29命令第二伺服阀30b复位。这导致压力下降并且第二制动器23b释放。第二压力换能器50b将“降低的压力”压力信号经由第二压力换能器输出线路51b传送至控制及监测系统29。这用作为对第二制动器已释放的确认。在步骤74处,控制及监测系统29通过在驾驶舱12的驾驶舱显示装置中显示“轮子2测试完成”来响应针对该“降低的压力”压力信号的接收。
76.在地面上已经对转速计的一部分进行手动旋转并且在步骤73处观察到不正确的制动器(即,第二制动器23b)已被应用和释放的操作员然后可以移动至驾驶舱并观察“轮子2测试完成”的消息,以确定发生了转速计交叉连接而非伺服阀交叉连接(应当注意,地面上的操作员知道轮子2是不正确的轮子)。替代性地,可以由第二位人类操作员观察驾驶舱显示器,这位操作员与地面上的操作员通信,以确定当前正在测试哪个轮子(即,哪个转速计被地面上的操作员转动)并且指示存在转速计交叉连接。
77.在步骤75处,一旦已经识别出转速计交叉连接,则通过调换第一转速计输出线路24a和第二转速计输出线路24b使第一转速计输出线路24a和第二转速计输出线路24b分别连接至第一转速计25a和第二转速计25b来修理该转速计交叉连接。因此,响应于对转速计交叉连接的判定而执行修理。
78.在压力换能器交叉连接的情况下,在地面上对转速计的一部分进行手动旋转的操作员察看第一制动器23a和第二制动器23b,并且在步骤76处,该操作员观察到正确的制动器(即,第一制动器23a)已被应用但未释放。
79.因为未发生转速计交叉连接错误,因此在制动控制及监测系统29处从第一制动系统的第一转速计输出线路24a接收第一测试信号。这导致制动命令通过第一制动系统21a的第一制动命令线路31a上的信号向第一制动系统发出,制动控制及监测系统29使该第一制动命令线路31a与第一转速计输出线路24a相关联。由于未发生伺服阀交叉连接错误,这将导致伺服阀30a打开并且经由液压线路60a操作第一制动器23a。
80.控制及监测系统29还从第二压力换能器输出线路51b接收压力信号。在第一制动器23a被应用时,压力增加,并且第二压力换能器将“增加的压力”压力信号经由第二压力换能器输出线路51b传送至控制及监测系统29。
81.控制及监测系统29监测第一压力换能器或第二压力换能器是否响应制动命令。在这种情况下,控制及监测系统29期望来自第一压力换能器输出线路51a的信号(因为控制及监测系统29将第一压力换能器输出线路51a与第一转速计输出线路24a相关联)但却反而接收到来自第二压力换能器输出线路51b的信号。缺失期望的来自第一压力换能器输出线路51a的信号意味着控制及监测系统29不会命令第一伺服阀30a复位。而是,在步骤77处,控制及监测系统29通过在驾驶舱12中的驾驶舱显示装置上显示“轮子1压力故障”来响应缺失第
一压力换能器输出线路51a上信号。
82.在地面上已经对转速计的一部分进行手动旋转并且在步骤76处观察到正确的制动器(即,第一制动器23a)已被应用而未释放的操作员然后可以移动至驾驶舱并且察看到“轮子1压力故障”的消息,以对发生压力换能器交叉连接进行复查(因为地面上的操作员知道轮子1是正确的轮子)。替代性地,可以由第二位人类操作员观察驾驶舱显示器,这位操作员与地面上的操作员通信,以确定当前正在测试哪个轮子(即,哪个转速计被地面上的操作员转动)并且指示发生了压力换能器交叉连接。
83.在步骤78处,一旦已经确认压力换能器交叉连接,则通过调换第一压力输出线路51a和第二压力输出线路51b使得第一压力输出线路51a和第二压力输出线路51b分别连接至第一压力换能器52a和第二压力换能器52b来修理该压力换能器交叉连接。因此,响应于对压力换能器交叉连接的判定来执行修理。
84.在伺服阀交叉连接的情况下,在地面上对转速计的一部分进行手动旋转的操作员观察第一制动器23a和第二制动器23b的响应,并且在步骤79处,该操作员观察到不正确的制动器(即,第二制动器23b)已被应用和释放。
85.因为未发生转速计交叉连接错误,因此在制动控制及监测系统29处从第一制动系统的第一转速计输出线路24a接收第一测试信号。这导致在第一制动命令线路31a上发出制动命令,该第一制动命令线路31a与第一转速计输出线路24a相关联但错误地连接至第二制动系统21b。这导致第二伺服阀30b打开并且经由液压线路60b操作第二制动器23b。
86.控制及监测系统29还接收来自第二压力换能器输出线路51b的信号。在第二制动器23b被应用时,压力增加,并且第二压力换能器将“增加的压力”压力信号经由第二压力换能器输出线路51b传送至控制及监测系统29。
87.控制及监测系统29监测第一压力换能器或第二压力换能器是否响应制动命令。在这种情况下,控制及监测系统29期望来自第一压力换能器输出线路51a的信号,但却反而接收到来自第二压力换能器输出线路51b的信号。缺失来自第一压力换能器输出线路51a的信号意味着控制及监测系统29不命令伺服阀复位。而是,在步骤80处,控制及监测系统29通过在驾驶舱12中的驾驶舱显示装置上显示“轮子1压力故障”来响应缺失第一压力换能器输出线路51a上信号。
88.在地面上已经对转速计的一部分进行手动旋转并且在步骤79处观察到不正确的制动器(即,第二制动器23b)已被应用和释放的操作员然后可以移动至驾驶舱并且察看“轮子1压力故障”的消息,以确定发生了伺服阀交叉连接而非转速计交叉连接(应当注意,地面上的操作员知道轮子2是不正确的轮子)。替代性地,可以由第二位人类操作员观察驾驶舱显示器,这位操作员与地面上的操作员通信,以确定当前正在测试哪个轮子(即,哪个转速计被地面上的操作员转动)并识别发生了伺服阀交叉连接。
89.在步骤81处,一旦已经识别出伺服阀交叉连接,则通过调换第一制动命令线路31a和第二制动命令线路31b使得第一制动命令线路31a和第二制动命令线路31b分别连接至第一伺服阀32a和第二伺服阀32b来修理该伺服阀交叉连接。因此,响应于对伺服阀交叉连接的判定来执行该修理。
90.第二转速计22b与第一转速计22a相同。因此,第二转速计22b不仅构造成产生指示第二轮子20b的旋转的第二转速计信号,而且第二转速计22b还构造成产生第二测试信号。
第二轮子20b在第二测试信号产生期间不旋转。
91.因此,针对第二轮子,可以通过旋转第二转速计的转速计转子然后监测制动系统的响应来重复图7的方法,如图8中所示。应当注意,在图8中,第一轮子20a被称为轮子1,并且第二轮子20b被称为轮子2。
92.上述方法与常规的测试起落架交叉连接的方法相比具有各种优点。第一,不需要抬起起落架来确保轮子转动。第二,不需要一对钻机来转动轮子。第三,该方法仅需要一名或两名操作员:一名操作员在地面上转动转速计,并且可选的另一名操作员位于驾驶舱中。
93.在图7或图8的实施方式中,测试信号通过使转速计的一部分旋转而产生。在替代性实施方式中,测试信号可以在无需使转速计的任何部分旋转的情况下由转速计以电子的方式产生。
94.在图7和图8的实施方式中,通过将转速计的一部分以小于一整圈的方式来回旋转而产生测试信号。在其他实施方式中,转速计的一部分可以仅在一个方向上旋转和/或可以旋转超过一整圈。
95.在图7和图8的实施方式中,第一制动系统或第二制动系统的响应由察看着第一制动器或第二制动器的人手动监测,并且第一制动系统或第二制动系统的响应还由对压力换能器的响应进行监测的自动监测系统(控制及监测系统29)自动监测。这是优选的,因为这可以提供对交叉连接的识别的复查,以及/或者能够有助于在转速计交叉连接与伺服阀交叉连接之间进行区分。在替代性实施方式中,第一制动系统或第二制动系统的响应可以仅被手动监测或仅被自动监测。
96.在图7和图8的实施方式中,该方法包括:监测哪个制动系统响应于制动命令、监测制动器中的一个制动器是否已被应用而未被释放、以及监测哪个压力换能器线路响应于制动命令。可以设想到监测响应的其他方式。
97.在图7和图8的实施方式中,对第一制动系统和第二制动系统的响应进行监测以测试下述三种类型的交叉连接:第一转速计与第二转速计之间的交叉连接、第一伺服阀与第二伺服阀之间的交叉连接、以及第一压力换能器与第二压力换能器之间的交叉连接。在其他实施方式中,该方法可以仅用于测试一种或两种类型的交叉连接。例如,如果仅对转速计进行修理,则可能仅需要测试转速计交叉连接。在这种情况下,由地面上的操作员观察到不正确的制动器被应用就能足够指示转速计交叉连接。
98.图9和图12示出了构造成产生上面提到的测试信号的两种不同的转速计布置结构,其中,轮子在测试信号产生期间不旋转。
99.图9详细地示出了第一转速计22a和第二转速计22b的第一布置结构。这两个转速计22a、22b是相同的,因此两者以单个图示出。
100.每个转速计包括转速计转子101a、101b、102a、102b和转速计传感器100a、100b,转速计转子101a、101b、102a、102b构造成随轮子20a、20b旋转,转速计传感器100a、100b构造成对转速计转子的旋转进行测量,以产生指示轮子的旋转的转速计信号。在这种情况下,转速计转子是带有方形定位销102a、102b的筒形轴101a、101b。轴101a、101b被接纳在转速计传感器100a、100b的内部,但是其他物理布置也是可能的。转速计传感器100a、100b可以通过任何适合的方式比如磁性或光学测量来测量轴101a、101b的旋转。
101.轮子20a、20b包括轮体110a、110b和轮胎111a、111b。轮体110a、110b安装在轮轴
112a、112b上。轮轴与轮子之间的轴承使轮子能够相对于轮轴112a、112b旋转。转速计传感器100a、100b不随轮子旋转并且容置在也不随轮子旋转的轮轴112a、112b的内部。
102.转速计转子通过锁定板115a、115b联接至轮体110a、110b。方形定位销102a、102b被接纳在锁定板115a、115b中的方形孔口中。锁定板115a、115b通过图10中所示的螺栓113a、113b紧固至轮体。
103.测试信号通过下述方式产生:将转速计转子101a、101b;102a、102b与轮子断开联接,用手抓握轴101a、101b,然后在不使轮子旋转的情况下手动将轴101a、101b旋转。具体地,螺栓113a、113b和锁定板115a、115b被移除,以使转速计转子与轮体断开联接,使得转速计转子独立于轮子自由旋转。
104.图11示出了转速计转子被顺时针旋转并且还示出了位于轮体中的接纳螺栓113a、113b的螺栓孔114a、114b。测试已经表明,测试信号可以通过将转速计转子旋转短至150ms而生成,但是通常转速计转子会来回旋转一更长的时间段。
105.图12至图14示出了第二转速计布置结构。许多元件与图9至图11中相同,并且针对这些元件使用相同的附图标记。
106.在这种情况下,转速计转子通过浮动连接器而连接至轮体,该浮动连接器构造成能够使转速计转子在不使轮子旋转的情况下旋转以产生测试信号。更具体地,转速计转子的轴101a、101b在其远端端部处承载有销120a、120b,并且轮体110a、110b具有如图13中所示的一对止挡部121a、121b。转速计转子自由旋转,直到销120a、120b如图14中所示的那样接合止挡部121a、121b为止。在轮子旋转期间,止挡部121a、121b与销120a、120b保持接触,因此转速计转子被迫与轮子一起转动。当轮子静止时,基于地面的操作者可以抓握销120a、120b并手动将销120a、120b来回旋转,以产生测试信号。
107.在这种情况下,浮动连接器构造成使转速计转子能够在不使轮子旋转的情况下旋转大约90
°
,但在本发明的其他实施方式中,浮动连接器可能仅能够实现较小范围的运动。优选地,浮动连接器构造成使转速计转子能够在不使轮子旋转的情况下旋转超过10
°
、20
°
或30
°
。
108.在出现“或”一词的情况下,这将被解释为表示“和/或”,使得所指的事物不一定是相互排斥的并且可以以任何适当的组合使用。
109.虽然上面已经参照一个或更多个优选实施方式描述了本发明,但是应当理解,在不脱离如所附权利要求所限定的本发明范围的情况下,可以进行各种改变或修改。