1.本发明涉及航空航天领域,特别涉及一种空间非合作目标的捕获装置及其捕获方法。
背景技术:
2.进行太空探测工程时,采样探测器常常要将样品在轨释放,由返回航天器进行再捕获,实现样品在轨转移功能,从而避开两飞行器之间复杂的交会对接操作,释放后的样品不会主动调整自身的位置姿态,没有安装特定的对接接口,也不会主动调整自身的位置姿态,也无相对测量敏感器,是一种新的样品转移返回的技术途径,属于典型的非合作目标。其研究始于20世纪80年代,各航天大国分别针对不同的非合作目标开展了很多的研究工作,除少数国家进行了实验以外,目前大部分技术方案都处于理论分析和验证阶段。欧美、日本在空间自主交会对接、空间机械臂等空间非合作目标交会对接技术方面取得了很大的进展。相比于结构复杂的合作目标对接而言,非合作目标捕获技术适用范围更广、发展前景更好。该项技术的研究对航天事业的发展有着积极的推动作用。
3.这项技术也可以应用到很多空间任务中。比如,对未成功进入预定轨道的卫星进行辅助入轨;对发生故障的卫星进行维修;对燃料耗尽的航天器加注燃料以延长寿命;将废弃卫星或空间碎片送入坟墓轨道等等。可以看出,无论在军事战略还是民用经济中,非合作目标捕获技术都扮演着重要的角色,具有很大的应用潜力和研究价值。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种空间非合作目标的捕获装置及其捕获方法,主要是通过设置捕获系统和支撑驱动系统,并分别驱动上圆盘和下圆盘的转动从而带动与第一直线滑块的内滑块和与第二直线滑块的外滑块的滑动,从而使得四组伸缩杆和导帘在拉杆的带动下,完成捕获系统的伸缩和拉伸运动进而实现捕获空间的扩大和缩小,并对目标样品的快速定位和捕捉回收,整个装置工作效率高。
5.本发明提供了一种空间非合作目标的捕获装置,其包括捕获系统、顶板、支撑驱动系统和样品舱,所述捕获系统和所述顶板的上端连接,所述支撑驱动系统和所述顶板的下端连接,所述样品舱通过法兰盘和所述顶板上端的中心固定连接,所述顶板的四个顶角通过支撑立柱和地面连接。所述捕获系统,其包括顶部导帘、伸缩杆、套筒、内滑块、外滑块、拉杆、中部导帘和防逃逸限位组件,相邻的两个顶部导帘的首末端依次连接,所述顶部导帘的末端和所述伸缩杆上端的第一安装端连接,所述伸缩杆上端的第二安装端通过套筒的第一端连接,所述套筒的第二端和所述拉杆的第一端连接,所述拉杆的第二端和所述外滑块的第一端连接,所述伸缩杆下端和所述内滑块的第一端连接,所述中部导帘的首末两端分别与相邻两个伸缩杆的中部连接,所述内滑块和所述外滑块的第二端分别位于所述顶板上端的水平凹槽内。所述防逃逸限位组件,其包括顶部限位板、顶部限位销和顶部限位短销,所述顶部限位板的第一端设有通孔,所述通孔和所述顶部限位销的第一端连接,所述顶部限
位板的第二端和所述顶部限位短销的第一端连接,所述顶部限位销的第二端和所述顶部限位短销的第二端分别与所述顶部导帘的第一安装端和第二安装端固定连接,相邻两个顶部限位板的第二端接触连接。所述支撑驱动系统,其包括圆盘轴、上圆盘、下圆盘、第一直线滑块、第一直线导轨、第二直线滑块、第二直线导轨、外圆杆和法兰盘,所述法兰盘位于所述顶板上端的中心,所述法兰盘的上端和所述样品舱固定连接,所述法兰盘的下端和所述圆盘轴的第一安装端固定连接,所述上圆盘的中心孔和所述圆盘轴的第二安装端连接,所述下圆盘的中心孔和所述圆盘轴的第三安装端固定连接,所述内滑块和所述外滑块的第三端分别通过外圆杆与所述第一直线滑块和所述第二直线滑块的第一端固定连接,所述第一直线滑块和所述第二直线滑块的第二端分别与所述第一直线导轨和所述第二直线导轨的第一端滑动连接,所述第一直线导轨和所述第二直线导轨的第二端分别与所述下圆盘和所述上圆盘的连接筋固定连接。
6.可优选的是,所述顶部导帘,其包括第一滑轨、第二滑轨、第三滑轨和第四滑轨,所述第一滑轨、所述第二滑轨、所述第三滑轨和所述第四滑轨依次滑动连接。
7.可优选的是,在所述顶部导帘中,所述第一滑轨、所述第二滑轨、所述第三滑轨和所述第四滑轨的轴线在同一条直线上;所述圆盘轴、所述上圆盘、所述下圆盘和所述法兰盘的轴线在同一条直线上。
8.可优选的是,所述顶部导帘、所述伸缩杆、所述套筒、所述内滑块、所述外滑块、所述拉杆、所述防逃逸限位组件、所述第一直线滑块、所述第一直线导轨、所述第二直线滑块和所述第二直线导轨的数量相等;所述中部导帘的数量是所述伸缩杆关节数的四倍。
9.可优选的是,所述顶部限位板的长度小于所述顶部导帘的最大长度。
10.可优选的是,所述顶板上端的水平凹槽互相垂直。
11.本发明的第二方面,提供一种应用前述空间非合作目标的捕获装置的捕获方法,其包括以下步骤:
12.s1、捕获装置展开:启动下圆盘,使下圆盘逆时针转动,此时内滑块在在第一直线滑块的带动下向远离下圆盘中心的方向移动,外滑块固定不动,伸缩杆在连杆的带动下从收缩状态变为展开状态,与伸缩杆连接的顶部导帘和中部导帘依次展开,得到初始捕获空间;
13.s2、捕获装置对目标样品捕获:当目标样品进入捕获空间后,依次启动上圆盘和下圆盘,使上圆盘和下圆盘均按着顺时针转动,此时内滑块和外滑块分别在第一直线滑块和第二直线滑块带动下向靠近下圆盘中心的方向移动,且伸缩杆和导帘收缩到恰好容纳目标样品的捕获空间;
14.s3、捕获装置收缩:在导帘的收缩过程中,与顶部导帘连接的防逃逸限位组件中的顶部限位板在顶部限位销的导向作用下,逐渐将捕获空间的顶部密封,防止目标样品的逃逸;
15.s4、捕获装置对目标样品回收:在将目标样品完全封闭后,启动上圆盘,使上圆盘逆时针转动,此时外滑块在第二直线滑块的带动下向远离上圆盘中心的方向移动,内滑块固定不动,此时伸缩杆在连杆的带动下,其高度逐渐缩小,在防逃逸限位组件中顶部限位板的作用下,将目标样品压入样品舱中。
16.本发明与现有技术相比,具有如下优点:
17.1.本发明装置在未开始工作及工作完成后结构整体处于收拢状态,占用空间相对较小,同时操作方便,运行稳定;
18.2.本发明装置避免了对此交会对接和分离释放,不需要一系列繁杂的太空操作任务,如高精度的在轨交会与停靠操作以及采用专用的对接机构进行对接操作;
19.3.本发明装置在整体设计中采用了分阶段捕获思想,通过分阶段控制,分别驱动上圆盘和下圆盘的转动从而带动内滑块和外滑块滑动使得四组伸缩杆及导帘的完成伸缩和拉伸运动进而实现了捕获空间的扩大和缩小,该设计思想使得捕获过程更加简单可靠,提高了捕获装置对目标捕获的效率。
附图说明
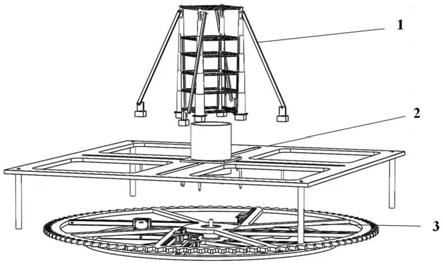
20.图1为本发明空间非合作目标的捕获装置的爆炸结构图;
21.图2为本发明空间非合作目标的捕获装置中捕获系统的结构图;
22.图3为本发明空间非合作目标的捕获装置中顶部限位组件的结构图;
23.图4为本发明空间非合作目标的捕获装置中导帘的结构图;
24.图5为本发明空间非合作目标的捕获装置中支撑驱动系统的结构图;
25.图6为本发明空间非合作目标的捕获装置中导轨滑块的结构图;
26.图7a为本发明空间非合作目标的捕获装置的初始状态图;
27.图7b为本发明空间非合作目标的捕获装置的第一动作过程图;
28.图7c为本发明空间非合作目标的捕获装置的第二动作过程图;
29.图7d为本发明空间非合作目标的捕获装置的第三动作过程图。
30.主要附图标记:
31.捕获系统1,顶板2,支撑驱动系统3,顶部导帘4,第一滑轨401,第二滑轨402,第三滑轨403,第四滑轨404,伸缩杆5,套筒6,内滑块7,外滑块8,拉杆9,顶部限位板10,顶部限位销11,顶部限位短销12,圆盘轴13,上圆盘14,下圆盘15,第二直线滑块16,第二直线导轨17,外圆杆18,目标样品19,样品舱20,支撑立柱21,法兰盘22,第一直线滑块23,第一直线导轨24,中部导帘25。
具体实施方式
32.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
33.针对于目前目标样品19以非对接的方式经采样器在轨释放后的情况,本发明提供一种空间非合作目标的捕获装置,该装置环境适应性好,可靠性强,能够实现对目标样品19的自动捕获。如图1所示,包括捕获系统1、顶板2、支撑驱动系统3和样品舱20,顶板2的上端设有四条水平凹槽,且互相垂直,内滑块7和外滑块8可在滑槽上移动。捕获系统1和顶板2的上端连接,支撑驱动系统3和顶板2的下端连接,样品舱20通过法兰盘22和顶板2上端的中心固定连接,顶板2四周有四根支撑立柱21,通过螺栓连接固定在顶部下端支撑起顶板2。
34.捕获系统1,如图2所示,包括顶部导帘4、伸缩杆5、套筒6、内滑块7、外滑块8、拉杆9、中部导帘25和防逃逸限位组件,伸缩杆5采用多级伸缩的结构形式,内滑块7和外滑块8上开有内螺纹孔,拉杆9的两端设有通孔,因连杆9的长度不变,所以在内滑块7和外滑块8运动
过程中可由连杆9带动伸缩杆5完成伸缩过程。
35.具体而言,顶部导帘4设计成四节滑轨式结构,各节滑轨之间可随着伸缩杆5的移动而滑动,第一滑轨401和第二滑轨402需要连接顶部的防逃逸限位组件,因此将安装端设为镂空。如图4所示,包括第一滑轨401、第二滑轨402、第三滑轨403和第四滑轨404,第一滑轨401、第二滑轨402、第三滑轨403和第四滑轨404依次滑动连接,第一滑轨401、第二滑轨402、第三滑轨403和第四滑轨404的轴线在同一条直线上。
36.相邻的两个顶部导帘4的首末端依次连接,顶部导帘4的末端和伸缩杆5上端的第一安装端连接,伸缩杆5上端的第二安装端通过套筒6的第一端连接,套筒6的第二端和拉杆9的第一端连接,拉杆9的第二端和外滑块8的第一端连接,伸缩杆5下端通过过盈装配和内滑块7的第一端固定连接,中部导帘25的首末两端分别通过铰接方式与相邻两个伸缩杆5的中部连接,内滑块7和外滑块8的第二端分别位于顶板2上端的水平凹槽内,在对目标样品19的捕获过程中通过内滑块7带动伸缩杆5移动实现捕获空间的扩大和缩小。
37.防逃逸限位组件,如图3所示,包括顶部限位板10、顶部限位销11和顶部限位短销12,顶部限位板10的第一端设有通孔,通孔和顶部限位销11的第一端连接,顶部限位板10的第二端和顶部限位短销12的第一端连接,顶部限位销11的第二端和顶部限位短销12的第二端分别与顶部导帘4的第一滑轨401和第二滑轨402固定连接,相邻两个顶部限位板10的第二端接触连接。具体而言,顶部限位板10的长度小于顶部导帘4的最大长度。工作过程中由于导帘4各节发生滑动,从而带动顶部限位销11沿着顶部限位板10的滑槽发生移动,因此实现了对顶部空间的封闭,保证了在捕获到目标样品19后不会逃逸出本装置。
38.支撑驱动系统3,如图5和图6所示,包括圆盘轴13、上圆盘14、下圆盘15、第一直线滑块23、第一直线导轨24、第二直线滑块16、第二直线导轨17、外圆杆18和法兰盘22,优选地,圆盘轴13、上圆盘14、下圆盘15和法兰盘22的轴线在同一条直线上。法兰盘22位于顶板2上端的中心,并通过螺栓固定在顶板2上,法兰盘22的上端和样品舱20固定连接,法兰盘22的下端和圆盘轴13的第一安装端固定连接,上圆盘14的中心孔通过轴承和圆盘轴13的第二安装端连接,下圆盘15的中心孔通过过盈配合和圆盘轴13的第三安装端固定连接,从而上圆盘14和下圆盘15可分别在电机驱动下进行独立转动,在圆盘轴13下端装接驱动圆盘轴13转动的电机,从而带动下圆盘15转动,在上圆盘14外端接有电机驱动的齿轮,该齿轮可与上圆盘14外端的齿轮啮合,从而驱动上圆盘14转动。
39.如图6所示,内滑块7和外滑块8的第三端通过内螺纹与两个相同的外圆杆18第一端的外螺纹连接,两个相同的外圆杆18第二端固连在第一直线导轨23和第二直线导轨滑块16上,第一直线滑块23和第二直线滑块16的第二端分别与第一直线导轨24和第二直线导轨17的第一端滑动连接,第一直线导轨24和第二直线导轨17的第二端分别与下圆盘15和上圆盘14的连接筋固定连接,工作过程中第一直线导轨23和第二直线导轨滑块16分别通过外圆杆18带动内滑块7和外滑块8沿顶板2的滑槽移动。
40.当上圆盘14发生转动时带动第二直线滑块16沿着第二直线导轨17移动,由于第二直线滑块16与外圆杆18和外滑块8固连,所以在第二直线滑块16沿着第二直线滑轨17移动时,外滑块8也同时沿着顶板2上的滑槽移动。当下圆盘15发生转动时带动第一直线滑块23沿着第一直线导轨24移动,由于第一直线滑块23与外圆杆18和内滑块7固连,所以在第一直线导轨滑块23沿着第一直线导轨24移动时,内滑块7也同时沿着顶板2上的滑槽移动。
41.在本发明的一个优选实施例中,顶部导帘4、伸缩杆5、套筒6、内滑块7、外滑块8、拉杆9、防逃逸限位组件、第一直线滑块23、第一直线导轨24、第二直线滑块16和第二直线导轨17的数量相等;中部导帘25的数量是伸缩杆5关节数的四倍。
42.以下结合实施例对本发明一种空间非合作目标的捕获装置及其捕获方法做进一步描述:
43.本发明具有非合作目标的捕获方法是这样实现地:
44.本发明装置在未工作时处于初始状态,如图7a所示,初始状态中外滑块8处于顶板2上滑槽的外端,内滑块7处于顶板2上滑槽内端,此时伸缩杆5处于最短状态,此时捕获空间处于最小状态。在接到捕获任务后,捕获装置开始工作,具体工作过程如下:
45.s1、捕获装置展开:根据工作要求,如图7b所示,启动与下圆盘15连接的第一驱动电机,在圆盘轴13的带动下,使下圆盘15逆时针转动,此时内滑块7在在第一直线滑块23的带动下向远离下圆盘15中心的方向移动,外滑块8固定不动,伸缩杆5在连杆9的带动下从收缩状态变为展开状态,伸缩杆5也向外移动,与伸缩杆5连接的顶部导帘4和中部导帘25依次展开,得到初始捕获空间,最终实现捕获空间的扩展,然后本装置进入张开等待状态,开始等待待捕获的目标样品19。
46.s2、捕获装置对目标样品19捕获:如图7c所示,当检测传感器检测到目标样品19进入捕获空间后,依次启动与上圆盘14连接的第二驱动电机和与下圆盘15连接的第一驱动电机,上圆盘14在齿轮轴与自身齿的啮合下按着顺时针转动,下圆盘15在圆盘轴13的带动下按着顺时针转动,此时内滑块7和外滑块8分别在第一直线滑块23和第二直线滑块16带动下向靠近下圆盘15中心的方向移动,由于内滑块7和外滑块8的相对水平距离不变,所以伸缩杆5的高度不发生变化,但由于内滑块7带动伸缩往5里移动,使得伸缩杆5收缩,捕获空间的直径变小,收缩到恰好容纳目标样品19的捕获空间。
47.s3、捕获装置收缩:在导帘的收缩过程中,与顶部导帘4连接的防逃逸限位组件中的顶部限位板10在顶部限位销11的导向作用下,逐渐将捕获空间的顶部密封,防止目标样品19的逃逸。
48.s4、捕获装置对目标样品19的回收:如图7d所示,在防逃逸限位组件将目标样品19完全封闭后,启动与上圆盘14连接的第二驱动电机,使上圆盘14在齿轮轴与自身齿的啮合下逆时针转动,此时外滑块8在第二直线滑块16的带动下向远离上圆盘14中心的方向移动,内滑块7固定不动,由于与外滑块8连接的连杆9的长度不会发生变化,此时伸缩杆5在连杆9的带动下,其高度逐渐缩小,使得捕获空间高度降低,在防逃逸限位组件中顶部限位板10的作用下,将目标样品19压入样品舱中,从而完成整个捕获。
49.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。