1.本技术涉及飞行器技术领域,尤其是涉及一种航拍无人机。
背景技术:
2.无人机为无人驾驶的飞行器,其可以利用无线电遥控设备和自备程序进行操控。与载人飞行器相比,无人机适用于完成条件恶劣、危险等环境下的任务。无人机根据应用领域可以分为军用无人机和民用无人机。
3.无论是军用无人机还是民用无人机,其均可以用于摄影拍照,即在无人机上设置可控的摄像设备,从而构成航拍无人机。为保持航拍无人机的平稳性,摄像设备通常设在无人机的机体靠近地面的一侧,以使得航拍无人机的重心下移。同时,为满足不同的摄影摄像需要,摄像设备通常与无人机的机体拆卸连接,以便于更换不同的摄像设备。
4.针对上述中的相关技术,发明人认为更换摄像设备后,若摄像设备的尺寸较大且超过无人机的起落架的高度,易致使无人机无法平稳地放置于地面上,不利用无人机的起落。
技术实现要素:
5.为了使得起落架可以适配于不同尺寸的摄像设备,本技术提供一种航拍无人机。
6.本技术提供的一种航拍无人机采用如下的技术方案:
7.一种航拍无人机,包括机体、摄像设备和起落架,所述摄像设备和起落架均设在机体靠近地面的一侧,所述摄像设备与机体可拆卸连接,所述起落架包括对称设置在机体两侧的支架单元,所述支架单元的一端转动设置在机体上,且两个支架单元沿相互靠近或者相互远离的方向转动,所述支架单元上设有对支架单元的转动进行限位的限位机构,所述支架单元的另一端沿靠近地面的方向延伸,所述摄像设备设在两个支架单元之间。
8.通过采用上述技术方案,机体用作控制主体和供能主体,摄像设备用于满足航拍无人摄影摄像的需要。通过转动支架单元,使两个支架单元相互靠近或者相互远离,以使得支架单元的高度发生变化,从而使得支架单元适配与不同尺寸的摄像设备。
9.可选的,所述支架单元包括相互垂直的支撑臂和抵接杆,所述支撑臂的一端转动设置在机体上,支撑臂的另一端固定在抵接杆的中部,所述抵接杆水平设置。
10.通过采用上述技术方案,抵接杆与地面相抵接,以使得支架单元在地面保持稳固;支撑臂用于对机体形成支撑,以使得机体和摄像设备保持悬空。
11.可选的,所述机体靠近支架单元的两侧均设有铰接座,所述支撑臂靠近机体的一端设有铰接轴,所述铰接轴转动设置在铰接座上,所述铰接轴两端伸出铰接座外,所述限位机构包括螺纹连接在铰接轴两端的锁止帽。
12.通过采用上述技术方案,驱使支撑臂绕铰接轴转动,即可使得支架单元在机体上发生转动;拧动锁止帽,使锁止帽的端部与铰接座相抵接,即可将支撑臂锁紧固定在机体上,从而使得支架单元的高度调节后不易改变。
13.可选的,所述锁止帽的外侧壁上设有防滑纹。
14.通过采用上述技术方案,防滑纹用于增大使用者手部与锁止帽之间的摩擦阻力,从而使得使用者可以更为简便省力地驱使锁止帽转动。
15.可选的,所述抵接杆的两端均套设且固定有减震软套。
16.通过采用上述技术方案,减震软套受压变形,可以对抵接杆形成缓冲和减震,以使得机体的起落更加平稳。
17.可选的,所述抵接杆包括套管和内杆,所述内杆滑移设置在套管的两端,所述内杆与套管过盈配合,所述抵接杆固定在套管的中部,所述减震软套设在内杆远离套管的一端,所述减震软套的外径大于套管的外径。
18.通过采用上述技术方案,通过调节内杆在套管上的位置,可以对抵接杆的长度进行调节,从而使得支架单元在地面上的稳固性更佳。
19.可选的,所述内杆远离套管的一端设有两道间隔设置的限位环沿,所述减震软套设在两道限位环沿之间。
20.通过采用上述技术方案,限位环沿对减震软套进行限位,以使得减震软套不易产生窜动。
21.可选的,所述支架单元和机体之间均设有拉簧。
22.通过采用上述技术方案,拉簧对支撑臂起到拉撑效果,以使得支撑臂不易沿相互远离的方向转动,从而使得摄像设备不易与地面相抵接。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过转动支架单元,使两个支架单元相互靠近或者相互远离,以使得支架单元的高度发生变化,从而使得支架单元适配与不同尺寸的摄像设备;
25.2.通过设置减震软套,减震软套受压变形,可以对抵接杆形成缓冲和减震,以使得机体的起落更加平稳。
附图说明
26.图1是本技术实施例航拍无人机整体的结构示意图;
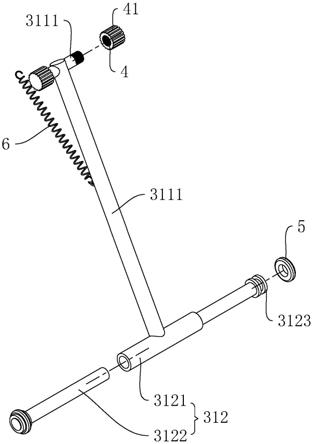
27.图2是本技术实施例中支架单元的爆炸图。
28.附图标记说明:1、机体;11、铰接座;2、摄像设备;3、起落架;31、支架单元;311、支撑臂;3111、铰接轴;312、抵接杆;3121、套管;3122、内杆;3123、限位环沿;4、锁止帽;41、防滑纹;5、减震软套;6、拉簧。
具体实施方式
29.以下结合附图1-2对本技术作进一步详细说明。
30.本技术实施例公开一种航拍无人机。参照图1,航拍无人机包括机体1、摄像设备2和起落架3。
31.机体1用作控制主体和供能主体,在满足航拍无人机飞行功能的前提下,对航拍无人机的航向、航速、起落等进行控制。摄像设备2和起落架3均设在机体1靠近地面的一侧,起落架3用于对机体1形成支撑,以便于机体1的起落;摄像设备2可拆卸设置在机体1上,可拆卸的方式包括有卡接、螺栓等螺接件连接等。摄像设备2用于满足航拍无人摄影摄像的需
要。
32.参照图1和图2,起落架3包括两个相同的支架单元31。支架单元31对称设置在机体1的两侧,机体1靠近支架单元31的两侧均固定有铰接座11。支架单元31包括支撑臂311和抵接杆312,其中支撑臂311的一端转动设置在机体1上,支撑臂311靠近机体1的一端固定有铰接轴3111,铰接轴3111转动设置在铰接座11上,且铰接轴3111的两端伸出铰接座11外。支撑臂311在机体1上转动时,两个支架单元31相互靠近或者相互远离,以实现支架单元31高度的调节,从而使得支架单元31适配于不同尺寸的摄像设备2。
33.支架单元31上设有对支撑臂311的转动进行限位的限位机构。限位机构包括锁止帽4,锁止帽4可以设置为与铰接轴3111同轴的圆柱体。锁止帽4设在铰接轴3111的两端,且锁止帽4与铰接轴3111螺纹连接。顺向拧动锁止帽4,使锁止帽4的端部与铰接座11的外侧壁相抵接,即可将支撑臂311锁紧固定在铰接座11上;反向拧动锁止帽4,使锁止帽4远离铰接座11,即可驱使支撑臂311转动。
34.为便于驱使锁止帽4转动,锁止帽4的侧壁上设有防滑纹41。防滑纹41沿铰接轴3111的轴向进行设置,且防滑纹41沿铰接轴3111的周向均布在锁止帽4的侧壁上。防滑纹41用于增大使用者手部与锁止帽4之间的摩擦阻力,从而使得使用者可以更为简便省力地驱使锁止帽4转动。
35.参照图1和图2,抵接杆312与支撑臂311相互垂直,且抵接杆312水平设置,抵接杆312用于与地面抵接,以使得支架单元31可以对机体1形成支撑。抵接杆312包括套管3121和内杆3122,套管3121与抵接杆312固定连接,且抵接杆312设在套管3121的中部。内杆3122滑移设置在套管3121内,且内杆3122与套管3121过盈配合,以使得内杆3122滑移后不易发生在套管3121上随意窜动。
36.同时内杆3122和套管3121可以形成轴向的限位,例如内杆3122伸入套管3121的一端设有扩口段,套管3121靠近内杆3122的设有收口段,以避免内杆3122与套管3121分离。通过调节内杆3122在套管3121上的位置,可以对抵接杆312的长度进行调节。
37.参照图2,内杆3122远离套管3121的一端设有限位环沿3123。限位环沿3123由内杆3122的侧壁沿远离内杆3122轴线的方向凸起所形成,限位环沿3123间隔设置有两道。两道限位环沿3123之间设有减震软套5,限位环沿3123对减震软套5进行限位,以使得减震软套5不易产生窜动。
38.减震软套5可以设置为圆管状,且减震软套5可以采用海绵制成。减震软套5的外径大于套管3121的外径,且减震软套5套设在内杆3122上。抵接杆312与地面相抵接时,减震软套5受压变形,不仅增大了抵接杆312与地面之间的接触面积,并且还可以对抵接杆312形成缓冲和减震,以使得机体1的起落更加平稳。
39.参照图1和图2,支撑臂311和机体1之间设有拉簧6。拉簧6的一端固定在机体1靠近地面的一侧,拉撑的另一端固定在支撑臂311靠近支架单元31对称轴线的一侧。当抵接杆312与地面相抵接时,支架单元31受力且具有沿相互远离的方向转动的趋势,且机体1和摄像设备2的重量越大,转动趋势越为明显;此时拉簧6在机体1和支撑臂311之间起到对拉作用,可以减小支撑臂311的转动趋势,从而使得机体1保持平稳。
40.本技术实施例一种航拍无人机的实施原理为:具体使用时,将所需的摄像设备2固定在机体1上。若摄像设备2的尺寸较大,先反向转动锁止帽4,使锁止帽4远离铰接座11,然
后驱使支撑臂311绕铰接轴3111转动,以使得两个支架单元31相互靠近。转动时,支架单元31的高度具有逐渐增大的过程,以使得摄像设备2不易伸出支架单元31外,从而使得支架单元31将机体1和摄像设备2均架空。当支架单元31保持竖直时,支架单元31的高度最高。支撑臂311转动设合适的位置后,顺向拧动锁止帽4,并使锁止帽4的端部与铰接座11的外侧壁相抵接,即可将支撑臂311锁止固定。
41.机体1飞行至合适的位置降落时,套管3121与地面相抵接,且减震软套5在地面的挤压下变形,对抵接杆312形成缓冲,以使得机体1和摄像设备2不易晃动。同时,拉簧6对支撑臂311起到拉撑效果,以使得支撑臂311不易沿相互远离的方向转动,从而使得摄像设备2不易与地面相抵接。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。