1.本实用新型涉及无人机技术领域,尤其涉及一种航测无人机摄像机悬挂固定装置。
背景技术:
2.无人机航测,是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广等特点,在小区域和飞行困难地区高分辨率影响快速获取方面具有明显优势,基于无人机平台的数字航摄是航空遥感领域的一个崭新发展方向,无人机航拍可广泛引用于国家重大工程建设、灾害应急处理、国土监察、资源开发等方面。现有航测无人机为降低无人机飞行过程中对摄像机的干扰多将摄像机悬挂于机身下,但由于固定不牢靠易发生倾斜导致画面不清晰或不完整。
技术实现要素:
3.为解决以上技术问题,本实用新型提供一种航测无人机摄像机悬挂固定装置,包括:一种航测无人机摄像机悬挂固定装置,包括:与航测无人机底部焊接连接的连接架,其特征在于,还包括:
4.固定限位机构,用以固定限位摄像机,所述固定限位机构包括第一限位组件和第二限位组件;
5.调平机构,用以调节摄像机底部支撑平衡,包括平衡探测组件和平衡调节组件;
6.辅助测平组件,用以在安装过程中辅助检测水平度。
7.作为优选的,所述第一限位组件包括顶端通过伸缩臂与所述连接架内壁固定连接的真空吸盘,所述真空吸盘与外部真空泵管路连接。
8.作为优选的,所述真空泵与航测无人机内控制器的输出端电路连接。
9.作为优选的,所述第二限位组件包括固定设置于连接架内壁的气囊,所述气囊与气泵管路连接。
10.作为优选的,所述气泵设置在所述连接架的外壁上,且与航测无人机内部控制器的输出端连接。
11.作为优选的,所述平衡探测组件包括若干个倾角传感器,所述平衡调节组件包括固定于所述连接架内壁底面上的伸缩杆、伸缩杆上端的承接板;所述倾角传感器设置于承接板上。
12.作为优选的,所述倾角传感器与航测无人机内部的控制器的输入端电路连接,控制器的输出端与伸缩杆电路连接。
13.作为优选的,还包括设置在所述承接板下方的弹性缓冲机构,包括内置阻尼弹簧组的弹性软垫和设置于弹性软垫上的海绵垫。
14.作为优选的,所述连接架的左右两侧均开设有散热口。
15.综上所述,本实用新型提供的一种航测无人机摄像机悬挂固定装置,包括:与航测
无人机底部焊接连接的连接架,其特征在于,还包括:固定限位机构,用以固定限位摄像机,所述固定限位机构包括第一限位组件和第二限位组件;调平机构,用以调节摄像机底部支撑平衡,包括平衡探测组件和平衡调节组件;辅助测平组件,用以在安装过程中辅助检测水平度。通过固定限位机构双向或多向固定限位,使摄像机安装牢固、不易掉落;且通过调平机构在航测无人机内控制器的控制下通过平衡探测组件和平衡调节组件的协同作用时时调节其水平度,并辅以弹性缓冲机构缓冲化解抖动力,增加航测无人机的防抖性能,保证拍摄画面的完整性。
附图说明
16.为了更清楚的说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
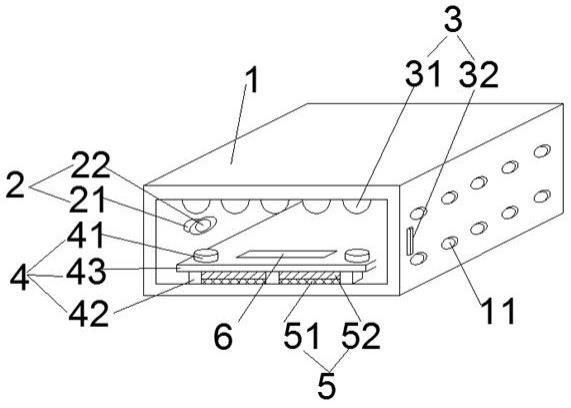
17.图1为本实用新型与航测无人机连接结构示意图;
18.图2为本实用新型固定限位组件为情况a时的结构示意图;
19.图3为本实用新型固定限位组件为情况a时的结构示意图。
20.附图标记说明如下:
21.连接架1、第一限位组件2、第二限位组件3、调平机构4、水平气泡6、弹性缓冲机构5、散热孔11、伸缩臂21、真空吸盘22、气囊31、气泵32、倾角传感器41、伸缩杆42、承接板43、弹性软垫51、海绵垫52。
22.具体实施方式:
23.实施例1
24.如图1、2所示,一种航测无人机摄像机悬挂固定装置,包括:连接架1,与航测无人机底部焊接连接,用于装载、限位摄像机;优选的,连接架1的左、右侧面均开设有散热孔11;
25.固定限位机构2,用以固定限位摄像机,包括用第一限位组件2和用以第二限位组件3,优选的,第一限位组件2包括伸缩臂21、真空吸盘22,伸缩臂21的一端与所述连接架1的内壁焊接连接,所述伸缩臂21的另一端固定安装有真空吸盘22,优选的,真空吸盘22与真空泵管路连接;优选的,真空泵与航测无人机内部控制器电路连接;优选的,第二限位组件3包括设置于连接架1内壁的气囊31,与设置在连接架1外部的气泵32管路连接,优选的,气泵32与控制器的输出端连接;
26.调平机构4,用以调节摄像机底部的支撑平衡,包括由若干个倾角传感器41组成的平衡探测组件和平衡调节组件;平衡调节组件包括若干个伸缩杆42和承接板43;倾角传感器41设置在承接板43上;优选的,倾角传感器41与控制器的输入端连接,控制器的输出端与伸缩杆42连接;
27.辅助测平组件,用以在安装过程中辅助检测水平度,包括内嵌于承接板43上的水平气泡6。
28.优选的,还包括弹性缓冲机构5,设置在承接板43的下方,包括内置阻尼弹簧组的弹性软垫51和设置于弹性软垫51上的海绵垫52。
29.实施例2
30.第一限位组件2和第二限位组件3分别设置在连接架1的内壁,分为以下几种情况:
31.情况a:如图3所示,第一限位组件2内伸缩臂21的一端与连接架1内壁的顶部固定连接,伸缩臂21的另一端即底端与真空吸盘22连接;第二限位组件3内的气囊31设置于连接架1内部侧壁上;
32.在起飞前需要将摄像机安装,将摄像机推动至与航测无人机底壁焊接连接的连接架1内,伸缩臂21向下伸展,当真空吸盘22接触到摄像机的顶部,控制器启动真空泵将空气排空,完成竖直方向的限位固定,实现第一限位组件竖直方向限位固定;经控制器启动气泵32对连接架1内左右两侧设置的气囊31充气,实现第二限位组件水平方向限位固定;
33.情况b:如图2所示,第一限位组件2内伸缩臂21的一端固定于所述连接架1内部的侧壁上,另一端与真空吸盘22连接;第二限位组件3气囊31设置在连接架1内部顶壁上,通过第一限位组件2水平限位固定、第二限位组件3竖直方向限位固定摄像机;
34.在起飞前需要将摄像机安装,将摄像机推动至与航测无人机底壁焊接连接的连接架1内,伸缩臂21向连接架1中心方向伸展,当真空吸盘22接触到摄像机的侧壁时,控制器启动真空泵将空气排空,完成水平方向的限位固定,实现第一限位组件2水平方向限位固定;经控制器启动气泵32对连接架1内壁顶部设置的气囊31充气,实现第二限位组件3竖直方向限位固定。
35.实施例3
36.在限位固定摄像机后观察承接板43上内嵌的水平气泡6,当水平气泡6中的气泡处于最中间时表示摄像机的底壁水平,若气泡不在中间,表示承接板43有倾角,此时平衡探测组件内的倾角传感器41通过控制器启动平衡调节组件内的伸缩杆42开始工作,通过不同伸缩杆42伸缩调整承接板43至平衡状态,控制器将调平后的角度设定为预设值,后准备工作完成。
37.在航测过程中,因外界环境影响,无人机易出现抖动,在此状况下,倾角传感器41时时探测倾角与预设值是否相同,并通过控制器调节伸缩杆42调平;在平焊探测组件、控制器和平衡调节组件的协同作用下,调节承接板43至平衡状态,且承接板43下方的弹性缓冲机构5通过阻尼弹簧组51的弹性回复力和海绵垫52的缓冲、化解抖动力,提高工作过程中防抖能力,保证拍摄画面完整、清晰。
38.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。