1.本发明涉及一种紧固系统,该紧固系统尤其适用于将构件、尤其顶部面板装配在飞行器中。本发明还涉及一种配备有这种紧固系统的构件组件。最后,本发明涉及一种配备有这种紧固系统和/或这种构件组件的飞行器。
背景技术:
2.在现代交通飞行器中,在舱室的顶部区域中、在向上限定舱室的乘客区域的顶部面板后面通常铺设有大量管线,例如电气管线以及飞行器空调设备的管线。此外,舱室的位于顶部面板后面的区域被用作各种部件、尤其电子部件的安装空间。为了使这些管线和部件可触及以用于维修或维护工作,必须将顶部面板从其在飞行器的正常操作中占据的装配位置移除。此外,部件本身也可以整合到顶部面板中,这些部件的维修或维护需要拆卸顶部面板。根据顶部面板在飞行器舱室中的布置,顶部面板的拆卸可能因为与顶部面板相邻的安装件(例如方形体)而变得困难。
3.发明任务
4.本发明基于的目的在于,提供一种紧固系统,该紧固系统适用于装配构件、尤其顶部面板,使得构件可以在需要时易于拆卸,以使位于构件后方的空间易于触及以用于例如维修工作或维护工作。此外,本发明目的是给出一种配备有这种紧固系统的构件组件以及一种配备有这种紧固系统和/或这种构件组件的飞行器。
5.该目的通过具有权利要求1所述特征的紧固系统、具有权利要求14所述特征的构件组件、以及具有权利要求15所述特征的飞行器来实现。
6.一种紧固系统包括结构保持元件,该结构保持元件能够紧固在结构构件上。此外,紧固系统包括构件保持元件,该构件保持元件可以紧固在要紧固的构件上。例如,结构保持元件可以被设置成用于紧固在结构构件上,该结构构件可以被设计为飞行器的主结构构件形式或以传递负载的方式与飞行器的主结构连接的结构构件形式。相比之下,构件保持元件可以被设置成用于紧固在例如被设计为呈飞行器内饰构件、尤其顶部面板形式的构件上。构件保持元件可以相对于结构保持元件在第一操作位置与第二操作位置之间运动。
7.当构件保持元件相对于结构保持元件布置在其第一操作位置时,与构件保持元件连接的构件优选地处于正常操作位置。当与构件保持元件连接的构件是飞行器顶部面板时,构件可以在其正常操作位置中以常见的方式布置在飞行器舱室的顶部区域中,并且将位于构件与飞行器外蒙皮之间的部件安装空间与飞行器舱室的乘客区域分开。相反,当构件保持元件相对于结构保持元件布置在其第二操作位置时,与构件保持元件连接的构件可以处于可触及操作位置。被设计为飞行器顶部面板形式的构件在其可触及位置优选地释放从飞行器舱室的乘客区域到位于构件与飞行器外蒙皮之间的部件安装空间的入口。由此可以实现针对安装在部件安装空间中的部件的维修和维护工作。
8.紧固系统包括第一杆元件,该第一杆元件以可围绕第一旋转轴(drehachse)旋转的方式与结构保持元件连接。此外,第一杆元件以可围绕第二旋转轴旋转的方式与构件保
持元件连接。尤其,第一杆元件可以在第一端部的区域中以可围绕第一旋转轴旋转的方式与结构保持元件连接。相比之下,在与第一端部相反的第二端部的区域中,第一杆元件优选地以可围绕第二旋转轴旋转的方式与构件保持元件连接。在构件保持元件从其第一操作位置转移到其第二操作位置时,第一杆元件优选地既围绕第一旋转轴相对于结构保持元件旋转,也围绕第二旋转轴相对于构件保持元件旋转。
9.最后,紧固系统包括连接元件,与第一杆元件相同地,该连接元件既与构件保持元件连接,也与结构保持元件连接。连接元件以可围绕第三旋转轴旋转的方式与构件保持元件连接。优选地,在构件保持元件从其第一操作位置转移到其第二操作位置时,连接元件实施围绕第三旋转轴的旋转。第一旋转轴、第二旋转轴和第三旋转轴可以大体上彼此平行地延伸。
10.相比之下,连接元件以可相对于结构保持元件平移移位的方式与结构保持元件连接,使得在构件保持元件从其第一操作位置转移到其第二操作位置时,第二旋转轴在垂直于第二旋转轴延伸的平面中移位。相对应地,在构件保持元件从其第一操作位置转移到其第二操作位置时,与构件保持元件连接并且借助于紧固系统装配在飞行器的顶部区域中的结构构件上的构件同样可以在垂直于第二旋转轴延伸的平面中移位,并且同时围绕第二旋转轴相对于结构保持元件旋转或枢转。因此,即使邻近于构件安装的元件(例如方形体等)限制了构件从其正常操作位置转移到其可触及位置的运动自由空间并且例如会妨碍构件围绕紧固系统的第二旋转轴的纯枢转运动,构件也可以以简单并且舒适的方式方法从其正常操作位置转移至其可触及位置。
11.连接元件可以以能够相对于结构保持元件平移移位的方式与结构保持元件连接,使得在构件保持元件从其第一操作位置转移到其第二操作位置时,第二旋转轴在该平面中沿圆弧形的运动轨迹运动。于是,在构件保持元件从其第一操作位置转移到其第二操作位置时,与构件保持元件连接并且借助于紧固系统装配在飞行器的顶部区域中的结构构件上的构件的区段同样可以沿圆弧形的运动轨迹相对于结构保持元件运动。同时,构件可以围绕第二旋转轴相对于结构保持元件旋转或枢转。
12.此外,连接元件可以以能够相对于结构保持元件平移移位的方式与结构保持元件连接,使得在构件保持元件从其第一操作位置转移到其第二操作位置时,第一旋转轴与第二旋转轴之间的在与第二旋转轴垂直的第一方向上的第一间距减小,并且第一旋转轴与第二旋转轴之间的在与第二旋转轴和第一方向垂直的第二方向上的第二间距增加。换言之,在构件保持元件从其第一操作位置转移到其第二操作位置时,连接元件可以相对于结构保持元件实施平移运动,通过该平移运动使得构件保持元件的与连接元件连接的区域远离结构保持元件。由此,第一旋转轴与第二旋转轴之间的在与第二旋转轴垂直的第一方向上的第一间距增加。
13.同时,第一杆元件围绕第一旋转轴的旋转运动和第一杆元件围绕第二旋转轴的旋转运动使得第二旋转轴在与第二旋转轴和第一方向垂直的第二方向上接近第一旋转轴。相对应地,在构件保持元件从其第一操作位置转移到其第二操作位置时,与构件保持元件连接并且借助于紧固系统装配在飞行器的顶部区域中的结构构件上的构件在其围绕第二旋转轴旋转的同时,可以在第二方向上远离结构构件(向下)运动并且在第一方向上(向前)朝向第一旋转轴运动。
14.连接元件优选地以可相对于结构保持元件平移移位的方式与结构保持元件连接,使得在构件保持元件从其第一操作位置转移时,连接元件相对于结构保持元件移位所沿的平移运动轨迹与第一旋转轴的延长线相交。这可以实现紧固系统的紧凑设计。
15.结构保持元件可以包括基本元件。此外,结构保持元件可以包括第二杆元件。第一杆元件可以以可围绕第一旋转轴旋转的方式与第二杆元件连接,即第一杆元件可以藉由第二杆元件以可围绕第一旋转轴旋转的方式与结构保持元件连接。优选地,在构件保持元件从其第一操作位置转移到其第二操作位置时,第一杆元件与第二杆元件之间限定的角度增加。例如,当构件保持元件处于其第一操作位置时,第一杆元件与第二杆元件之间限定的角度可以介于50
°
与70
°
之间,尤其为大约60
°
。相比之下,当构件保持元件处于其第二操作位置时,第一杆元件与第二杆元件之间限定的角度可以介于100
°
与120
°
之间,尤其为大约110
°
。然而,在构件保持元件的第一操作位置和第二操作位置中,第一杆元件与第二杆元件之间限定的角度是设计参数,这些设计参数可以根据情况(例如要与构件保持元件连接的构件的尺寸以及构件保持元件相对于结构保持元件的期望的运动范围)来进行适配。
16.第二杆元件可以与基本元件刚性地连接。替代于此,第二杆元件也可以被实施为与基本元件整合。例如,第二杆元件可以包括两个臂,这些臂可以在其背离基本元件的自由端部的区域中通过第一旋转轴相互连接。
17.基本元件可以包括与第二杆元件连接的第一区段。此外,基本元件可以包括大体上垂直于第一区段延伸的第二区段。第二杆元件例如可以从基本元件的第一区段的第一表面(其朝向基本元件的第二区段)延伸。基本元件的第一区段可以进一步具有与其第一表面相反的第二表面,该第二表面优选地大体上平行于第一表面延伸。基本元件的第二区段同样可以具有与其第一表面相反的第二表面。当结构保持元件紧固在结构构件上时,基本元件的第二区段的第二表面可以贴靠结构构件,而基本元件的第一表面背离结构构件并且朝向基本元件的第一区段。基本元件的第二区段的第一表面和第二表面优选地大体上彼此平行地延伸。
18.优选地,连接元件的至少一个区段以能够移位的方式接收在形成在结构保持元件上的导轨中。导轨可以包括至少一个凹槽,该凹槽与设置在连接元件上的突起共同作用,以便引导连接元件相对于结构保持元件的运动。额外地或替代于此,也可以在导轨上设置至少一个突起,该突起与形成在连接元件上的凹槽共同作用,以便引导连接元件相对于结构保持元件的运动。
19.优选地,导轨安装在基本元件的第二区段上,并且尤其安装在结构保持元件的基本元件的第二区段的第一表面上。为了引导连接元件相对于结构保持元件的平移运动,使得在构件保持元件从其第一操作位置转移到其第二操作位置时第二旋转轴在与第二旋转轴垂直的平面中移位,导轨优选同样在与第二旋转轴垂直的平面中延伸。尤其,在连接元件以可相对于结构保持元件平移移位的方式与结构保持元件连接,使得在构件保持元件从其第一操作位置转移时连接元件相对于结构保持元件移位所沿的平移运动轨迹与第一旋转轴的延长线相交时,导轨也优选地与第一旋转轴的延长线相交。
20.构件保持元件优选地包括底板,该底板可以具有第一表面以及与第一表面相反的第二表面。当构件保持元件紧固在构件上时,底板的第二表面可以贴靠构件,而底板的第一表面背离构件。底板的第一表面和第二表面优选地大体上彼此平行地延伸。
21.此外,构件保持元件可以包括与第一杆元件连接的第一接收装置。当构件保持元件紧固在构件上时,第一接收装置优选地从构件保持元件的底板的背离构件的第一表面延伸。最后,构件保持元件可以包括与连接元件连接的第二接收装置,该第二接收装置可以以与第一接收装置类似的方式从构件保持元件的底板的第一表面延伸。
22.优选地,在构件保持元件从其第一操作位置转移到其第二操作位置时,第一杆元件与构件保持元件的底板构成的角度增加。例如,在构件保持元件从其第一操作位置转移到其第二操作位置时,第一杆元件与构件保持元件的底板构成的角度可以从大约30
°
增加到大约65
°
。相比之下,构件保持元件从其第一操作位置转移到其第二操作位置优选地实现连接元件与构件保持元件的底板构成的角度减小。例如,连接元件与构件保持元件的底板构成的角度可以从大约80
°
减小到大约25
°
。然而,在构件保持元件的第一操作位置和第二操作位置中,在第一杆元件或连接元件与构件保持元件的底板之间限定的角度是设计参数,这些设计参数可以根据情况(例如要与构件保持元件连接的构件的尺寸以及构件保持元件相对于结构保持元件的期望的运动范围)来进行适配。
23.第一接收装置优选地包括两个大体上彼此平行延伸的臂。在第一接收装置的臂的背离构件保持元件的底板的自由端部的区域中,第一接收装置的臂优选地通过第二旋转轴相互连接。相比之下,第二接收装置可以仅包括一个臂,该臂在其背离构件保持元件的底板的自由端部的区域中与连接元件连接。
24.优选地,紧固系统进一步包括锁定系统,该锁定系统被适配成将构件以能够松脱的方式锁定在其正常操作位置。在紧固系统的优选的实施方式中,紧固系统或至少一个紧固系统被适配成将构件在构件的第一边缘区段的区域中与结构构件。根据尺寸,即构件的第一边缘区段的长度,可以沿构件的第一边缘区段设置多个紧固系统。于是,锁定系统优选地被适配成将构件在构件的与构件的第一边缘区段相反的第二边缘区段的区域中以可松脱的方式锁定在其正常操作位置。
25.锁定系统包括第一锁定元件,该第一锁定元件可以在构件的第二边缘区段的区域中与构件连接。此外,锁定系统可以包括与第一锁定元件互补的第二锁定元件,该第二锁定元件可以安装在结构部件上。结构部件可以是飞行器的主结构的部件,然而也可以是以传递负载的方式与飞行器的主结构连接的部件。根据尺寸,即构件的第二边缘区段的长度,可以沿构件的第二边缘区段设置多个锁定系统。
26.锁定系统的解锁实现了构件的松脱,即构件的第二边缘区段从结构部件上的松脱。由此,构件的第二边缘区段可以相对于结构部件枢转。当构件是顶部面板时,构件在锁定系统松脱时相对于结构部件向下枢转。然而,在构件的第一边缘区段的区域中,构件通过紧固系统固定在结构构件上。然而,以如下方式激活紧固系统的运动,使得紧固系统的构件保持元件从其第一操作位置转移到其第二操作位置。由此,构件如上所述在其围绕第二旋转轴旋转的同时,也在第二方向上远离结构构件(向下)运动并且在第一方向上(向前)朝向第一旋转轴从其正常操作位置朝向其可触及位置运动。
27.紧固系统可以进一步包括具有第一端部和第二端部的保持带。保持带的第一端部可以是与构件可连接的。相反,保持带的第二端部可以是与结构部件可连接的。结构部件可以是相同的结构部件,锁定系统的第二锁定元件也可以与该结构部件连接。然而替代于此,保持带的第二端部也可以是能够安装在其他结构部件上的。保持带优选地被适配成在构件
从其正常操作位置转移到其可触及位置时,限定构件相对于结构构件的运动。
28.尤其,保持带可以在构件的第二边缘区段的区域中与构件连接,该第二边缘区段与构件的与紧固系统的构件保持元件可连接的第一边缘区段相对。于是,当构件在锁定系统解锁后从其正常操作位置运动到其可触及位置时,保持带可以以简单的方式方法限制构件相对于结构构件实施的翻转或枢转运动。优选地,保持带被设计为可伸展的保持带形式。尤其,保持带还被设计为具有自动收缩功能,当构件再次从其可触及位置返回其正常操作位置时,该自动收缩功能实现保持带的自动缩短。
29.一种构件组件包括构件和结构构件。构件借助于上述紧固系统以可以在正常操作位置与可触及位置之间运动的方式紧固在结构构件上。尤其,通过紧固系统的构件保持元件从其第一操作位置到其第二操作位置的转移,可以使得借助于紧固系统紧固在结构构件上的构件从其正常操作位置运动到其可触及位置。构件例如可以是被设置成用于装配飞行器舱室的顶部面板。尤其,顶部面板可以被设置成用于安装在飞行器的舱门区域中。结构构件可以是飞行器的主结构的一部分或以传递负载的方式紧固在飞行器的主结构上的结构构件。
30.优选地,紧固系统将构件在构件的第一边缘区段的区域中与结构构件连接。相比之下,紧固系统的锁定系统和/或保持带优选将构件在构件的与第一边缘区段相反的第二边缘区段的区域中与一个或多个结构部件连接。
31.一种飞行器包括上述紧固系统和/或上述构件组件。
附图说明
32.现在借助示意性的附图详细解释本发明的优选实施例,其中:
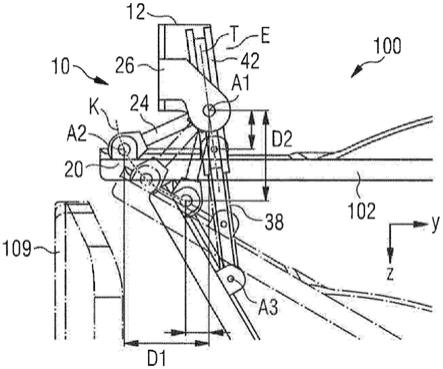
33.图1示出了具有被设计为飞行器顶部面板形式的构件的构件组件,该构件通过紧固系统紧固在结构构件上,其中紧固系统的构件保持元件处于第一操作位置,并且构件处于正常操作位置;
34.图2示出了根据图1的构件组件,然而其中紧固系统的构件保持元件处于第二操作位置,并且构件处于可触及位置;
35.图3示出了紧固系统的构件保持元件从其第一操作位置到其第二操作位置的转移;
36.图4示出了构件从其正常操作位置到其可触及位置的转移;
37.图5示出了根据图1的构件组件在飞行器中的安装环境;并且
38.图6示出了配备有根据图1的构件组件的飞行器。
具体实施方式
39.图1至图5各自示出了构件组件100,该构件组件包括构件102、结构构件104以及紧固系统10。在构件组件100中,紧固系统10用于将例如被设计为顶部面板形式的飞行器内饰构件102与结构构件104连接。结构构件104可以是配备有构件组件100的飞行器1000(参见图6)的主结构的部件。然而替代于此,结构构件104也可以是可以以传递负载的方式紧固在飞行器1000的主结构上的结构构件104。如最好可以从图5中看到,构件组件100安装在飞行器1000的舱门区域中,即安装在舱室顶板的与乘客舱门106相邻的区域中。在飞行器1000的
舱门区域中,还安装有机上厨房108、分隔壁109和卫生模块110,因此仅提供非常有限的装配空间来拆卸构件102以用于维修和/或维护目的。
40.紧固系统10包括结构保持元件12,该结构保持元件(如图3和图4所示)可以紧固在结构构件104上。结构保持元件12包括基本元件14,该基本元件具有第一区段16以及大体上垂直于第一区段16延伸的第二区段18。基本元件14的第一区段16包括朝向基本元件14的第二区段18的第一表面以及与其第一表面相反的第二表面,该第二表面优选地大体上平行于第一表面延伸。对应地,基本元件14的第二区段18包括朝向基本元件14的第一区段16的第一表面以及与其第一表面相反、并且大体上平行于第一表面延伸的第二表面。在构件组件100的装配状态下,即当结构保持元件12(如在图中所示)安装在结构构件104上时,基本元件14的第二区段18的第二表面贴靠在结构构件104上,而基本元件14的第一区段16大体上垂直于结构构件104延伸。
41.此外,紧固系统10包括构件保持元件20,该构件保持元件可以紧固在要紧固的构件102上。构件保持元件20包括底板22,该底板具有第一表面以及与第一表面相反、并且大体上平行于第一表面延伸的第二表面。当构件保持元件20(如图所示)紧固在构件102上时,底板22的第二表面贴靠构件,而底板22的第一表面背离构件102。
42.紧固系统10还包括第一杆元件24,该第一杆元件以可围绕第一旋转轴a1旋转的方式与结构保持元件12连接。此外,第一杆元件24以可围绕第二旋转轴a2旋转的方式与构件保持元件20连接。尤其,第一杆元件24在第一端部的区域中以可围绕第一旋转轴a1旋转的方式与结构保持元件12的第二杆元件26连接。相比之下,在与第一端部相反的第二端部的区域中,第一杆元件24以可围绕第二旋转轴a2旋转的方式与构件保持元件20的底板22连接。
43.结构保持元件12的第二杆元件26与结构保持元件12的基本元件14刚性连接,并且从基本元件14的第一区段16的第一表面(其朝向基本元件14的第二区段18)延伸。此外,第二杆元件26具有两个大体上彼此平行延伸的臂28、30,这些臂在其背离基本元件14的第一区段16的自由端部的区域中通过第一旋转轴a1相互连接。
44.为了将第一杆元件24紧固在构件保持元件20的底板22上,在底板22上设置有第一接收装置32,该第一接收装置从构件保持元件20的底板22的第一表面延伸。类似于第二杆元件26,第一接收装置32也具有两个大体上彼此平行延伸的臂34、36,这些臂在其背离底板22的自由端部的区域中通过第二旋转轴a2相互连接并且包围第一杆元件24的第二端部,以将第一杆元件24与构件保持元件20可靠地连接。
45.此外,紧固系统10包括连接元件38。与第一杆元件24相同,连接元件38既与构件保持元件20连接,也与结构保持元件12连接。尤其,连接元件38以可围绕第三旋转轴a3旋转的方式与构件保持元件20连接。为了将连接元件38与构件保持元件20连接,在构件保持元件20上设置有第二接收装置40,该第二接收装置从构件保持元件20的底板22的第一表面延伸。与第一接收装置32不同,第二接收装置40被设计为仅是单臂的,并且第三旋转轴a3穿过该第二接收装置。在紧固系统10的图中所示出的实施方式中,第一旋转轴、第二旋转轴和第三旋转轴a1、a2、a3大体上彼此平行地延伸。
46.相比之下,连接元件38与结构保持元件12连接,使得连接元件38可以相对于结构保持元件12以平移的方式在大体上垂直于第二旋转轴a2延伸的平面e中移位。为了能够实
现连接元件38相对于结构保持元件12的受到引导的平移移位,在结构保持元件12上设置有导轨42,连接元件38的至少一个区段接收在该导轨中。
47.导轨42在基本元件14的第二区段18、即基本元件14的第二区段18的第一表面上形成,并且由此在与第二旋转轴a2大体上垂直的平面e中延伸。此外,导轨42以如下方式紧固在基本元件14的第二区段18上,使得导轨与第一旋转轴a1的延长线相交。导轨42具有两个大体上彼此平行延伸的轨道元件。这些轨道元件中的一个轨道元件与基本元件14的第二区段18一体式地形成,而这些轨道元件中的另一个轨道元件与基本元件14的第二区段18分开形成并且安装在基本元件14的第二区段18的第一表面上。在这些轨道元件中的每个轨道元件中设置有凹槽,该凹槽与互补地设置在连接元件38上的突起共同作用。
48.如从图4最佳地可以看出,构件组件100的构件102借助于紧固系统10在构件102的第一边缘区段的区域中与结构构件104连接。如有需要,也可以沿构件102的第一边缘区段设置多个紧固系统10。
49.紧固系统10还包括在图4中仅示意性示出的锁定系统44,该锁定系统用于将构件102可松脱地锁定在与构件102的第一边缘区段相反的第二边缘区段的区域中。锁定系统44包括第一锁定元件,该第一锁定元件可以在构件102的第二边缘区段的区域中与构件102连接。此外,锁定系统包括与第一锁定元件互补的第二锁定元件,该第二锁定元件可以安装在结构部件45上。结构部件45可以是飞行器1000的主结构的部件,然而也可以是以传递负载的方式与飞行器1000的主结构连接的部件。如果需要,在组件100中也可以沿构件102的第二边缘区段设置多个锁定系统44。
50.最后,紧固系统10包括带有第一端部和第二端部的保持带46。保持带46的第一端部可以与构件102连接。尤其,保持带可以在构件102的第二边缘区段的区域中与构件102连接,该第二边缘区段与构件102的与紧固系统10的构件保持元件12可连接的第一边缘区段相反。相反,保持带46的第二端部可以与结构部件45连接。在紧固系统10的在图中示出的变体中,保持带46被实施为具有自动缩回功能的可伸展的保持带46的形式。
51.如从图1至图3中最佳地看出,构件保持元件20可以相对于结构保持元件12在第一操作位置(参见图1)与第二操作位置(参见图2)之间运动。当构件保持元件20相对于结构保持元件12布置在其第一操作位置时,构件组件100的与构件保持元件20连接的构件102处于正常操作位置,在该正常操作位置下,该构件将位于构件102与飞行器外蒙皮之间的部件安装空间与飞行器舱室的乘客区域分开。构件102随后借助于锁定系统44以可松脱的方式锁定在其正常操作位置。
52.相反,当构件保持元件20相对于结构保持元件12布置在其第二操作位置时,与构件保持元件20连接的构件102处于可触及操作位置。锁定系统44随后解锁,因此构件102的第二边缘区段从结构部件45上松脱。然而,构件102的受重力驱动的运动,即构件102的第二边缘区段相对于结构构件104和结构部件45向下的运动受到保持带46的限制。在构件102的可触及位置,构件释放从飞行器舱室的乘客区域到位于构件102与飞行器外蒙皮之间的部件安装空间的入口。由此可以实现针对安装在部件安装空间中的部件的维修和维护工作。如果需要,还可以松开保持带46,以便能够实现构件保持元件102的进一步的运动。
53.在将构件保持元件20从其第一操作位置转移到其第二操作位置时,第一杆元件24围绕第一旋转轴a1相对于结构保持元件12旋转或相对于结构元件12的第二杆元件26旋转。
在此,在紧固系统10的图中示出的实施方式中,第一杆元件和第二杆元件24、26之间限定的角度从大约60
°
增加到大约110
°
。同时,第一杆元件24围绕第二旋转轴a2相对于构件保持元件20旋转。在此,在紧固系统10的图中示出的实施方式中,第一杆元件24与构件保持元件20的底板22之间限定的角度从大约30
°
增加到大约65
°
。
54.在构件保持元件20从其第一操作位置转移到其第二操作位置时,连接元件38实施围绕第三旋转轴a3的旋转。在此,在紧固系统10的图中示出的实施方式中,连接元件38与构件保持元件20的底板22构成的角度从大约80
°
增加到大约25
°
。
55.此外,连接元件38受到导轨42的引导,沿运动轨迹t在与第二旋转轴a2垂直的平面e中相对于结构保持元件12平移地移位。由此,在构件保持元件20从其第一操作位置转移到其第二操作位置时,第二旋转轴a2也在垂直于第二旋转轴a2延伸的平面e中移位。与此相对应地,在构件保持元件20从其第一操作位置转移到其第二操作位置时,与构件保持元件20连接的构件102同样在垂直于第二旋转轴a2延伸的平面e中移位,并且同时围绕第二旋转轴a2相对于结构保持元件12旋转或枢转。
56.在图中示出的紧固系统10中,连接元件38以可相对于结构保持元件12平移移位的方式与结构保持元件12连接,使得在构件保持元件20从其第一操作位置转移到其第二操作位置时,第二旋转轴a2在平面e中沿圆弧形的运动轨迹k运动。相对应地,在构件保持元件20从其第一操作位置转移到其第二操作位置时,与构件保持元件20连接的构件102的第一边缘区段同样沿圆弧形的运动轨迹相对于结构保持元件12运动,并且同时围绕第二旋转轴a2相对于结构保持元件12旋转或枢转。
57.此外,连接元件38以可相对于结构保持元件12平移移位的方式与结构保持元件12连接,使得在构件保持元件20从其第一操作位置转移到其第二操作位置时,第一旋转轴与第二旋转轴a1、a2之间的在与第二旋转轴a2垂直的第一方向y上的第一间距d1减小,并且第一旋转轴与第二旋转轴a1、a2之间的在与第二旋转轴a2和第一方向y垂直的第二方向z上的第二间距d2增加。由此,构件保持元件20的与连接元件38连接的区域远离结构保持元件12。
58.同时,第一杆元件24围绕第一旋转轴a1的旋转运动和第一杆元件24围绕第二旋转轴a2的旋转运动使得第二旋转轴a2在与第二旋转轴a2和第一方向垂直的第二方向上接近第一旋转轴a1。相对应地,在构件保持元件20从其第一操作位置转移到其第二操作位置时,构件102在其围绕第二旋转轴a2旋转的同时,在第二方向z上远离结构构件104(向下)运动并且在第一方向y上(向前)朝向第一旋转轴a1运动。
59.最后,连接元件38以可相对于结构保持元件12平移移位的方式与结构保持元件12连接,使得在构件保持元件20从其第一操作位置转移时,连接元件38相对于结构保持元件12移位所沿的平移运动轨迹t与第一旋转轴a1的延长线相交。
60.如尤其从图4中可以明确,为了使构件102从其正常操作位置转移到其可触及位置,首先需要解锁锁定系统44。由此,构件102的第二边缘区段从结构部件45松脱,并且在重力驱动下向下枢转,其中构件102的第二边缘区段的运动受到保持带44的限制。同时激活紧固系统10的运动,使得紧固系统的构件保持元件20如上所述从其第一操作位置转移到其第二操作位置。
61.由此,构件102、即构件102的第一边缘区段如上所述在其围绕第二旋转轴a2旋转的同时,也在第二方向z上远离结构构件104(向下)运动并且在第一方向y上(向前)朝向第
一旋转轴a1从其正常操作位置朝向其可触及位置运动。因此,即使邻近于构件安装的元件108、110限制了构件102从其正常操作位置转移到其可触及位置的运动自由空间并且例如会妨碍构件102围绕紧固系统10的第二旋转轴a2的纯枢转运动,构件102也可以以简单并且舒适的方式方法从其正常操作位置转移至其可触及位置。