1.本发明涉及安全监察技术领域,尤其涉及一种数字化电力现场安全监察无人机。
背景技术:
2.授权公告号为cn 204650581 u的中国专利文件提供了一种电力现场安全质量监察系统,包括数据库服务器、安全管理终端、质量管理终端和智能手持终端,所述安全管理终端和质量管理终端通过网线与数据库服务器连接,数据库服务器通过远程无线通信网络与智能手持终端连接;电力作业现场划分为多个区域,每个区域安装有rfid电子标签,通过无线射频天线与智能手持终端的rfid读写模块连接。现有的电力现场安全质量监察工作多为人工操作,工作人员的工作量大,但监察范围有限,容易有监察死角,影响监察的效果,且监察效率不高。
技术实现要素:
3.针对背景技术中存在的问题,提出一种数字化电力现场安全监察无人机。本发明设置安全监察组件,监察的范围大,监察全面、高效,通过安全监察组件和控制模块配合,实现智能监察,保证了电力现场的安全性,减少了工作人员的工作量。
4.本发明提出一种数字化电力现场安全监察无人机,包括机体、安装座、安全监察组件和控制模块;安全监察组件包括安装罩、伸缩件、驱动件一、安装箱、安装监察件和驱动件二;安装罩通过安装座转动设置在机体上;伸缩件设置两组,两组伸缩件通过驱动件二传动,在安装罩的两侧同步转动;安装箱通过驱动件一传动,转动设置在两组伸缩件之间;安装监察件设置在安装箱上;控制模块设置在安装罩上,与安装监察件通讯连接。安装监察件包括电机一、丝杠、齿条、齿轮一、连接杆、转动盘、电机二、安装杆、电机三、连接杆和安装监察器;安装箱内设置安装室,侧壁设置开口;通过电机一传动的丝杠转动设置在安装室内;齿轮一通过与丝杠螺纹配合,实现沿安装室内壁水平移动;齿轮一转动设置在安装室内,一侧与齿条啮合,另一侧与连接杆的一端铰接;转动盘转动设置在开口上,一侧与连接杆的另一端铰接;安装杆设置在安装室外部,通过电机二转动设置在转动盘上;连接杆的一端通过电机三转动设置在安装杆上,另一端连接安装监察器。
5.优选的,安装罩内设置有隔板;隔板将安装罩分隔为密封室和开放室;驱动件二和控制模块设置在密闭室。
6.优选的,驱动件二包括电机四、齿轮二、传动轴和齿轮三;齿轮二键合连接电机四的主轴;传动轴设置两组,分别转动设置在安装罩的两侧,相对的一端分别键合连接齿轮三,另一端连接对应侧的伸缩件;齿轮二和齿轮三啮合连接。
7.优选的,伸缩件为电缸;驱动件一包括安装架和电机五;安装架设置在两组电缸的伸缩杆上,一组转动连接安装箱的一侧,另一组通过电机五转动连接安装箱的另一侧。
8.优选的,安装监察器设置多组,多组安装监察器与齿轮一一一对应,沿齿条等间距排列。
9.优选的,安装监察器上设置有图像采集单元、红外测温单元、超声波测距单元和数据传输单元。
10.优选的,开放室设置有收纳件;收纳件包括收纳筒和清洁座;收纳筒设置在隔板上;清洁座设置在收纳筒内,清洁端上设置有清洁刷。
11.优选的,安装箱上设置有警报器。
12.优选的,控制模块包括控制单元、数据处理单元、数据采集单元、定位单元、参数设置单元和数据存储单元。
13.优选的,安装座上设置有电动转盘,并在其外围设置安装孔;电动转盘连接安装箱。
14.本发明中一种数字化电力现场安全监察无人机,工作方法如下:
15.s1、机体飞行前,设置飞行路线,机体按照路线开始监察;
16.s2、监察过程中,安全监察组件工作,驱动件二通过电机四驱动,齿轮二和齿轮三传动,实现两组传动轴的同步转动,配合伸缩件的伸缩,同时驱动件一带动安装箱自转,安装箱在安装罩的外围移动,同时自转;
17.s3、电机一带动丝杠旋转,齿条水平移动,推动齿轮一转动,连接杆传动,转动盘同步转动,同时安装杆和连接杆在两个方向上旋转,安装监察器开始全方位监察;
18.s4、安装监察器中的图像采集单元、红外测温单元、超声波测距单元进行数据收集,将电力现场信息传输至数据采集单元,数据处理单元对数据汇总、分析、判断;
19.s5、发现异常情况时,将异常位置信息发送至后台,并通过警报器发出警报,提醒管理员注意;
20.s6、监察结束后,安装箱移动至开放室下方,安装监察器伸入收纳筒内,同时清洁座上的清洁刷配合安装监察器旋转,对其清洁。
21.与现有技术相比,本发明具有如下有益的技术效果:
22.本发明通过“航线规划—自主飞行—飞行监控—数据整理”的全流程管理模式,按设定路线开展精细化巡检作业,实现智能监察,保证了电力现场的安全性,减少了工作人员的工作量。设置安全监察组件,通过驱动件二、驱动件一和伸缩件配合,安装箱在安装罩的外围移动,同时自转,转动盘、安装杆和连接杆旋转,最终实现安装监察器的全方位监察,监察的范围大,保证了监察的全面性、高效性。设置收纳件对安装监察器进行收纳和清洁,提高了安装监察器的安全性,保证了监察视野的清晰。
附图说明
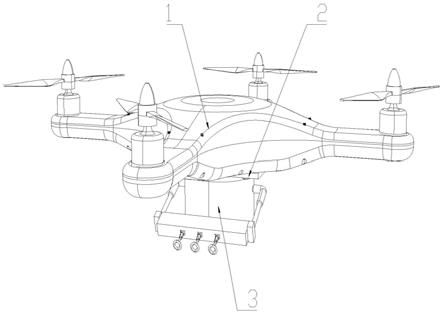
23.图1为本发明一种实施例的第一视角结构示意图;
24.图2为本发明一种实施例的第二视角结构示意图;
25.图3为本发明一种实施例中安全监察组件的结构示意图;
26.图4为本发明一种实施例中安装箱的内部结构示意图;
27.图5为图4中a处的放大图;
28.图6为发明一种实施例中安装监察器的结构示意图;
29.图7为本发明一种实施例中密封室的俯视图;
30.图8为本发明一种实施例中收纳件的结构图;
31.图9为本发明一种实施例中安装座的结构示意图。
32.附图标记:1、机体;2、安装座;3、安全监察组件;4、安装罩;5、隔板;6、伸缩件;7、驱动件一;8、安装箱;9、安装监察件;10、电机一;11、丝杠;12、齿条;13、齿轮一;14、开口;15、连接杆;16、转动盘;17、电机二;18、安装杆;19、电机三;20、连接杆;21、安装监察器;22、警报器;23、传动轴;24、电机四;25、齿轮二;26、齿轮三;27、数据处理单元;28、控制单元;29、电动转盘;30、安装孔;31、收纳筒;32、清洁座。
具体实施方式
33.实施例一
34.如图1-6所示,本发明提出的一种数字化电力现场安全监察无人机,包括机体1、安装座2、安全监察组件3和控制模块;安全监察组件3包括安装罩4、伸缩件6、驱动件一7、安装箱8、安装监察件9和驱动件二;安装罩4通过安装座2转动设置在机体1上;伸缩件6设置两组,两组伸缩件6通过驱动件二传动,在安装罩4的两侧同步转动;安装箱8通过驱动件一7传动,转动设置在两组伸缩件6之间;安装监察件9设置在安装箱8上;控制模块设置在安装罩4上,与安装监察件9通讯连接。安装箱8上设置有警报器22。
35.安装监察件9包括电机一10、丝杠11、齿条12、齿轮一13、连接杆15、转动盘16、电机二17、安装杆18、电机三19、连接杆20和安装监察器21;安装箱8内设置安装室,侧壁设置开口14;通过电机一10传动的丝杠11转动设置在安装室内;齿轮一13通过与丝杠11螺纹配合,实现沿安装室内壁水平移动;齿轮一13转动设置在安装室内,一侧与齿条12啮合,另一侧与连接杆15的一端铰接;转动盘16转动设置在开口14上,一侧与连接杆15的另一端铰接;安装杆18设置在安装室外部,通过电机二17转动设置在转动盘16上;连接杆20的一端通过电机三19转动设置在安装杆18上,另一端连接安装监察器21。安装监察器21设置多组,多组安装监察器21与齿轮一13一一对应,沿齿条12等间距排列。
36.安装监察器21上设置有图像采集单元、红外测温单元、超声波测距单元和数据传输单元。控制模块包括控制单元28、数据处理单元27、数据采集单元、定位单元、参数设置单元和数据存储单元。
37.本发明工作原理如下:机体1飞行前,设置飞行路线,机体1按照路线开始监察。监察过程中,安全监察组件3工作,驱动件二、驱动件一7和伸缩件6配合,安装箱8在安装罩4的外围移动,同时自转。电机一10带动丝杠11旋转,齿条12水平移动,推动齿轮一13转动,连接杆15传动,转动盘16同步转动,同时安装杆18和连接杆20在两个方向上旋转,最终实现安装监察器21的全方位监察。图像采集单元、红外测温单元、超声波测距单元进行数据收集,将电力现场信息传输至数据采集单元,数据处理单元27对数据汇总、分析、判断。发现异常情况时(如设备破损、移位、温度异常),将异常位置信息发送至后台,并通过警报器22发出警报,提醒管理员注意。
38.工作人员进行维修工作时,可以同时使用多个设备,在工作人员的周围进行实时监察,避免视线死角,保证工作人员的安全。
39.实施例二
40.如图7所示,在上述实施例的基础上,本实施例中安装罩4内设置有隔板5;隔板5将安装罩4分隔为密封室和开放室;驱动件二和控制模块设置在密闭室。驱动件二包括电机四
24、齿轮二25、传动轴23和齿轮三26;齿轮二25键合连接电机四24的主轴;传动轴23设置两组,分别转动设置在安装罩4的两侧,相对的一端分别键合连接齿轮三26,另一端连接对应侧的伸缩件6;齿轮二25和齿轮三26啮合连接。伸缩件6为电缸;驱动件一7包括安装架和电机五;安装架设置在两组电缸的伸缩杆上,一组转动连接安装箱8的一侧,另一组通过电机五转动连接安装箱8的另一侧。
41.本实施例中驱动件二通过电机四24驱动,齿轮二25和齿轮三26传动,实现两组传动轴23的同步转动,配合伸缩件6的伸缩,对安装箱8的位置、角度进行调节,增大了监察的范围,保证了监察的全面性、高效性。
42.实施例三
43.如图8所示,在上述实施例的基础上,本实施例中开放室设置有收纳件;收纳件包括收纳筒31和清洁座32;收纳筒31设置在隔板5上;清洁座32设置在收纳筒31内,清洁端上设置有清洁刷。
44.本实施例中在开放室设置收纳件,在设备非工作状态下,安装箱8移动至开放室下方,安装监察器21伸入收纳筒31内,提高了安装监察器21的安全性,延迟其使用寿命。同时清洁座32上的清洁刷配合安装监察器21旋转,对其清洁,保证了监察视野的清晰。
45.实施例四
46.如图9所示,在上述实施例的基础上,本实施例中安装座2上设置有电动转盘29,并在其外围设置安装孔30;电动转盘29连接安装箱8。
47.本实施例设置安装座2,通过安装螺钉与安装孔30配合,实现安全监察组件3的安装,实现安装、拆卸的便捷。通过电动转盘29实现安全监察组件3的转动,进一步实现全面监察。
48.实施例五
49.本发明中一种数字化电力现场安全监察无人机,工作方法如下:
50.s1、机体1飞行前,设置飞行路线,机体1按照路线开始监察;
51.s2、监察过程中,安全监察组件3工作,驱动件二通过电机四24驱动,齿轮二25和齿轮三26传动,实现两组传动轴23的同步转动,配合伸缩件6的伸缩,同时驱动件一7带动安装箱8自转,安装箱8在安装罩4的外围移动,同时自转;
52.s3、电机一10带动丝杠11旋转,齿条12水平移动,推动齿轮一13转动,连接杆15传动,转动盘16同步转动,同时安装杆18和连接杆20在两个方向上旋转,安装监察器21开始全方位监察;
53.s4、安装监察器21中的图像采集单元、红外测温单元、超声波测距单元进行数据收集,将电力现场信息传输至数据采集单元,数据处理单元27对数据汇总、分析、判断;
54.s5、发现异常情况时,将异常位置信息发送至后台,并通过警报器22发出警报,提醒管理员注意;
55.s6、监察结束后,安装箱8移动至开放室下方,安装监察器21伸入收纳筒31内,同时清洁座32上的清洁刷配合安装监察器21旋转,对其清洁。
56.本实施例中的无人机通过“航线规划—自主飞行—飞行监控—数据整理”的全流程管理模式,按设定路线开展精细化巡检作业,实现智能监察,保证了电力现场的安全性,减少了工作人员的工作量。
57.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。