1.本实用新型涉及一种无人机,具体是一种现代农业植保无人机。
背景技术:
2.随着科技的发展,采用无人机进行植保飞行防治已势在必行。植保无人机是由飞控手在地面遥控或者预先设定好飞行路线后操作无人机进行喷雾施药作业,达到防治作物病虫害目的的一种新型施药器械。植保无人机具有工作效率高、施药均匀、作业成本低、防治效果优等优点。
3.目前,现有的植保无人机虽然能进行正常的喷药工作但不能对储药箱内部的剩余药量进行预警,而无人机在工作时仅凭操作人员的肉眼无法观测到无人机是否还在进行喷药工作。
技术实现要素:
4.本实用新型的目的在于提供一种现代农业植保无人机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种现代农业植保无人机,包括无人机本体,所述无人机本体的底部固定安装有安装架,所述无人机本体的底部且位于安装架的内部固定安装有储药箱,所述储药箱的一侧固定安装有第一进液管,进液管斜向插入储药箱的内部且与储药箱固定连接,所述储药箱的内部底侧固定安装有液位传感器,所述安装架的内部底侧固定安装有蓄电池,所述安装架的内部一侧固定安装有控制器,所述安装架的内部底侧且靠近中间的位置固定安装有抽液泵,所述抽液泵的进液端固定安装有第二进液管,进液管竖向插入储药箱的内部且与储药箱固定连接,所述抽液泵的出液端固定安装有出液管,出液管竖向穿出安装架,出液管的底端固定安装有分液槽,所述分液槽的底部固定安装有若干个雾化喷头,所述分液槽的顶部与底部分别与出液管和雾化喷头相通,所述无人机本体的顶部固定安装有声光报警器。
7.作为本实用新型再进一步的方案:所述安装架的两侧均固定安装有两个第一安装块,同侧的两个第一安装块之间固定安装有第一滑杆,所述第一滑杆上滑动连接有支架,所述支架的顶部与底部且位于第一滑杆的外侧均固定安装有第一弹簧,两个所述第一弹簧彼此远离的一侧分别与两个第一安装块固定连接,两个所述支架的两侧均通过转动连接有转动杆,所述支架的下方设置有支撑板,所述支撑板的顶部两侧均固定安装有第二安装块,两个第二安装块之间固定安装有第二滑杆,所述第二滑杆上对称滑动连接有两个滑块,同侧的两个所述转动杆均通过另一个转轴分别与两个滑块转动连接,同侧的两个所述滑块彼此远离的一侧均固定安装有第二弹簧,同侧的两个所述第二弹簧彼此远离的一侧分别与两个第二安装块固定连接。
8.作为本实用新型再进一步的方案:所述液位传感器、声光报警器与抽液泵均通过
导线与控制器电连接,所述抽液泵和声光报警器均通过导线与蓄电池电连接,所述控制器通过无线模块与外接开关无线连接。
9.作为本实用新型再进一步的方案:同侧的两个所述滑块之间且位于第二滑杆外侧固定安装有第三弹簧。
10.作为本实用新型再进一步的方案:所述第二滑杆和第一滑杆的表面均为抛光设计。
11.作为本实用新型再进一步的方案:所述分液槽为钢性材质所造。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型通过蓄电池、抽液泵、雾化喷头、储药箱和液位传感器等组件之间的互相配合,抽液泵抽取储药箱中的药液再由雾化喷头喷出,当液位传感器检测到储药箱中的药液低于设定值时,液位传感器会将信号传递给控制器,控制器控制声光报警器发出警报,达到对储药箱剩余药量进行预警,远程提醒操作人员使无人机本体返航对储药箱进行补药。
14.2、本实用新型通过支架、转动杆、滑块、第一弹簧和第二弹簧等组件之间的互相配合,控制无人机本体返航时支撑板先接触地面,受到的冲力会带动转动杆往复挤压滑块和第二弹簧,并且支架也会往复挤压两个第一弹簧,进而使冲力得以缓冲,起到保护无人机本体的效果。
附图说明
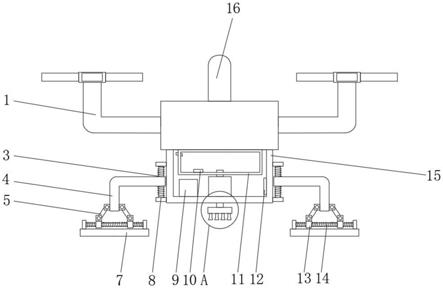
15.图1为本实用新型中的结构示意图。
16.图2为本实用新型图1中a处的放大图。
17.图3为本实用新型中的局部结构示意图。
18.1、无人机本体;2、雾化喷头;3、第一弹簧;4、支架;5、转动杆;6、分液槽;7、支撑板;8、第一滑杆;9、蓄电池;10、液位传感器;11、储药箱;12、控制器;13、滑块;14、第二滑杆;15、安装架;16、声光报警器;17、抽液泵;18、第二弹簧;19、第三弹簧。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1~3,本实用新型实施例中,一种现代农业植保无人机,包括无人机本体1,无人机本体1的底部固定安装有安装架15,无人机本体1的底部且位于安装架15的内部固定安装有储药箱11,储药箱11的一侧固定安装有第一进液管,进液管斜向插入储药箱11的内部且与储药箱11固定连接,储药箱11的内部底侧固定安装有液位传感器10,安装架15的内部底侧固定安装有蓄电池9,安装架15的内部一侧固定安装有控制器12,安装架15的内部底侧且靠近中间的位置固定安装有抽液泵17,抽液泵17的进液端固定安装有第二进液管,进液管竖向插入储药箱11的内部且与储药箱11固定连接,抽液泵17的出液端固定安装有出液管,出液管竖向穿出安装架15,出液管的底端固定安装有分液槽6,分液槽6的底部固定安
装有若干个雾化喷头2,分液槽6的顶部与底部分别与出液管和雾化喷头2相通,无人机本体1的顶部固定安装有声光报警器16。
21.安装架15的两侧均固定安装有两个第一安装块,同侧的两个第一安装块之间固定安装有第一滑杆8,第一滑杆8上滑动连接有支架4,支架4的顶部与底部且位于第一滑杆8的外侧均固定安装有第一弹簧3,两个第一弹簧3彼此远离的一侧分别与两个第一安装块固定连接,两个支架4的两侧均通过转动连接有转动杆5,支架4的下方设置有支撑板7,支撑板7的顶部两侧均固定安装有第二安装块,两个第二安装块之间固定安装有第二滑杆14,第二滑杆14上对称滑动连接有两个滑块13,同侧的两个转动杆5均通过另一个转轴分别与两个滑块13转动连接,同侧的两个滑块13彼此远离的一侧均固定安装有第二弹簧18,同侧的两个第二弹簧18彼此远离的一侧分别与两个第二安装块固定连接。
22.液位传感器10、声光报警器16与抽液泵17均通过导线与控制器12电连接,抽液泵17和声光报警器16均通过导线与蓄电池9电连接,控制器12通过无线模块与外接开关无线连接。
23.同侧的两个滑块13之间且位于第二滑杆14外侧固定安装有第三弹簧19。
24.第二滑杆14和第一滑杆8的表面均为抛光设计。
25.分液槽6为钢性材质所造。
26.本实用新型中液位传感器10为已公开结构,选用的型号为cyw11型。
27.本实用新型中控制器12为已公开结构,选用的型号为fx3u-16型。
28.本实用新型的工作原理是:
29.本实用新型通过蓄电池9、抽液泵17、雾化喷头2、储药箱11和液位传感器等组件之间的互相配合,远程控制无人机本体1飞行,抽液泵17通过第二进液管抽取储药箱11中的药液,由出液管流入分液槽6再由雾化喷头2喷出,当液位传感器10中检测到储药箱11中的药液低于设定值时,液位传感器10会将信号传递给控制器12,控制器12控制声光报警器16发出警报,远程提醒操作人员使无人机本体1返航对储药箱11进行补药,控制无人机本体1返航时,无人机本体1下方的支撑板7先接触地面,受到的冲力会带动转动杆5往复挤压滑块13和第二弹簧18,并且支架4也会往复挤压两个第一弹簧3,进而使冲力得以缓冲,起到保护无人机本体1的效果。
30.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。