1.本实用新型涉及用于飞行器的天线定位技术,具体而言,涉及飞行器以及用于飞行器定位天线的电路装置。
背景技术:
2.在搭载雷达的飞行器(例如无人机)上,通常,飞行器上为飞行器和雷达分别配置定位天线(例如rtk天线、gps天线等)。为了探测需要,雷达一般安装于飞行器腹部,而雷达定位天线一般需安装于雷达上部,这样雷达定位天线就会因被机舱盖或者其他机体结构遮挡而无法接收信号,解决办法是将雷达定位天线引出来,需要在飞行器机体上开孔,这造成飞行器上整体的天线配置复杂,同时增加了飞行器负重及构造成本。
技术实现要素:
3.本实用新型的目的是提供一种飞行器以及用于飞行器定位天线的电路装置,以克服现有技术中的问题。
4.根据本实用新型的一个方面,提供了一种飞行器,所述飞行器能够搭载机载雷达,并且所述飞行器包括:定位天线,用于接收定位信号;飞行器天线接收机,其接收并处理所述定位信号,用于确定所述飞行器的位置;和雷达天线接收机,用于确定所述机载雷达的位置。所述飞行器还包括一电路装置,所述电路装置包括第一功分器,用于连接至定位天线并将来自所述定位天线的定位信号输出到第一输出电路和第二输出电路,从而将所述定位信号输出给所述飞行器天线接收机和所述雷达天线接收机,所述雷达天线接收机基于所述定位信号确定所述机载雷达的位置。
5.优选地,所述电路装置还可以包括防瞬断误报短路电阻器,所述防瞬断误报短路电阻器设置在所述第一输出电路和所述第二输出电路的一者中,并具有一定的阻值以将电路中的瞬时电流抑制在低于能够触发短路保护的电流阈值的水平。
6.优选地,所述电路装置还可以包括与所述第一功分器串联的一滤波电路,该滤波电路能够导通直流并且能够衰减第一频带上的信号,所述第一频带邻近所述定位天线的工作频带。
7.有利地,所述电路装置还可以包括隔交通直电感器,所述隔交通直电感器与所述滤波电路并联。
8.有利地,所述滤波电路可以包括第二功分器、第三功分器以及并联在所述第二功分器和第三功分器之间的第一带通滤波器、第二带通滤波器和隔交通直电感器,所述第一带通滤波器用于通过第二频带的信号,所述第二带通滤波器用于通过第三频带的信号,所述第一频带位于所述第二频带与所述第三频带之间。
9.根据本实用新型的另一个方面,提供了一种用于飞行器定位天线的电路装置,其包括:第一功分器,用于连接至定位天线并将来自定位天线的定位信号输出到第一输出电路和第二输出电路;以及防瞬断误报短路电阻器,所述防瞬断误报短路电阻器设置在所述
第二输出电路中并具有一定的阻值以将电路中的瞬时电流抑制在低于能够触发短路保护的电流阈值的水平。
10.优选地,所述电路装置还可以包括与所述第一功分器串联的一滤波电路,该滤波电路能够导通直流并且能够衰减第一频带上的信号,所述第一频带邻近所述定位天线的工作频带。
11.有利地,所述电路装置还可以包括隔交通直电感器,所述隔交通直电感器与所述滤波电路并联。
12.有利地,所述滤波电路可以包括第二功分器、第三功分器以及并联在所述第二功分器和第三功分器之间的第一带通滤波器、第二带通滤波器,所述第一带通滤波器用于通过第二频带的信号,所述第二带通滤波器用于通过第三频带的信号,所述第一频带位于所述第二频带与所述第三频带之间。
13.根据本实用新型实施例,定位天线接收的定位信号能够被同时用于确定飞行器的位置和机载雷达的位置,消除了对专用于机载雷达的定位天线的需求。这样减少了飞行器上所需配置的定位天线的数量,有利于简化结构,降低成本。
附图说明
14.通过阅读参照以下附图所作的对非限制性实施例的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
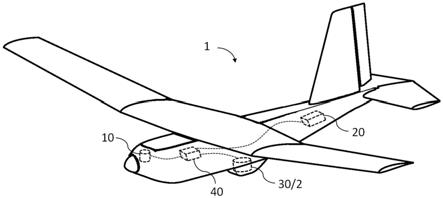
15.图1为根据本实用新型一实施例的飞行器的结构示意图;
16.图2为根据本实用新型另一实施例的飞行器的示意性框图,其中飞行器使用了根据本实用新型实施例一的用于定位天线的电路装置;
17.图3为根据本实用新型实施例二的用于飞行器定位天线的电路装置的示意性框图;
18.图4为根据本实用新型实施例三的用于飞行器定位天线的电路装置的示意性框图;
19.图5示出了可用于图4所示电路装置的滤波电路的一个示例,其中滤波电路采用lc振荡电路构成;以及
20.图6和图7分别示出图4所示电路装置的其它两个示例。
具体实施方式
21.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
22.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
23.图1为根据本实用新型一实施例的飞行器1的结构示意图。如图1所示,飞行器1能够搭载机载雷达2,该飞行器1包括用于接收定位信号的定位天线10、飞行器天线接收机20以及雷达天线接收机30。本实施例中的雷达天线接收机30被集成在机载雷达2内。根据本实用新型实施例,飞行器1还包括功分器(第一功分器)40,功分器40配置为使得来自定位天线
10的定位信号通过功分器40被输出给飞行器天线接收机20和雷达天线接收机30。飞行器天线接收机20接收并处理定位信号以确定飞行器1的位置。雷达天线接收机30基于定位信号确定机载雷达2的位置。
24.根据本实用新型实施例,由于定位天线10的定位信号通过功分器40被输出给飞行器天线接收机20和雷达天线接收机30,所以消除了对专用于机载雷达2的定位天线的需求。这样减少了飞行器上所需配置的定位天线的数量,有利于简化结构,降低成本。
25.另外实用新型人发现:现有技术中如果给雷达单独设置雷达定位天线,需要开孔给雷达定位天线找位置。实际上飞行器的定位天线需要高精度的位置,雷达的定位天线也需要高精度的位置。实际情况中,飞行器受到的电磁干扰非常多,在一架飞行器上同时找到两个电磁干扰少的位置几乎不可能,甚至只能找到一个干扰相对比较少的位置。因此将共用的定位天线10放置到这个位置,通过功分器40共用定位天线10,这使得飞行器和雷达的天线位置精度都达到最优,使得搭载雷达的飞行器仍然能够平稳飞行,达到了意想不到的良好效果。
26.应该理解的是,图1中所示机载雷达2、定位天线10、飞行器天线接收机20、雷达天线接收机30和功分器40在飞行器1中的设置位置仅仅是示意性的,而非限制性的。例如,在图1所示示例中,飞行器1例如为无人机,机载雷达2搭载在无人机的吊舱中,雷达天线接收机30集成在机载雷达2中,然而本实用新型并不限于机载雷达2和雷达天线接收机30的特定设置位置。又例如,所接收的定位信号通过功分器40被分享给飞行器天线接收机20和雷达天线接收机30的定位天线10可以是用于确定飞行器1位置和定向的一组定位天线(例如rtk天线或其它类型天线)中的任一个。优选地,如图1所示,定位天线10可以为一组rtk天线中的前定向天线,前定位天线通常被作为主天线使用,当此处干扰比较小的时候,它的定位测量精度较高。前定向天线的较高定位测量精度有利于获得更加准确的机载雷达2的位置。此外,功分器40尽管在图1中被示出为分立的装置,但是在其它示例中,功分器40例如可以与定位天线10一起形成定位天线设备,或者与飞行器天线接收机20组装或集成在一起以形成集成的飞行器天线接收机,本实用新型在此方面不受限制。
27.图2通过框图示意性地示出了根据本实用新型另一实施例的飞行器1’。如图2所示,飞行器1’中可以搭载机载雷达2’,并且包括定位天线10、飞行器天线接收机20、雷达天线接收机30以及根据本实用新型实施例一的用于定位天线的电路装置100。电路装置100连接在定位天线10与飞行器天线接收机20以及雷达天线接收机30之间,并包括功分器110,功分器110对应于图1所示的功分器40,用于接至定位天线10并将来自定位天线10的定位信号输出到第一输出电路a和第二输出电路b。定位信号可以通过电路装置100由第一输出电路a输出给雷达天线接收机30,由第二输出电路b输出给飞行器天线接收机20。与图1所示飞行器1中类似,飞行器1’中飞行器天线接收机20接收并处理定位信号以确定飞行器1的位置,雷达天线接收机30基于定位信号确定机载雷达2’的位置。
28.与图1所示实施例的不同之处在于,在图2所示实施例中,电路装置100除了功分器110,可选地还包括防倒灌电容器120,该防倒灌电容器120设置在第一输出电路a中。这样,当电路装置100被结合在飞行器1’中时,防倒灌电容器120连接在功分器110和雷达天线接收机30之间,可以通过电容器的隔直特性,隔断功分器110与雷达天线接收机30之间的直流电流。
29.之所以如此配置是因为本实用新型的发明人发现:如果能够通过飞行器天线接收机20为定位天线10馈电,那将是有利的。然而,在根据本实用新型实施例的电路装置100中,功分器110的两个输出电路,第一输出电路a和第二输出电路b,之间并非完全独立和隔绝,导致飞行器天线接收机20提供给定位天线10的直流馈电电流可能经由功分器110向雷达天线接收机30倒灌,造成对雷达天线接收机30的冲击和损害。反之亦然,雷达天线接收机30中如果提供馈电电源,则来自雷达天线接收机30的馈电电流也可能经由功分器110向飞行器天线接收机20倒灌,造成对飞行器天线接收机20的冲击和损害。具体是直流馈电电流经由功分器110向雷达天线接收机30倒灌还是馈电电流经由功分器110向飞行器天线接收机20倒灌,取决于飞行器天线接收机20和雷达天线接收机30的电压高低。如果飞行器天线接收机20的电压高于雷达天线接收机30的电压,就是向雷达天线接收机30倒灌;如果是雷达天线接收机30的电压高于飞行器天线接收机20的电压,就是向飞行器天线接收机20倒灌。
30.考虑到这个问题,发明人提出,在连接至机载雷达30的第一输出电路a中设置防倒灌电容器120,以隔断直流,防止直流电流向机载雷达30的倒灌。由于飞行器的飞行器天线接收机20通常需要知道定位天线10的工作状态,通常这个工作状态是通过直流电流检测来实现的,所以将防倒灌电容器120设置在第一输出电路a上既保证了飞行器的飞行器天线接收机20能够正常检测定位天线10的工作状态,同时又能够保护雷达天线接收机30及飞行器天线接收机20。
31.有利地,防倒灌电容器120的电容值选取为大于等于56pf,这样选取隔直电容远大于射频电路中的匹配电容,串在电路中不影响射频通路的匹配。优选地,防倒灌电容器120的电容值大于等于100pf。
32.功分器110优选采用威尔金森功分器,从而对馈电直流电流不产生阻隔。
33.仅作为示例,在图2所示示例中,雷达天线接收机30没有被集成在机载雷达2’中的。应该理解的是,根据本实用新型的不同实施例,雷达天线接收机可以集成或者不集成在机载雷达中。当雷达天线接收机和雷达分离时,需要在将雷达天线接收机设置于功分器/防倒灌电容器和机载雷达之间。
34.图2中仅仅示出可以结合到根据本实用新型实施例的飞行器中的电路装置的一个实施例。接下来,将参照图3介绍根据本实用新型实施例二的用于飞行器定位天线的电路装置200,其可以与图2所示电路装置100相似地被结合到飞行器中。
35.与图2所示电路装置100类似,图3所示电路装置200包括功分器210和可选的防倒灌电容器220,其中功分器210用于接至如图1和图2所示的定位天线10并将来自定位天线10的定位信号输出到第一输出电路a和第二输出电路b,从而定位信号可以通过电路装置200由第一输出电路a输出给雷达天线接收机30,由第二输出电路b输出给飞行器天线接收机20;防倒灌电容器220设置在第一输出电路a中,可以用于隔断功分器210与雷达天线接收机30之间的直流电流。
36.天线的接收通路中通常设有短路保护电路以在电流大于某电流阈值例如150ma时触发短路保护。飞行器的震动,尤其是燃油飞行器的油机的震动,经常可能引起电路中连接器的瞬断,产生较大的瞬断电流,引起短路保护电路发出误报短路的信号而导致短路保护被触发。根据本实用新型实施例二,如图3所示,电路装置200还包括防瞬断误报短路电阻器230,其设置在第二输出电路b中,并具有一定的阻值以将电路中的瞬时电流抑制在低于能
够触发短路保护的电流阈值(例如150ma)的水平。这样,可以防止电路瞬断被误报为短路,抑制不必要的短路保护,有利于提高飞行器的定位可靠性。
37.对于利用燃油提供动力的固定翼无人机,设置防瞬断误报短路电路器r尤为有利,其中防瞬断误报短路电阻器r的阻值可以选择在18~82欧姆,优选地阻值可以为20~24欧姆。
38.优选地,如图3所示,电路装置200还可以包括第一连接器j1、第二连接器j2和第三连接器j3,第一连接器j1用于连接至定位天线10(见图2),第二连接器j2用于连接至飞行器天线接收机20(见图2),第三连接器j3用于连接至雷达天线接收机30(见图2)。
39.第一连接器j1、第二连接器j2和第三连接器j3优选采用sma(sub miniature version a,超小型版本a)连接器,特别是带法兰的sma连接器。sma连接器的螺纹连接方式能够有效地防止飞行器飞行过程中的颠簸、震动造成的电路瞬断,确保飞行定位。sma连接器如果带有法兰,则法兰有助于防止附近的例如图像传输信号耦合到定位天线接收电路中而阻塞飞行器天线接收机20。
40.图4为根据本实用新型实施例三的用于飞行器定位天线的电路装置300的示意性框图。如图4所示,电路装置300包括功分器310和设置在功分器310的第一输出电路a中的可选的防倒灌电容器320,防倒灌电容器320可以用于隔断功分器310与雷达天线接收机30之间的直流电流。电路装置300还可以包括防瞬断误报短路电阻器330,防瞬断误报短路电阻器330可以与图3所示电路装置200中的防瞬断误报短路电阻器230具有相同的结构和功能,在此不再赘述。
41.相比于图3所示的电路装置200,电路装置300进一步包括与功分器310串联的一滤波电路340。根据本实施例,该滤波电路340能够导通直流并且能够衰减第一频带上的信号,所述第一频带邻近定位天线10的工作频带。电路装置300中的滤波电路340能够导通直流,使得电路装置300可以同时用作定位天线10的馈电电路的一部分。
42.如图4所示,滤波电路340优选串联在功分器310的输入侧。
43.图4所示电路装置300对于使用rtk天线作为定位天线10的飞行器尤为有利。具体而言,本实用新型的发明人发现:在例如无人机的飞行器上通常设置有数据链传输模块,而且数据链传输模块与rtk天线通常设置在比较近的距离内;rtk天线一般工作频率在以大约1.2g和1.5g为中心频率的两个频带上,而数据链传输模块在进行图像传输时通常使用的合法频带一般在1.4g左右,有的情形下会下探至1.3g,这导致用于图像数据传输的信号有可能落入rtk天线的工作频带内,从而耦合到rtk通路中,对rtk信号接收产生强烈的干扰。特别是,进行图像传输的信号需要较大的功率,而为了加大图像传输距离,则需要进一步增大其发射功率,因此用于图像数据传输的信号甚至可能将rtk天线接收机打饱和,导致接收机阻塞,严重影响定位和导航。这对于固定翼飞行器来说尤其危险。迄今为止,这样的风险未被意识也未有对策。
44.有利地,滤波电路340的所述第一频带覆盖飞行器上的数据链传输模块(未示出)所使用的数据链频带,以便能够对通过rtk定位天线被接收的、数据链频带内的信号进行衰减,从而降低对rtk定位信号接收和处理的干扰。
45.优选地,第一频带覆盖1430-1438mhz频率区间和1438-1444mhz频率区间中的至少一者。例如,在有利的实施例中,第一频带可以覆盖1300-1450mhz频率区间。1430-1438mhz
和1438-1444mhz是可用于图像传输的两个法定的频率区间,因此通常数据链传输模块20的数据链频带会使用这两个频率区间中的至少一者。根据本实用新型实施例,选择电路装置300的滤波电路340的第一频带覆盖1430-1438mhz频率区间和1438-1444mhz频率区间中的至少一者,可以针对性地降低数据链传输模块(未示出)的图像传输信号对rtk定位信号接收和处理的干扰,从而降低rtk定位系统不能正常工作的风险。
46.优选地,电路装置300还可以包括分别用于连接至定位天线10、飞行器天线接收机20和雷达天线接收机30(见图2)的第一连接器j1、第二连接器j2和第三连接器j3,并且第一连接器j1、第二连接器j2和第三连接器j3优选采用sma连接器。
47.图5示出了可用于图4所示电路装置的滤波电路的一个示例,其中滤波电路采用lc振荡电路构成。具体而言,在图5所示示例中,滤波电路340包括第一lc电路lc1和第二lc电路lc2。第一lc电路lc1包括并联的第一电感器l1和第一电容器c1,用于与定位天线10(见图2)串联。第二lc电路lc2包括串联的第二电感器l2和第二电容器c2。第二lc电路lc2通过接地而与定位天线10并联。
48.第一电感器l1和第二电感器l2的电感值、第一电容器c1和第二电容器c2的电容值,可以根据欲衰减的频带(即第一频带)而适当地设定。这是本领域技术人员基于常识和经验可以实现的,在此不再赘述。
49.图6和图7分别示出图4所示电路装置的两个示例,其中滤波电路包括两个带通滤波器。
50.首先来看图6所示电路装置300a。如图6所示,电路装置300a中,用于将来自定位天线10的定位信号输出到第一输出电路a和第二输出电路b的功分器为第一功分器310。滤波电路340a包括第二功分器341、第三功分器342以及相互并联连接在第二功分器341和第三功分器342之间的第一带通滤波器343、第二带通滤波器344。第一带通滤波器343用于通过第二频带的信号,第二带通滤波器344用于通过第三频带的信号,上述讨论的第一频带位于该第二频带与该第三频带之间。可以看到,第一带通滤波器343和第二带通滤波器344并联构成了能够衰减第一频带上的信号的带阻滤波器,可以用于例如降低非定位信号对定位信号接收和处理的干扰。
51.如图6所示,滤波电路340a还可以包括与第一带通滤波器343、第二带通滤波器344并联地连接在第二功分器341和第三功分器342之间的一隔交通直电感器345。这样,滤波电路340a能够导通通往定位天线10的直流电流,从而能够用作定位天线10的馈电电路的一部分。此外,选用电感器345来提供定位天线10的馈电通路还可以防止有用的定位射频信号经由馈电电源流走。这样,定位天线10的馈电电源(未示出)可以设置在例如第二输出电路b中。优选地,在第二输出电路b中设置有防瞬断误报短路电阻器330的情况下,馈电电源可以设置在防瞬断误报短路电阻器330的靠近飞行器天线接收机20的一侧。有利地,根据本实用新型实施例,允许由飞行器天线接收机20为定位天线10馈电,即飞行器天线接收机20用作定位天线10的馈电电源,从而使得整体电路结构更加简洁、高效。
52.优选地,第二功分器341和第三功分器342为威尔金森功分器,从而对直流电流的通过不产生阻碍。第一带通滤波器343和第二带通滤波器344例如可以采用声表面滤波器。
53.在图6所示示例中,滤波电路340a还可以包括第一限幅器346和第二限幅器347,其中第一限幅器346与第一带通滤波器343串联在第二功分器341和第三功分器342之间,第二
限幅器347与第二带通滤波器344串联在第二功分器341和第三功分器342之间。上述限幅器346、347可以防止数据链传输模块(未示出)发射的大功率信号通过定位天线10被传导到飞行器天线接收机20,造成接收机阻塞。
54.优选地,第一限幅器346与第二限幅器347分别相对于第一带通滤波器343和第二带通滤波器344位于更靠近定位天线10的一侧,从而进一步对带通滤波器形成保护。举例来说,部分声表面滤波器产品的耐受信号水平在大约10dbm,而无人机的数据链传输模块发射的图像传输信号被耦合到rtk定位天线并在rtk接收电路中经过可能的功率放大之后可能达到20dbm左右;在带通滤波器的靠近rtk天线一侧设置限幅器346、347可以有效地避免例如过强的图像传输信号对带通滤波器343、344的损害。
55.接下来来看图7所示电路装置300b。图7所示电路装置300b与图6所示电路装置300a具有基本上相同的结构,不同之处仅在于:在电路装置300b的滤波电路340b中不包括隔交通直电感器;而电路装置300b包括与滤波电路340b并联的隔交通直电感器350。在图7所示示例中,隔交通直电感器350的两端分别连接至第二功分器341和第三功分器342的外侧(与带通滤波器343、344相反的一侧),从而与第二功分器341和第三功分器342以及连接在两者之间的电路部分(包括第一带通滤波器343和第二带通滤波器344)并联。
56.与图6所示电路装置300a相比,图7所示电路装置300b中由于隔交通直电感器350没有连接在第二功分器341和第三功分器342之间,所以对于第二功分器341和第三功分器342的“导通直流”的性能没有要求和限制,为电路设计提供了更多便利。
57.应该理解的是,在图7所示电路装置300b中,滤波电路340b的结构仅为示例性的,滤波电路340b可以采用与图示不同的电路结构。
58.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。