1.本实用新型涉及无人机技术领域,尤其涉及一种高稳定性的遥感测绘无人机。
背景技术:
2.无人机是指不需要飞行员在飞机上进行操控的飞行设备,随着科学技术的发展,无人机被广泛应用于遥感测绘领域,相较于人工测绘,它可以大大提高测绘的效率和精度,能够对人力难以到达的位置进行测绘,因此无人机在遥感测绘领域中的作用也越来越重要。
3.在使用无人机进行遥感测绘时,需要借助无人机搭载的摄像头对测绘地域进行拍摄,但是在起雾天气中,由于空气的湿度较高,无人机在飞行过程中,其摄像头的表面容易产生水雾,导致摄像头拍摄的画面不清晰,使无人机的测绘效率下降,从而降低无人机的实用性。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中在雾天使用无人机进行测绘拍摄时,其摄像头的表面容易产生水雾,导致摄像头拍摄画面不清晰的缺点,而提出的一种高稳定性的遥感测绘无人机。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种高稳定性的遥感测绘无人机,包括无人机本体和清洁装置,所述无人机本体的表面安装有姿态控制器,所述无人机本体的表面安装有摄像头,所述无人机本体相对于摄像头的位置设有清洁装置,所述清洁装置包括支撑板,所述支撑板位于无人机本体的表面,所述支撑板的表面固装有伺服电机,所述伺服电机的转轴固装有牵引绳,所述牵引绳远离伺服电机的一端固装有连接板,所述无人机本体相对于连接板的位置固装有两个支撑杆,两个所述支撑杆的圆弧面均滑动连接有滑块,两个所述滑块均与连接板固定连接,所述连接板靠近摄像头的一侧固装有清洁板,通过设置清洁装置,达到在使用无人机进行测绘的过程中就可以对摄像头的表面进行清洁,从而节省清洁摄像头时间的作用。
6.优选的,所述支撑杆的圆弧面套有弹簧,所述弹簧的两端分别与无人机本体和滑块固定连接,通过设置弹簧,达到使连接板借助弹簧的弹力向上滑动的作用。
7.优选的,所述支撑杆远离无人机本体的一端固装有挡板,所述滑块位于挡板的表面,通过设置挡板,达到限制滑块滑动路径,防止滑块与支撑杆脱离接触的作用。
8.优选的,所述伺服电机的转轴固装有两个限位板,所述牵引绳位于两个限位板之间,通过设置两个限位板,达到防止牵引绳与伺服电机的转轴脱离接触而松散的作用。
9.优选的,所述无人机本体的表面设有防护装置,所述防护装置包括四个矩形板,四个所述矩形板的表面均套有套管,四个所述套管的上表面均固装有卡板,所述卡板的横截面呈“u”形,四个所述卡板的内壁卡接有防护框,通过设置防护装置,达到在运输无人机的过程中,防止无人机的旋翼被外界的物品碰撞而损坏的作用。
10.优选的,所述无人机本体相对于四个卡板的位置均固装有弹性布,所述弹性布远离无人机本体的一端固装有挂钩,所述卡板的表面固装有固定架,所述挂钩的尺寸与固定架的尺寸相适配,通过将挂钩与固定架相卡接,达到限制固定架位置进而限制防护框位置的作用。
11.优选的,所述套管的表面开设有卡槽,所述卡槽的内壁滑动连接有定位板,所述定位板与矩形板固定连接,通过设置定位板,达到限制套管的滑动路径,从而方便将卡板与防护框对齐的作用。
12.与现有技术相比,本实用新型的优点和积极效果在于:
13.1、本实用新型中,无人机本体内部的芯片将飞行数据传递给姿态控制器,姿态控制器进而将芯片反馈的数据进行处理实时根据无人机本体的飞行姿态对无人机本体进行调节,提高无人机本体飞行的稳定性,通过设置清洁装置,当需要使用清洁装置时,启动伺服电机,伺服电机的转轴开始转动,使牵引绳从转轴的表面展开,此时弹簧开始收缩,滑块借助弹簧的弹力沿支撑杆的表面向靠近摄像头的方向滑动,滑块滑动还会带动连接板同向滑动,连接板滑动会带动清洁板沿摄像头的表面滑动,达到清洁摄像头表面附着水雾的作用,在对摄像头清洁完毕后,再次启动伺服电机,使伺服电机的转轴向相反的方向转动,此时伺服电机的转轴开始缠绕牵引绳,使牵引绳沿两个限位板的表面滑动,在此过程中,限位板达到限制牵引绳位置,防止牵引绳与伺服电机转轴脱离接触的作用,牵引绳移动会带动连接板向下滑动,达到防止连接板遮挡摄像头,影响摄像头正常工作的作用,连接板滑动会带动滑块同向滑动,滑块滑动会拉伸弹簧,此时弹簧处于拉伸状态,滑块继续滑动会与挡板接触,此时挡板达到限制滑块的滑动路径,防止滑块与支撑杆脱离接触的作用,通过设置清洁装置,具有在无人机飞行过程中就可以清理附着在摄像头表面的水雾,从而使摄像头能够正常工作,提高摄像头拍摄画面的清晰度,使无人机的测绘效率提高,进而提高无人机实用性的效果。
14.2、本实用新型中,通过设置防护装置,当需要使用防护装置时,分别将四个套管套在四个矩形板的表面后,向靠近定位板的方向滑动套管,套管滑动会带动卡槽的内壁沿定位板的表面滑动,当卡槽的内壁与定位板的表面紧密接触后,将防护框分别与四个卡板相卡接,达到固定防护框位置的作用,然后拉动挂钩,挂钩移动会拉伸弹性布,此时弹性布处于拉伸状态,在将挂钩卡接在固定架的表面后松开挂钩,此时弹性布开始收缩,挂钩借助弹性布的弹力会与固定架紧密接触,达到固定挂钩位置进而固定防护框位置的作用,通过设置防护装置,具有在运输无人机的过程中,防止无人机的旋翼被外界的物品碰撞而损坏的情况发生,从而提高旋翼的使用寿命,进而提高无人机使用寿命的效果。
附图说明
15.图1为本实用新型提出一种高稳定性的遥感测绘无人机的立体结构示意图;
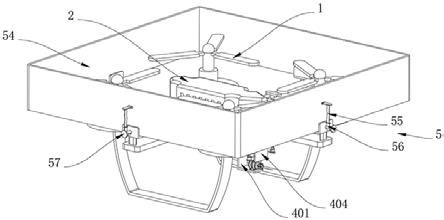
16.图2为本实用新型提出一种高稳定性的遥感测绘无人机图1的部分结构示意图;
17.图3为本实用新型提出一种高稳定性的遥感测绘无人机图2后方的部分结构示意图;
18.图4为本实用新型提出一种高稳定性的遥感测绘无人机图2另一角度的部分结构示意图;
19.图5为本实用新型提出一种高稳定性的遥感测绘无人机图4的部分结构示意图;
20.图6为本实用新型提出一种高稳定性的遥感测绘无人机防护装置的部分结构示意图。
21.图例说明:1、无人机本体;2、姿态控制器;3、摄像头;4、清洁装置;401、支撑板;402、伺服电机;403、牵引绳;404、连接板;405、支撑杆;406、滑块;407、弹簧;408、挡板;409、限位板;410、清洁板;5、防护装置;51、矩形板;52、套管;53、卡板;54、防护框;55、弹性布;56、挂钩;57、固定架;58、定位板;59、卡槽。
具体实施方式
22.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
23.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
24.请参阅图1-6,本实用新型提供一种技术方案:一种高稳定性的遥感测绘无人机,包括无人机本体1和清洁装置4,无人机本体1的表面安装有姿态控制器2,无人机本体1的表面安装有摄像头3,无人机本体1相对于摄像头3的位置设有清洁装置4,无人机本体1的表面设有防护装置5。
25.下面具体说一下其清洁装置4和防护装置5的具体设置和作用。
26.本实施方案中:清洁装置4包括支撑板401,支撑板401位于无人机本体1的表面,支撑板401的表面固装有伺服电机402,伺服电机402的转轴固装有牵引绳403,牵引绳403远离伺服电机402的一端固装有连接板404,无人机本体1相对于连接板404的位置固装有两个支撑杆405,两个支撑杆405的圆弧面均滑动连接有滑块406,两个滑块406均与连接板404固定连接,连接板404靠近摄像头3的一侧固装有清洁板410,通过设置清洁装置4,达到在使用无人机进行测绘的过程中就可以对摄像头3的表面进行清洁,从而节省清洁摄像头3时间的作用。
27.具体的,支撑杆405的圆弧面套有弹簧407,弹簧407的两端分别与无人机本体1和滑块406固定连接,通过设置弹簧407,达到使连接板404借助弹簧407的弹力向上滑动的作用。
28.具体的,支撑杆405远离无人机本体1的一端固装有挡板408,滑块406位于挡板408的表面。
29.在本实施例中:通过设置挡板408,达到限制滑块406滑动路径,防止滑块406与支撑杆405脱离接触的作用。
30.具体的,伺服电机402的转轴固装有两个限位板409,牵引绳403位于两个限位板409之间,通过设置两个限位板409,达到防止牵引绳403与伺服电机402的转轴脱离接触而松散的作用。
31.在本实施例中:防护装置5包括四个矩形板51,四个矩形板51的表面均套有套管52,四个套管52的上表面均固装有卡板53,卡板53的横截面呈“u”形,四个卡板53的内壁卡
接有防护框54,通过设置防护装置5,达到在运输无人机的过程中,防止无人机的旋翼被外界的物品碰撞而损坏的作用。
32.具体的,无人机本体1相对于四个卡板53的位置均固装有弹性布55,弹性布55远离无人机本体1的一端固装有挂钩56,卡板53的表面固装有固定架57,挂钩56的尺寸与固定架57的尺寸相适配,通过将挂钩56与固定架57相卡接,达到限制固定架57位置进而限制防护框54位置的作用。
33.具体的,套管52的表面开设有卡槽59,卡槽59的内壁滑动连接有定位板58,定位板58与矩形板51固定连接。
34.在本实施例中:通过设置定位板58,达到限制套管52的滑动路径,从而方便将卡板53与防护框54对齐的作用。
35.工作原理:姿态控制器2能够实时根据无人机本体1的飞行姿态对无人机本体1进行调节,提高无人机本体1飞行的稳定性,通过设置清洁装置4,当需要使用清洁装置4时,启动伺服电机402,伺服电机402的转轴开始转动,使牵引绳403从转轴的表面展开,此时弹簧407开始收缩,滑块406借助弹簧407的弹力沿支撑杆405的表面向靠近摄像头3的方向滑动,滑块406滑动还会带动连接板404同向滑动,连接板404滑动会带动清洁板410沿摄像头3的表面滑动,达到清洁摄像头3表面附着水雾的作用,在对摄像头3清洁完毕后,再次启动伺服电机402,使伺服电机402的转轴向相反的方向转动,此时伺服电机402的转轴开始缠绕牵引绳403,使牵引绳403沿两个限位板409的表面滑动,在此过程中,限位板409达到限制牵引绳403位置,防止牵引绳403与伺服电机402转轴脱离接触的作用,牵引绳403移动会带动连接板404向下滑动,达到防止连接板404遮挡摄像头3,影响摄像头3正常工作的作用,连接板404滑动会带动滑块406同向滑动,滑块406滑动会拉伸弹簧407,此时弹簧407处于拉伸状态,滑块406继续滑动会与挡板408接触,此时挡板408达到限制滑块406的滑动路径,防止滑块406与支撑杆405脱离接触的作用,当需要使用防护装置5时,分别将四个套管52套在四个矩形板51的表面后,向靠近定位板58的方向滑动套管52,套管52滑动会带动卡槽59的内壁沿定位板58的表面滑动,当卡槽59的内壁与定位板58的表面紧密接触后,将防护框54分别与四个卡板53相卡接,达到固定防护框54位置的作用,然后拉动挂钩56,挂钩56移动会拉伸弹性布55,此时弹性布55处于拉伸状态,在将挂钩56卡接在固定架57的表面后松开挂钩56,此时弹性布55开始收缩,挂钩56借助弹性布55的弹力会与固定架57紧密接触,达到固定挂钩56位置进而固定防护框54位置的作用。
36.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。