1.本发明涉及无人机起落架技术领域,特别涉及一种无人机防震起落架。
背景技术:
2.无人机起落架是无人机用以滑跑、停放的专门装置,需要承受无人机与地面接触产生的静载荷和动载荷,起支撑和保护机体的作用,起落架依靠缓冲器吸收着陆冲击能量,其性能的好坏对无人机起降性能有着决定性的影响。
3.中国发明专利cn112357067a公开了一种无人机防震起落架,解决了现有技术中无人机起落架多是刚性的,无法起到缓冲或者缓冲作用很小,无人机在进行紧急迫降时,不能有效对无人机起到一个很好的保护减震作用,进而影响了无人机的使用寿命,显得极为不便的问题。一种无人机防震起落架,包括无人机本体,无人机本体的底部设有承载板,承载板的顶部两侧均开设有凹槽,无人机本体的底部两侧均固定连接有连接板。本发明中提出的防震型起落架不仅可以对无人机本体起到减震保护,且利用凹槽内的构件可以实现多方位多角度的缓冲减震保护,同时利用滑套以及第一挤压弹簧的配合作用可以进行起落架底部的减震效果。
4.但是该设备针对起落架的设计主要集中在减震上面,采用传统的弹簧进行减震只适合于在较为平整的地面上降落,一旦降落的地面出现凹凸不平的情况时,利用上述结构在停靠无人机时会使其发生倾斜,严重时会导致无人机倾倒,从而损坏无人机。
5.因此,有必要提供一种无人机防震起落架解决上述技术问题。
技术实现要素:
6.本发明的目的在于提供一种无人机防震起落架,以解决上述背景技术中现有的问题。
7.为实现上述目的,本发明提供如下技术方案:一种无人机防震起落架,包括安装板和设置于安装板底部的上铰接杆和下铰接杆,所述安装板内部滑动连接有导向杆,所述上铰接杆和下铰接杆通过下铰接柱相铰接,所述上铰接杆和安装板之间通过上铰接杆相铰接;
8.所述下铰接杆外侧滑动设置有下滑杆,所述上铰接杆外侧滑动设置有上滑杆,所述下铰接柱与下铰接杆固定连接,同时下铰接柱贯穿上铰接杆并与上铰接杆转动连接,所述安装板底部位于上铰接杆两侧均固定连接有竖板,所述上铰接柱贯穿竖板并与竖板相固定,同时,上铰接柱贯穿上铰接杆并与上铰接杆转动连接。
9.具体使用时,当无人机在此凹凸不平的地面上降落时,其左侧的下铰接杆相对上铰接杆向上弯曲并之间与地面处于平行的状态,右侧的上铰接杆带动下滑杆与地面接触并一起向右侧转动,此时左侧弯曲的下铰接杆和右侧一同转动的上铰接杆和下铰接杆一同支撑着无人机降落,直至无人机降落过程完成,通过此结构能够很好地适应凹凸不平的地面,从而便于无人机的降落,如图10所示,为另一种降落状态,左侧的下铰接杆未完全落至地面
的凸起上,此时左侧的下铰接杆需要转动较大的角度,使得下铰接柱逐渐与地面接触,而右侧同样的上铰接杆带动下铰接杆接触地面并偏转,通过两者的配合完成无人机的降落,避免将其损坏。
10.作为本发明的进一步方案,所述安装板内部开设有导向槽,所述导向杆滑动连接于导向槽内部。
11.具体使用时,导向槽有利于导向杆的安装,实际操作时,导向槽为向上弯曲的弧形,有利于使得导向杆处于两侧上铰接杆的中间位置。
12.作为本发明的进一步方案,所述上铰接柱和下铰接柱上均设置有贯穿的通孔,所述上滑杆穿过通孔并与上铰接柱和下铰接柱滑动连接。
13.具体使用时,上铰接柱和下铰接柱上均设置有贯穿的通孔有利于与上滑杆配合,以便于控制上铰接杆和下铰接杆的连接状态,有利于无人机的降落。
14.作为本发明的进一步方案,所述上铰接杆和下铰接杆外侧均固定连接有连接座,上滑杆和下滑杆均贯穿连接座并与连接座滑动连接,所述下铰接杆外侧固定连接有限位板,所述限位板和连接座之间设置有第一弹簧,所述第一弹簧设置于下滑杆外侧。
15.具体使用时,连接座有利于上滑杆和下滑杆的安装,而第一弹簧可以提高下滑杆运动的稳定性。
16.作为本发明的进一步方案,所述上滑杆的顶端安装有强磁性的第三磁块,所述上滑杆的底端安装有与第三磁块相互排斥的第二磁块,所述上滑杆的顶端安装有第四磁块,所述导向杆靠近上滑杆的一端安装有第一磁块。
17.具体使用时,下滑杆受到地面挤压沿着连接座向上滑动,通过上滑杆顶端的第三磁块对下滑杆底端第二磁块的排斥力,可以驱使上滑杆压着连接座向上移动,当上滑杆向上移动时,通过第四磁块对导向杆一端第一磁块的排斥可以带动导向杆在导向槽内部向右滑动,此时当导向杆向右侧滑动时,通过其另一端的第一磁块对右侧上滑杆顶端第四磁块的排斥可以带动右侧的上滑杆沿着连接座向下滑动,从而使得右侧的上滑杆与上铰接柱之间脱离接触,此时上铰接杆与竖板之间的铰接状态被激活,使得上铰接杆能够以上铰接柱为中心进行转动,而当上滑杆向下滑动时其依然与下铰接柱相配合,从而将右侧的上铰接杆和下铰接杆锁死。
18.作为本发明的进一步方案,所述下铰接杆外侧固定连接有外护套,所述上铰接杆外侧固定连接有内滑套,所述外滑杆和内滑套均设置为弧形,并且外滑套和内滑套的圆心均与下铰接柱的圆心重合,所述外滑套内部空腔处设置有第二弹簧,第二弹簧置于外滑套和内滑套之间。
19.作为本发明的进一步方案,所述上铰接杆外侧顶端固定连接有外滑杆,所述安装板外侧固定连接有挡板,所述挡板底端固定连接有内滑杆,所述外滑杆和内滑杆均设置为弧形且其圆心均与上铰接柱圆心重合,所述外滑杆内部空腔处设置有第三弹簧,第三弹簧置于外滑杆和内滑杆之间。
20.具体使用时,当一侧的下滑杆落到地面的凸起上被向上折弯时,可以带动外滑套和内滑套相对转动,通过设置有第二弹簧可以提高外滑套与内滑套之间滑动的稳定性,并且当无人机起飞时,通过第二弹簧的弹力可以带动下铰接杆复位,有利于为后期降落做准备,而当右侧的上铰接杆转动时,可以带动上滑杆和下滑杆相对转动,而通过设置第三弹簧
其两者相对滑动的稳定性,并且通过第三弹簧可以对右侧上铰接杆进行阻挡,避免其无限制地向右侧转动,如图9所示,随着右侧上铰接杆转动的角度增大,第三弹簧对其的阻挡力增大,直至无人机完成降落,通过第三弹簧对上铰接杆的限位可以提高其对无人机支撑的稳定性。
21.作为本发明的进一步方案,所述安装板外侧设置有贯通的安装孔,安装孔上设置有紧固螺栓。
22.本发明所述的一种无人机防震起落架,当无人机在此凹凸不平的地面上降落时,其左侧的下铰接杆相对上铰接杆向上弯曲并之间与地面处于平行的状态,右侧的上铰接杆带动下滑杆与地面接触并一起向右侧转动,此时左侧弯曲的下铰接杆和右侧一同转动的上铰接杆和下铰接杆一同支撑着无人机降落,直至无人机降落过程完成,通过此结构能够很好地适应凹凸不平的地面,从而便于无人机的降落,如图10所示,为另一种降落状态,左侧的下铰接杆未完全落至地面的凸起上,此时左侧的下铰接杆需要转动较大的角度,使得下铰接柱逐渐与地面接触,而右侧同样的上铰接杆带动下铰接杆接触地面并偏转,通过两者的配合完成无人机的降落,避免将其损坏。
附图说明
23.下面结合附图和实施例对本发明进一步说明。
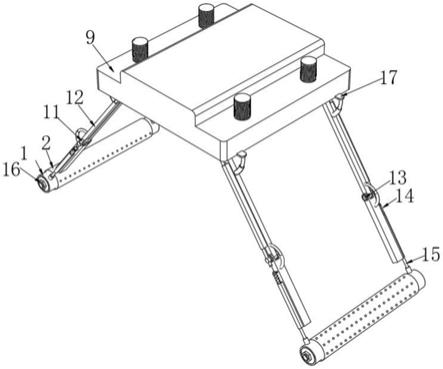
24.图1是本发明的整体结构示意图;
25.图2是本发明的立体结构示意图;
26.图3是本发明的上铰接杆和导向杆结构示意图;
27.图4是本发明的气囊和滑块连接结构示意图;
28.图5是本发明的上滑杆、下滑杆和连接座连接结构示意图;
29.图6是本发明图2的a处放大结构示意图;
30.图7是本发明图3的b处放大结构示意图;
31.图8是本发明图3的处放大结构示意图;
32.图9是本发明状态一下的使用场景图;
33.图10是本发明状态二下的使用场景图。
34.图中:1、转轴;2、滚筒;3、下铰接杆;4、外滑套;5、内滑套;6、上铰接杆;7、外滑杆;8、内滑杆;9、安装板;10、上铰接柱;11、上滑杆;12、连接座;13、下铰接柱;14、第一弹簧;15、下滑杆;16、进气管;17、挡板;18、第一磁块;19、导向杆;20、第二磁块;21、第三磁块;22、滑块;23、出气管;24、气囊;25、凸块;26、第四磁块;27、导向槽;28、往复丝杆。
具体实施方式
35.如图1-10所示,一种无人机防震起落架,包括安装板9,安装板9外侧设置有贯通的安装孔,安装孔上设置有紧固螺栓便于安装板9的安装,和设置于安装板9底部的上铰接杆6和下铰接杆3,下铰接杆3设置于上铰接杆6底端,并且在安装板9内部开设有导向槽27,导向槽27内部滑动连接有导向杆19,导向杆19置于上铰接杆6顶端,上铰接杆6底端和下铰接杆3顶端通过下铰接柱13相铰接,而上铰接杆6和安装板9之间通过上铰接杆6相铰接,上铰接柱10和下铰接柱13上均设置有贯穿的通孔。
36.进一步地,在下铰接杆3外侧滑动设置有下滑杆15,而上铰接杆6外侧滑动连接有上滑杆11,而上铰接杆6和下铰接杆3外侧均固定连接有连接座12,上滑杆11和下滑杆15均贯穿连接座12并与连接座12滑动连接。
37.在下铰接杆3的外侧还固定连接有限位板,限位板和连接座12之间设置有第一弹簧14,第一弹簧14设置于下滑杆15外侧。
38.实际安装时,下铰接柱13与下铰接杆3固定连接,同时下铰接柱13贯穿上铰接杆6并与上铰接杆6转动连接,安装板9底部位于上铰接杆6两侧均固定连接有竖板,上铰接柱10顶端置于相邻两个竖板之间,而上铰接柱10贯穿竖板并与竖板相固定,同时,上铰接柱10贯穿上铰接杆6并与上铰接杆6转动连接。
39.初始状态时,上铰接杆6与下铰接杆3处于同一直线上,并且上滑杆11底端穿过下铰接柱13上的通孔,此时由于下铰接柱13与下铰接杆3固定连接,因此通过上滑杆11的限位不能够转动下铰接杆3,同时,上滑杆11的顶端穿过上铰接柱10的通孔,由于上铰接柱10贯穿竖板并与竖板相固定,因此,上铰接杆6也不能够相对竖板转动,上铰接杆6和下铰接杆3均处于被锁定状态,彼此之间的铰接状态被锁定,此时上铰接杆6和下铰接杆3与传统无人机的起落架并无区别,能够对无人机进行支撑。
40.如图9-10所示,当无人机降落的地面凹凸不平时,传统的起落架在落地时便会失去平衡,导致无人机降落之后失去平衡,从而导致无人机有倾倒的可能,而本方案为避免上述问题,在下滑杆15的顶端安装有强磁性的第三磁块21,而上滑杆11的底端安装有与第三磁块21相互排斥的第二磁块20,在上滑杆11的顶端安装有第四磁块26,而导向杆19靠近上滑杆11的一端安装有第一磁块18。
41.使用时,以图9状态为例,当降落地存在凹凸不平情况时,安装板9底部左侧的下铰接杆3会率先接触到地面上凸起的部分,此时下滑杆15受到地面挤压沿着连接座12向上滑动,通过下滑杆15顶端的第三磁块21对上滑杆11底端第二磁块20的排斥力,可以驱使上滑杆11压着连接座12向上移动,当上滑杆11向上移动时,通过第四磁块26对导向杆19一端第一磁块18的排斥可以带动导向杆19在导向槽27内部向右滑动,此时当导向杆19向右侧滑动时,通过其另一端的第一磁块18对右侧上滑杆11顶端第四磁块26的排斥可以带动右侧的上滑杆11沿着连接座12向下滑动,从而使得右侧的上滑杆11与上铰接柱10之间脱离接触,此时上铰接杆6与竖板之间的铰接状态被激活,使得上铰接杆6能够以上铰接柱10为中心进行转动,而当上滑杆11向下滑动时其依然与下铰接柱13相配合,从而将右侧的上铰接杆6和下铰接杆3锁死,此时,如图9所示,左侧的上铰接杆6和下铰接杆3之间的铰接状态被激活,处于能够相对转动的状态,上铰接杆6和竖板之间的铰接状态依然被锁死,而右侧上铰接杆6与竖板之间的铰接状态被激活,能够相对转动,右侧上铰接杆6和下铰接杆3依然被锁死,因此,当无人机在此凹凸不平的地面上降落时,其左侧的下铰接杆3相对上铰接杆6向上弯曲,右侧的上铰接杆6带动下滑杆15与地面接触并一起向右侧转动,此时左侧弯曲的下铰接杆3和右侧一同转动的上铰接杆6和下铰接杆3一同支撑着无人机降落,直至无人机降落过程完成,通过此结构能够很好地适应凹凸不平的地面,从而便于无人机的降落,如图10所示,为另一种降落状态,左侧的下铰接杆3未完全落至地面的凸起上,此时左侧的下铰接杆3需要转动较大的角度,使得下铰接柱13逐渐与地面接触,而右侧同样的上铰接杆6带动下铰接杆3接触地面并偏转,通过两者的配合完成无人机的降落,避免将其损坏,
42.并且通过下滑杆15向上运动促使第三磁块21与第二磁块20的相靠近,通过两者的排斥力能够起到良好的减震效果。
43.同理,当右侧的下滑杆15率先落地时与上述过程相似。
44.而当降落地面较为平整时,两侧的下滑杆15接近同时落地,此时两侧的下滑杆15同时被挤压向上移动,使得上滑杆11有向上移动的趋势,而通过导向杆19两端的第一磁块18对两侧上滑杆11顶端的第四磁块26的排斥力,能够组件上滑杆11向上移动,从而避免上铰接杆6和下铰接杆3的铰接状态被激活,此时上铰接杆6与下铰接杆3之间、上铰接杆6和竖板之件的铰接状态均处于被锁死状态,相当于传统的起落架,能够完成无人机的降落。
45.在下滑杆15外侧设置有限位板,可以避免其与连接座12脱离,而第一弹簧14可以提高下滑杆15运动的稳定性。
46.进一步地,为了无人机起飞之后上铰接杆6和下铰接杆3之间能够进行复位,在下铰接杆3外侧固定连接有外护套,而上铰接杆6外侧固定连接有内滑套5,外滑杆7和内滑套5均设置为弧形,并且外滑套4和内滑套5的圆心均与下铰接柱13的圆心重合,使得内滑套5可以沿着外滑套4内的空腔滑动,而外滑套4内部空腔处设置有第二弹簧,第二弹簧置于外滑套4和内滑套5之间,在上铰接杆6外侧顶端固定连接有外滑杆7,而安装板9外侧固定连接有挡板17,挡板17底端固定连接有内滑杆8,外滑杆7和内滑杆8均设置为弧形且其圆心均与上铰接柱10圆心重合,使得内滑杆8可以沿着外滑杆7内的空腔滑动,而外滑杆7内部空腔处设置有第三弹簧,第三弹簧置于外滑杆7和内滑杆8之间。
47.使用时,当一侧的下滑杆15落到地面的凸起上被向上折弯时,可以带动外滑套4和内滑套5相对转动,通过设置有第二弹簧可以提高外滑套4与内滑套5之间滑动的稳定性,并且当无人机起飞时,通过第二弹簧的弹力可以带动下铰接杆3复位,有利于为后期降落做准备,而当右侧的上铰接杆6转动时,可以带动上滑杆11和下滑杆15相对转动,而通过设置第三弹簧其两者相对滑动的稳定性,并且通过第三弹簧可以对右侧上铰接杆6进行阻挡,避免其无限制地向右侧转动,如图9所示,随着右侧上铰接杆6转动的角度增大,第三弹簧对其的阻挡力增大,直至无人机完成降落,通过第三弹簧对上铰接杆6的限位可以提高其对无人机支撑的稳定性,并且通过选用不同弹力的第二弹簧使其对下铰接杆3和上铰接杆6的挤压力增大,有利于使得下铰接杆3转动一定角度之后保持静止,同理,选用弹性较大的第三弹簧使得上铰接杆6转动一定校对之后保持静止,通过两者的配合可以快速完成无人机的降落并提高其降落的稳定性,此外通过第二弹簧和第三弹簧还可以起到良好的减震效果。
48.如图2-4所示,下滑杆15的底端固定连接有转轴1,同一侧的两个转轴1之间设置有滚筒2,滚筒2的直径大于转轴1的直径,并且滚筒2与转轴1转动连接,滚筒2外侧面上设置有多个排气孔,而滚筒2内部滑动连接有滑块22,滑块22外侧固定连接有凸块25,在滚筒2的内侧壁上开设有与滑块22相配合的滑槽,滑块22滑动连接于滑槽内部,在滑块22的两侧均设置有气囊24,气囊24靠近滑块22的右端与滑块22相固定,另一端与滚筒2内一端部相固定,在气囊24外侧设置有出气管23,出气管23上设置有供气体单向排出的第一单向阀,气囊24远离滑块22的一端设置有进气管16,进气管16贯穿转轴1并延伸至转轴1的外侧,进气管16上设置有供气体单向进入的第二单向阀,在同侧两个转轴1之间固定连接有往复丝杆28,往复丝杆28外侧啮合有滚珠螺母副,滚珠螺母副贯穿滑块22并与滑块22固定连接,所述气囊24设置为环状,往复丝杆28从气囊24内侧的穿孔穿过。
49.使用时,由于滚筒2相对于转轴1直径更大,因此滚筒2会率先接触地面,当下滑杆15向外偏转时,可以带动滚筒2在地面上滚动,通过地面对滚筒2的摩擦力可以带动滚筒2转动,而滚筒2内壁的滑槽与滑块22外侧的凸块25相配合,使得滚筒2转动能够带动滑块22转动,从而带动滚珠螺母副转动,有利于带动滚珠螺母副在往复丝杆28上左右移动,当滑块22在滚筒2向一侧移动时,可以对一侧的气囊24进行挤压,从而将气囊24内部的气体通过出气管23排出,进而从滚筒2外侧的排气孔排出,此时滚筒2在外侧滚动的过程中通过排气孔排出的气体可以将地面上尖锐的石子等杂质吹走,一方面可以更加稳定地停靠无人机,避免停靠时滚筒2与石子接触产生震动,另一方面可以对滚筒2进行保护,延长其使用寿命,另一侧的气囊24体积增大通过进气管16可以向气囊24内补充气体。
50.工作原理:当降落地存在凹凸不平情况时,安装板9底部左侧的下铰接杆3会率先接触到地面上凸起的部分,此时下滑杆15受到地面挤压沿着连接座12向上滑动,通过上滑杆11顶端的第三磁块21对下滑杆15底端第二磁块20的排斥力,可以驱使上滑杆11压着连接座12向上移动,当上滑杆11向上移动时,通过第四磁块26对导向杆19一端第一磁块18的排斥可以带动导向杆19在导向槽27内部向右滑动,此时当导向杆19向右侧滑动时,通过其另一端的第一磁块18对右侧上滑杆11顶端第四磁块26的排斥可以带动右侧的上滑杆11沿着连接座12向下滑动,从而使得右侧的上滑杆11与上铰接柱10之间脱离接触,此时上铰接杆6与竖板之间的铰接状态被激活,使得上铰接杆6能够以上铰接柱10为中心进行转动,而当上滑杆11向下滑动时其依然与下铰接柱13相配合,从而将右侧的上铰接杆6和下铰接杆3锁死,此时,如图9所示,左侧的上铰接杆6和下铰接杆3之间的铰接状态被激活,处于能够相对转动的状态,上铰接杆6和竖板之间的铰接状态依然被锁死,而右侧上铰接杆6与竖板之间的铰接状态被激活,能够相对转动,右侧上铰接杆6和下铰接杆3依然被锁死,因此,当无人机在此凹凸不平的地面上降落时,其左侧的下铰接杆3相对上铰接杆6向上弯曲并之间与地面处于平行的状态,右侧的上铰接杆6带动下滑杆15与地面接触并一起向右侧转动,此时左侧弯曲的下铰接杆3和右侧一同转动的上铰接杆6和下铰接杆3一同支撑着无人机降落,直至无人机降落过程完成,通过此结构能够很好地适应凹凸不平的地面,从而便于无人机的降落,如图10所示,为另一种降落状态,左侧的下铰接杆3未完全落至地面的凸起上,此时左侧的下铰接杆3需要转动较大的角度,使得下铰接柱13逐渐与地面接触,而右侧同样的上铰接杆6带动下铰接杆3接触地面并偏转,通过两者的配合完成无人机的降落,避免将其损坏。