1.本实用新型属于无人机领域,尤其是涉及一种无人机机巢。
背景技术:
2.随着无线通信技术、航空遥感测绘技术、gps导航定位技术及自动控制技术的发展,无人机发展迅速,广泛应用于基础建设规划、线路巡查、应急响应、地形测量等多个领域。
3.无人机实现真正无人巡检的关键在于无人机机巢的应用,市面上现有的车载无人机移动机巢大多为手动更换飞机电池,手动放飞飞机的半自动化机巢,其自动化程度仍有提升的空间。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的缺点与不足,提供一种无人机机巢。
5.本实用新型一种实施例的无人机机巢,包括:
6.摆放架,所述摆放架设置有若干摆放层,所述摆放层设置有用于固定无人机的固定装置;
7.停机平台,所述停机平台设置在所述摆放架的前端;
8.归中装置,所述归中装置设置在所述停机平台上,所述归中装置用于将降落在所述停机平台的无人移动到所述停机平台的中轴线上;
9.抓取装置,所述抓取装置设置在所述停机平台上,所述抓取装置在所述摆放架和所述停机平台上移动;
10.升降装置,所述升降装置调节所述停机平台的高度。
11.本实用新型一种实施例的无人机机巢,设置有停机平台和升降装置,配合归中装置和抓取装置,能够实现将停放在停机平台上的无人机摆放到摆放架上,也能将摆放在摆放架的无人机取出并移动到停机平台上,实现无人机的自动摆放和取出。
12.在一优选或可选实施例中,所述固定装置包括引导轨道、前卡扣单元和后卡扣单元,所述引导轨道往所述摆放架的前端延伸,所述引导轨道的前端设置有开口,所述前卡扣单元设置在所述引导轨道的两侧,所述后卡扣单元设置在所述引导轨道的后端,所述后卡扣单元设置有对无人机进行充电的充电模块。
13.在一优选或可选实施例中,所述归中装置包括两第一导轨、两第二导轨、两推杆和归中驱动模组,两所述第一导轨设置在所述停机平台的前端,两所述第一导轨关于所述停机平台的中轴线对称设置,两所述第二导轨设置在所述停机平台的后端并平行于两所述第一导轨,两所述第二导轨关于所述停机平台的中轴线对称设置,两所述推杆分别位于所述停机平台的两侧,所述推杆的两端分别与所述第一导轨和所述第二导轨连接,所述归中驱动模组驱动两所述推杆靠近或远离所述停机平台的中轴线。
14.在一优选或可选实施例中,所述停机平台设置有导轨槽,所述导轨槽从所述停机
平台的前端延伸至所述停机平台的后端;
15.所述抓取装置包括两第三导轨、抓取座、锁紧装置和抓取驱动模组,两所述第三导轨设置在所述停机平台的底端,两所述第三导轨分别设置在所述导轨槽的两侧并平行于所述导轨槽,两所述第三导轨延伸至所述摆放架,所述抓取座设置在所述导轨槽上,所述抓取座的两端分别与两所述第三导轨连接,所述抓取座的后端设置有与无人机机脚相匹配的两卡位,所述锁紧装置设置在所述抓取座上,所述锁紧装置用于锁紧卡合在两所述卡位上的无人机机脚,所述抓取驱动模组驱动所述抓取座在所述第三导轨上移动。
16.在一优选或可选实施例中,所述锁紧装置包括紧锁电机、主动杆、两插销座、两从动杆和两连动杆,所述紧锁电机设置在所述抓取座上,所述主动杆的中端与所述紧锁电机的输出轴连接,两所述插销座分别设置在两所述卡位的内侧,两所述从动杆分别插设于两所述插销座,所述主动杆的两端分别通过两所述连动杆与两所述从动杆的端部连接。
17.在一优选或可选实施例中,所述摆放层在所述引导轨道的外侧设置有与所述抓取座相匹配的缺口部。
18.在一优选或可选实施例中,所述升降装置的数量为两个,所述升降装置分别位于所述停机平台的两侧,所述升降装置包括升降架、滑座和升降驱动模组,所述升降架设置有升降槽,所述滑座一端滑动嵌合于所述升降槽,所述滑座另一端与所述停机平台连接,所述滑座设置有贯穿其中部的限位孔,所述升降架还设置有限位板,所述限位板设置在所述升降槽上方并贯穿所述滑座的限位孔,所述限位板与所述限位孔限制所述滑座的位置,所述升降驱动模组驱动所述滑座在所述升降架上移动。
19.在一优选或可选实施例中,所述升降装置还包括安装架,所述安装架设置在所述升降架的侧端,所述安装架朝向所述停机平台的前端,所述安装架用于摆设电机驱动器。
20.在一优选或可选实施例中,所述无人机机巢还包括机舱,所述摆放架、所述停机平台和所述升降装置均设置在所述机舱内,所述机舱的前端设置有开口。
21.为了能更清晰的理解本实用新型,以下将结合附图说明阐述本实用新型的具体实施方式。
附图说明
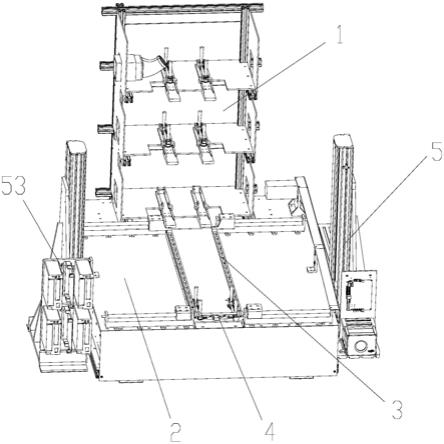
22.图1是本实用新型无人机机巢的结构示意图;
23.图2是本实用新型摆放架的结构示意图;
24.图3是本实用新型固定装置的结构示意图;
25.图4是本实用新型归中装置的结构示意图;
26.图5是本实用新型抓取装置的结构示意图;
27.图6是本实用新型锁紧装置的结构示意图;
28.图7是本实用新型升降装置的结构示意图;
29.图8是本实用新型升降架的结构示意图;
30.图9是本实用新型滑座的结构示意图;
31.图10是本实用新型机舱的结构示意图;
32.图11是本实用新型停机平台的结构示意图。
33.附图图例说明:1、摆放架;11、固定装置;12、引导轨道;13、前卡扣单元;14、后卡扣
单元;15、缺口部;2、停机平台;21、下平台;22、上平台;3、归中装置;31、第一导轨;32、第二导轨;33、推杆;4、抓取装置;41、第三导轨;42、抓取座;43、锁紧装置; 431、紧锁电机;432、主动杆;433、插销座;434、从动杆;435、连动杆;5、升降装置; 51、升降架;511、升降槽;512、限位板;52、滑座;521、限位孔;53、安装架;6、机舱; 7、无人机机脚。
具体实施方式
34.请参阅图1,图1是本实用新型无人机机巢的结构示意图。
35.本实施例提供的一种无人机机巢包括摆放架1、停机平台2、归中装置3、抓取装置4和升降装置5。所述停机平台2设置在所述摆放架1的前端,所述归中装置3设置在所述停机平台2上,所述抓取装置4设置在所述停机平台2上,所述升降装置5调节所述停机平台2 的高度。
36.请同时参阅图2和图3,图2是本实用新型摆放架的结构示意图,图3是本实用新型固定装置的结构示意图。
37.所述摆放架1设置有若干摆放层,具体地,所述摆放层的数量为三层。所述摆放层设置有用于固定无人机的固定装置11,每个所述摆放层都能摆放一架无人机,所述摆放层的层数取决于现场的安装空间和无人机的型号大小,本实用新型不作限制。所述固定装置11包括引导轨道12、前卡扣单元13和后卡扣单元14。所述引导轨道12往所述摆放架1的前端延伸,所述引导轨道12的前端设置有开口,所述开口的前端处设置有引导斜面,方便无人机机脚7 的对准插入。所述前卡扣单元13设置在所述引导轨道12的两侧,所述后卡扣单元14设置在所述引导轨道12的后端,所述后卡扣单元14设置有对无人机进行充电的充电模块,本实施例中,所述充电模块包括接充电端子和适配器,所述充电模块与外部电源进行电连接,无人机机脚7的端部设置有充电接口或者充电贴片,无人机机脚7的端部与所述后卡扣单元14卡合后所述充电模块对无人机机脚7的充电接口或者充电贴片进行充电,所述充电模块的型号和具体位置可根据具体的无人机型号进行适应性设置。在其他实施例中,所述充电模块也可以是无线充电装置。
38.所述停机平台2的顶端设置有停机位置,无人机降落在所述停机位置上。
39.请参阅图4,图4是本实用新型归中装置的结构示意图。
40.所述归中装置3设置在所述停机平台2上,所述归中装置3用于将降落在所述停机平台 2的无人移动到所述停机平台2的中轴线上。所述归中装置3包括两第一导轨31、两第二导轨32、两推杆33和归中驱动模组,两所述第一导轨31设置在所述停机平台2的前端,两所述第一导轨31关于所述停机平台2的中轴线对称设置,两所述第二导轨32设置在所述停机平台2的后端并平行于两所述第一导轨31,两所述第二导轨32关于所述停机平台2的中轴线对称设置,两所述推杆33分别位于所述停机平台2的两侧,所述推杆33的两端分别与所述第一导轨31和所述第二导轨32连接,所述归中驱动模组驱动两所述推杆33靠近或远离所述停机平台2的中轴线。在本实施例中,所述第一导轨31和所述第二导轨32上均设置有丝杆,所述丝杆均设置有滑块,所述推杆33的两端分别设置在所述第一导轨31上的滑块和所述第二导轨32上的滑块,实现滑块带动所述推杆33进行移动。在其他实施例中,所述归中驱动模块的具体结构可以根据实际需求来设计,所述归中驱动模块可以是旋转电机平移驱动模组、皮带平移模组、气缸平移驱动模组或直线电机平移驱动模组。
41.请同时参阅图5和图6,图5是本实用新型抓取装置的结构示意图,图6是本实用新型锁紧装置的结构示意图。
42.所述抓取装置4设置在所述停机平台2上,所述抓取装置4在所述摆放架1和所述停机平台2上移动,具体地,所述抓取装置4在所述摆放架1和所述停机平台2上前后方向上移动。
43.在本实施例中,所述停机平台2设置有导轨槽,所述导轨槽从所述停机平台2的前端延伸至所述停机平台2的后端。所述抓取装置4包括两第三导轨41、抓取座42、锁紧装置43 和抓取驱动模组,两所述第三导轨41设置在所述停机平台2的底端,两所述第三导轨41分别设置在所述导轨槽的两侧并平行于所述导轨槽,两所述第三导轨41延伸至所述摆放架1,延伸至所述摆放架1是为了实现所述抓取装置4的移动距离能够对接到所述摆放架1的固定装置11。所述抓取座42设置在所述导轨槽上,所述抓取座42的两端分别与两所述第三导轨 41连接,所述抓取座42的后端设置有与无人机机脚7相匹配的两卡位,所述锁紧装置43设置在所述抓取座42上,所述锁紧装置43用于锁紧卡合在两所述卡位上的无人机机脚7,所述卡位可设置有缓冲垫。所述抓取驱动模组驱动所述抓取座42在所述第三导轨41上移动。所述抓取驱动模组可以为丝杆驱动模组、旋转电机平移驱动模组、皮带平移模组、气缸平移驱动模组或直线电机平移驱动模组,所述第三导轨41根据实际需求可选择不同的本领域技术人员常用的导轨结构并且与所述抓取驱动模组进行匹配。在其他实施例中,所述抓取装置4 可以根据实际需求整体设置在所述停机平台2上,所述卡位的数量和形状根据不同型号的无人机进行适应性设计。
44.在本实施例中,所述锁紧装置43包括紧锁电机431、主动杆432、两插销座433、两从动杆434和两连动杆435,所述紧锁电机设置在所述抓取座42上,所述主动杆432的中端与所述紧锁电机的输出轴连接,两所述插销座433分别设置在两所述卡位的内侧,两所述从动杆434分别插设于两所述插销座433,所述主动杆432的两端分别通过两所述连动杆435与两所述从动杆434的端部连接。所述紧锁电机的输出轴驱动所述主动杆432,所述主动杆432 通过两所述连动杆435分别带动两所述从动杆434在两所述插销座433上移动,使得所述从动杆434限制位于所述卡位上的无人机机脚7,实现锁紧。在其他实施例中,所述紧锁装置可以是卡扣装置、磁合装置等本领域技术人员常用的锁紧结构。
45.所述摆放层在所述引导轨道12的外侧设置有与所述抓取座42相匹配的缺口部15,所述缺口部15为所述抓取座42在靠近所述引导轨道12时提供移动空间,防止所述抓取座42与所述摆放层发生碰撞。
46.请同时参阅图7至9,图7是本实用新型升降装置的结构示意图,图8是本实用新型升降架的结构示意图,图9是本实用新型滑座的结构示意图。
47.在本实施例中,所述升降装置5的数量为两个,所述升降装置5分别位于所述停机平台 2的两侧,所述升降装置5包括升降架51、滑座52和升降驱动模组。所述升降架51设置有升降槽511,所述滑座52一端滑动嵌合于所述升降槽511,所述滑座52另一端与所述停机平台2连接,所述滑座52可通过螺栓或者钩爪等本领域技术人员常用的连接方式与所述停机平台2进行连接。所述滑座52设置有贯穿其中部的限位孔521,所述升降架51还设置有限位板512,所述限位板512设置在所述升降槽511上方并贯穿所述滑座52的限位孔521,所述限位板512与所述限位孔521限制所述滑座52的位置,防止所述滑座52脱离所述升降架51,
增加安全性。所述升降驱动模组驱动所述滑座52在所述升降架51上移动,所述升降驱动模组可以通过皮带、丝杆等方式进行驱动。在其他实施例中,所述升降装置5的数量根据实际需求进行设计,所述升降装置5也可以设置在所述停机平台2的底端,所述升降装置5对所述停机平台2进行顶升。
48.所述升降装置5还包括安装架53,所述安装架53设置在所述升降架51的侧端,所述安装架53朝向所述停机平台2的前端,所述安装架53用于摆设电机驱动器,若干所述电机驱动器分别用于驱动所述归中驱动模组、所述锁紧装置43、所述抓取驱动模组和所述升降驱动模组。
49.请参阅图10,图10是本实用新型机舱的结构示意图。
50.所述无人机机巢还包括机舱6,所述摆放架1、所述停机平台2和所述升降装置5均设置在所述机舱6内,所述机舱6的前端设置有开口,所述开口为无人机提供进出口。所述机舱 6可以是由柔性材料组成,也可以由刚性材料组成,具体应根据应用场所进行设计。
51.优选地,所述停机平台2包括下平台21、上平台22和平台驱动模组,所述上平台22滑动设置在所述下平台21上,所述平台驱动模组驱动所述上平台22在所述下平台21上移动。在本实施例中,所述上平台22与所述下平台21通过伸缩滑轨进行滑动连接。在其他实施例中,所述上平台22与所述下平台21之间可以通过多节导轨以及滑动件进行连接,所述平台驱动模组由所述安装架53的电机驱动器进行驱动。
52.工作原理:无人机归巢时,所述停机平台2伸出,无人机通过rtk(real-time kinematic,实时动态)技术和视觉辅助实现无人机的起飞和精准降落,降落到所述停机平台2上,所述停机平台2收回,之后所述归中装置3利用两所述推杆33将无人机推到所述停机平台2的中轴线位置,然后所述抓取座42移动到无人机处并与无人机机脚7进行卡合,所述锁紧装置 43将无人机机脚7进行锁紧后,所述升降装置5将所述停机平台2移动到合适的所述摆放层,所述抓取座42将无人机移动到所述摆放层的固定装置11中进行固定,然后所述固定装置11 对无人机进行充电。无人机出巢时,所述升降装置5将所述停机平台2移动到合适的所述摆放层,然后所述抓取座42移动到无人机机脚7处并卡合,所述锁紧装置43将无人机机脚7 进行锁紧后,所述抓取座42将无人机移动到所述停机平台2的中部,所述停机平台2伸出,所述锁紧装置43解锁,所述抓取座42远离无人机,最后无人机准备起飞。
53.本实用新型一种实施例的无人机机巢,设置有停机平台和升降装置,配合归中装置和抓取装置,能够实现将停放在停机平台上的无人机摆放到摆放架上,也能将摆放在摆放架的无人机取出并移动到停机平台上,实现无人机的自动摆放和取出。
54.本实用新型的无人机机巢还具备以下的技术效果:
55.1、能同时放置若干台无人机,增加作业效率;
56.2、设置有对无人机进行充电的充电模块,实现无人机不间断循环作业;
57.3、设置有抓取装置和摆放架,实现无人机的作业和收纳的功能;
58.4、设置有升降装置,实现若干无人机的交替作业。
59.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动或变形不脱离本实用新型的精神和范围,倘若这些改动和变形属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变形。