1.本发明涉及智能机器人领域,具体涉及一种高速智能交通监管飞行机器人。
背景技术:
2.智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉,除具有感受器外,它还有效应器,作为作用于周围环境的手段,这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来,由此也可知,智能机器人至少要具备三个要素:感觉要素,反应要素和思考要素,其中在高速交通监管过程中,需要使用到飞行机器人对高速行驶的车辆的车速进行监测。
3.但是其在实际使用时,由于飞行机器人在使用过程中电量不足以制成飞行机器人全天对高速行驶的车辆进行监测,需要人工对飞行机器人进行更换电池等,在更换电池的过程中无法对实时对高速行驶的车辆进行监测。
4.因此,发明一种高速智能交通监管飞行机器人来解决上述问题很有必要。
技术实现要素:
5.本发明的目的是提供一种高速智能交通监管飞行机器人,通过导电柱,当飞行器本体电量降低到最低飞行标准时,飞行器本体飞到定位柱的上方,然后降落,使导电柱与连接槽连接对飞行器本体进行充电,由于支撑柱的顶部设置有多个定位柱,可以同时对多个飞行器本体进行充电,从而可以对高速行驶的车辆进行实时监控,以解决技术中的上述不足之处。
6.为了实现上述目的,本发明提供如下技术方案:一种高速智能交通监管飞行机器人,包括支撑柱和飞行器本体,所述述支撑柱顶部的外壁设置有转轴,所述转轴内部设置有连接杆,所述连接杆一端设置有太阳能板,所述支撑柱两端焊接有定位柱,所述定位柱顶部的内部开设有安装槽,所述安装槽内壁开设有辅助槽,所述辅助槽内部设置有导向轴,所述安装槽内部设置有复位弹簧,所述复位弹簧顶部设置有升降块,所述升降块顶部设置有导电柱,所述升降块外壁设置有转动杆,所述转动杆与升降块转动连接,所述转动杆内部开设有滑槽,所述转动杆一端设置有升降杆,所述定位柱顶部焊接有连接板,所述连接板顶部焊接有限位板,所述限位板外壁开设有弹簧槽,所述弹簧槽内部设置有定位弹簧,所述定位弹簧一端设置有凸块,所述飞行器本体设置于限位板的外壁。
7.优选的,所述转轴的数量设置为两个,两个所述转轴对称分布于支撑柱的水平中心线的两侧,所述转轴与连接杆过盈连接。
8.优选的,所述导向轴与滑槽滑动连接,所述滑槽的内壁与导向轴的外壁贴合,所述滑槽的数量设置为四个,四个所述滑槽环形阵列于定位柱的外壁。
9.优选的,所述升降杆与连接板滑动连接,所述升降杆的外壁与连接板底部的管穿孔的内壁贴合。
10.优选的,所述飞行器本体包括飞行器外壳、扇叶、监控摄像头、连接槽、辅助环和定
位槽,所述飞行器外壳设置于定位柱的顶部,所述飞行器外壳顶部设置有扇叶,所述飞行器外壳一端的内部设置有监控摄像头,所述飞行器外壳底部的中间设置有连接槽,所述飞行器外壳底部的外壁设置有辅助环,所述辅助环内壁开设有定位槽。
11.优选的,所述定位槽的纵截面为二分之一圆形,所述定位槽与凸块卡合连接。
12.在上述技术方案中,本发明提供的技术效果和优点:
13.1、通过导电柱,当飞行器本体电量降低到最低飞行标准时,飞行器本体飞到定位柱的上方,然后飞行器本体底部的辅助环与限位板贴合对飞行器本体进行固定之后飞行器本体向下移动,从而使升降杆带动向下移动之后带动导电柱与飞行器本体底部的连接槽连接,从而对飞行器本体进行充电,由于支撑柱的顶部设置有多个定位柱,可以同时对多个飞行器本体进行充电,从而可以对高速行驶的车辆进行实时监控;
14.2、通过太阳能板,太阳能板可以对定位柱内的蓄电池进行充电,同时也可以与市政电网进行连接,从而避免了断电之后无法对飞行器本体进行充电,然后可以旋转太阳能板使太阳能板始终与太阳对齐。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
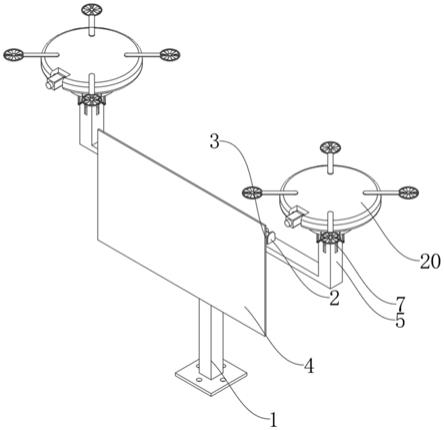
16.图1为本发明的立体图;
17.图2为本发明的立体剖面图;
18.图3为本发明的飞行器本体立体图;
19.图4为本发明的图2中a处局部放大图。
20.附图标记说明:
21.1、支撑柱;2、转轴;3、连接杆;4、太阳能板;5、定位柱;6、安装槽; 7、辅助槽;8、导向轴;9、复位弹簧;10、升降块;11、导电柱;12、转动杆;13、滑槽;14、升降杆;15、连接板;16、限位板;17、弹簧槽;18、定位弹簧;19、凸块;20、飞行器本体;2001、飞行器外壳;2002、扇叶;2003、监控摄像头;2004、连接槽;2005、辅助环;2006、定位槽。
具体实施方式
22.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
23.本发明提供了如图1-4所示的一种高速智能交通监管飞行机器人,包括支撑柱1和飞行器本体20,所述述支撑柱1顶部的外壁设置有转轴2,所述转轴2内部设置有连接杆3,所述连接杆3一端设置有太阳能板4,所述支撑柱1两端焊接有定位柱5,所述定位柱5顶部的内部开设有安装槽6,所述安装槽6内壁开设有辅助槽7,所述辅助槽7内部设置有导向轴8,所述安装槽6内部设置有复位弹簧9,所述复位弹簧9顶部设置有升降块10,所述升降块10顶部设置有导电柱11,所述升降块10外壁设置有转动杆12,所述转动杆12与升降块10转动连接,所述转动杆12内部开设有滑槽13,所述转动杆12一端设置有升降杆14,所述定位柱5顶部焊接有连接板15,所述连接板15顶部焊接有限位板16,所述限位板16外壁开设有弹簧槽17,所
述弹簧槽17内部设置有定位弹簧18,所述定位弹簧18一端设置有凸块 19,所述飞行器本体20设置于限位板16的外壁。
24.进一步的,在上述技术方案中,所述转轴2的数量设置为两个,两个所述转轴2对称分布于支撑柱1的水平中心线的两侧,所述转轴2与连接杆 3过盈连接,通过转轴2可以对太阳能板4的角度进行调整,从而使太阳能板4始终与太阳对齐,便于对支撑柱1内的蓄电池进行充电。
25.进一步的,在上述技术方案中,所述导向轴8与滑槽13滑动连接,所述滑槽13的内壁与导向轴8的外壁贴合,所述滑槽13的数量设置为四个,四个所述滑槽13环形阵列于定位柱5的外壁,所述升降杆14与连接板15 滑动连接,所述升降杆14的外壁与连接板15底部的管穿孔的内壁贴合,当升降杆14受到飞行器本体20的力之后会向下移动,从而使升降杆14的一端对转动杆12的一端进行挤压,然后转动杆12与升降杆14连接的一端向下移动,转动杆12与升降块10连接的一端向下移动,从而使升降块10 顶部的导电柱11向上移动与飞行器本体20底部的连接槽2004贴合对飞行器本体20进行充电。
26.进一步的,在上述技术方案中,所述飞行器本体20包括飞行器外壳2001、扇叶2002、监控摄像头2003、连接槽2004、辅助环2005和定位槽2006,所述飞行器外壳2001设置于定位柱5的顶部,所述飞行器外壳2001顶部设置有扇叶2002,所述飞行器外壳2001一端的内部设置有监控摄像头 2003,所述飞行器外壳2001底部的中间设置有连接槽2004,所述飞行器外壳2001底部的外壁设置有辅助环2005,所述辅助环2005内壁开设有定位槽2006,所述定位槽2006的纵截面为二分之一圆形,所述定位槽2006 与凸块19卡合连接,通过定位槽2006可以防止飞行器外壳2001在充电的过程中掉落。
27.本实用工作原理:
28.参照说明书附图1-4,当需要同时飞行机器人对高速行驶的车辆进行交通监管时,首先沿着高速的路边安装支撑柱1,通过螺栓将支撑柱1安装之后,然后将支撑柱1内的电线与市政电网连接,之后旋转太阳能板4对太阳能板4 的角度进行调整,从而使太阳能板4可以正对着太阳,然后启动飞行器本体 20,使飞行器本体20内的扇叶2002旋转,扇叶2002带动飞行器外壳2001 升起,之后飞行器外壳2001对监控摄像头2003的角度进行调整,使监控摄像头2003正对着高速公路,对高速公路正在行驶的车辆进行交通监管;
29.参照说明书附图1-4,在飞行器外壳2001长时间飞行之后,飞行器外壳 2001内的蓄电池电量达到最低标准之后,定位柱5顶部另外一组飞行器本体 20起飞,对高速进行交通监管,然后电量最低的飞行器本体20飞到定位柱5 的正上方之后向下移动,使飞行器本体20底部的辅助环2005与限位板16贴合,然后飞行器外壳2001继续向下移动,使辅助环2005内的定位槽2006与连接板15外壁的凸块19贴合,定位弹簧18推动凸块19向外移动,从而对飞行器本体20进行固定,在飞行器本体20向下移动的过程中,飞行器外壳2001 底部与升降杆14顶部贴合并推动升降杆14向下移动,由于升降杆14与连接板15滑动连接,升降杆14的外壁与连接板15底部管穿孔的内壁贴合,使升降杆14可以垂直向下移动,然后升降杆14推动与升降杆14连接的转动杆12 的一端向下移动,之后转动杆12内的滑槽13在导向轴8的外壁滑动,转动杆 12的另一端向上翘起,带动升降块10向上移动,同时升降块10带动复位弹簧9拉伸,之后升降块10带动导电柱11向上移动使导电柱11插入到飞行器外壳2001底部的连接槽2004内部对飞行器外壳2001内的蓄电池进行充电。
30.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。