1.本发明涉及铝合金薄材钣金工艺领域,特别涉及一种四引擎嵌入式铝构件飞行姿态转换无人机。
背景技术:
2.随着社会的不断发展,随着5g通信和北斗导航的大量使用,随着5g手机人手一个的今天,借助北斗导航以及5g通信和手机app技术,使其无人机的快捷性和方便性包括在空中巡检和快速抵达现场包括快递小件送到方面都显示出了良好的运用前景。但直升飞机是有短板,即效率低,电池消耗大;如果能开发出在频繁的巡检和空中悬停包括物件派送方面的续航能力则更好,毕竟电池充电会造成大的延时,耽搁,令人不快。
3.设想一下,目前无人机是用向上的力克服重力实现引擎飞行的话,如果扩展出用翼展-及投影面积用空气浮力/或升力/实现续航飞行的话,就显现出在交通巡检和物件派送飞行中,如同飞机一样,续航效力得到了倍增,意义很大,这也是我们需要深入研发地方。
技术实现要素:
4.鉴于上述,本发明的目的旨在提供一种四引擎嵌入式铝构件姿态转换无人机,通过无人机飞行姿态转换,用带有翼展-及投影面积所获前进方向上的空气浮力/或升力,实现节能或符合时效续航能力。进一步的,对于飞行姿态转换用铝合金薄材钣金工艺实现的无人机工作主件,来满足创新和优化的特点;重要的是在该装置在用铝合金比强度高的特点,性能、外观、强度的情况下,最大限度情况下实现了轻量化的目的。进一步,钣金工艺制备主件显著降低其生产流程和加工难度,使得生产成本得到了很好的控制。进一步的,为了减小迎面风阻,中心平台与姿态转换机构和电机的有机整合,使得机体结构紧凑;进一步的,也就是说很好的解决了可靠性、稳定性,安装和检修等指标。
5.为实现上述目的,本发明提供一种四引擎嵌入式铝构件飞行姿态转换无人机,其特征在于,包括:平台组,用于所述飞行姿态转换电机和第三、第四引擎驱动电机的嵌入,本体在飞行状态时也用作为浮力/或升力提升;机翼组,用于飞行状态的转换包括投影面积的扩大,像飞机翅膀一样用作为浮力/或升力提升;尾翼组,用于飞行姿态稳定和调整包括投影面积的扩大,像飞机尾翼一样用作为水平和转弯控制;引擎组,用于驱动起飞和飞行时的姿态转换;吊装体,用于摄像机的安装包括水平和垂直调节/或物件的递送。
6.优选的,所述的飞行姿态转换无人机,其特征在于,所述平台组包括:所述平台组,两侧内置机翼姿态控制电机,用于同步带动机翼在水平和垂直之间变换,实现起飞升空和飞行状态的变换;以及
后部同轴内置尾翼姿态控制电机,用于带动各自尾翼在超水平和垂直之间变换,实现起飞和飞行状态时在空位置的高度和方位调节。
7.优选的,所述的飞行姿态转换无人机,其特征在于,所述引擎驱动电机包括:所述引擎驱动电机,安装在两机翼前段中部的引擎驱动电机和安装在平台前端的第三、第四引擎驱动电机,用于完成垂直和前进方向的驱动,以现实垂直起飞和巡航飞行。
8.优选的,所述的飞行姿态转换无人机,其特征在于,所述吊装体包括:所述吊装体包括,用于吊装摄像机或快递物件,以完成巡航包括空中悬停中对地面拍摄或物件的投送。
9.优选的,所述的飞行姿态转换无人机,其特征在于,所述吊装体还包括:所述吊装体包括:用于飞行的锂电池、飞行控制电路、姿态传感电路包括高度和方向、5g或gps定位电路等。
10.优选的,所述的飞行姿态转换无人机,其特征在于,所述吊装体还包括:所述吊装体中有带减速器电机,用于摄像机的水平和垂直方向的转换,以完成巡视中的前进的障碍图形识别和地面的拍摄。
11.本发明提供的四引擎嵌入式铝合金构建飞行姿态转换无人机,通过对装置各部件的优化和模块化设计,尤其大部分部件均可通过钣金工艺制成,实现了轻量化,降低了工艺难度和制造成本。进一步的,该无人机以平台组为中心,姿态变换电机都嵌于平台中包括第三、第四引擎驱动电机,充分彰显了结构简单,易于检查和维修特点。显见,该无人机成本低,结构强度有保障,廉易于实现,可进行大批量生产。最重要的它的很好的适应性和实用性,可以很好的推进该无人机的普及和应用。
附图说明
12.通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚,在附图中:图1为本发明第一实施例飞行姿态转换无人机巡航姿态时的装备示意图;图2为本发明第一实施例飞行姿态转换无人机垂直起飞时的装备示意图;图3为本发明第一实施例飞行姿态转换无人机平台结构示意图;图4为本发明第一实施例飞行姿态转换无人机机翼组装备示意图;图5为本发明第一实施例飞行姿态转换无人机尾翼装备示意图;图6为本发明第一实施例飞行姿态转换无人机引擎组结构示意图;图7为本发明第一实施例飞行姿态转换无人机平台组装配示意图;图8为本发明第一实施例飞行姿态转换无人机吊装体结构示意图;图9为本发明第二实施例飞行姿态转换无人机吊装体结构示意图;图10为本发明第二实施例飞行姿态转换无人机巡航姿态时的装备示意图;图11为本发明第二实施例飞行姿态转换无人机垂直起飞时的装备示意图;具体实施方案以下将参照附图更详细地描述本发明的各种实施例。在各个附图中,相同的元件采用相同或类似的附图标记来表示。为了清楚起见,附图中的各个部分没有按比例绘制。
13.但是本发明并不仅仅限于这些实施例。在下文对本发明的细节描述中,详尽描述
了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。为了避免混淆本发明的实质,公知的方法、过程、流程没有详细叙述。
14.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
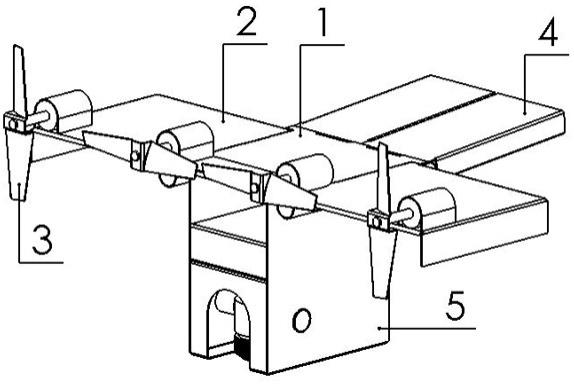
15.图1为本发明实施例飞行姿态转换无人机巡航状态时的装备示意图;图中无人机包括:平台组1、机翼组2、四引擎组3、尾翼组4、吊装体5。平台组1,呈矩形薄片状,作为主件,放置在中心位置;该件是用是用铝合金薄材钣金工艺制作,用于嵌入和胶粘姿态控制电机,并能在飞行状态时由于风道存在附带产生迎风浮力/或升力。嵌入在机翼中的第一、第二引擎驱动电机,通过机翼的展开,所形成质量中心前移,在两叶片中心的连线的轴线上,实现了在空旋转,以完成飞行姿态的转换;嵌入在平台上的第三、第四引擎驱动组,共同操作,有利于起飞时的垂直度,对质心的偏置不敏感,减少对场地的要求。两侧有机翼组2,用铰链方式与平台1实现动态连接;机翼姿态控制电机22(图中未显示,见图7)嵌入和胶粘在平台上的凸缘内,当机翼姿态控制电机工作时能控制机翼组在水平和垂直面上转动,实现姿态巡航飞行和垂直起飞飞行姿态的转换;即通过翼展的扩大投影面积方式,产生飞行时的浮力/或升力,使得驱动的需求力下降,巡航飞行加长。后端有尾翼组4 ,同样用铰链方式与平台1动态连接;尾翼姿态控制电机42(图中未显示,见图7)嵌入和胶粘在平台上的凸缘内,当尾翼姿态控制电机分别工作时,能控制尾翼组在垂直面上到大于水平面的转动,实现姿态巡航飞行的水平方面的平衡和转向,也包括附带扩大产生飞行时的浮力/或升力作用。在平台下有吊装体5,用胶粘/或热风焊接的方式连接在平台组1上,在平台与吊装体之间留有风道,以便平台以及尾翼产生飞行时的浮力/或升力的附加。
16.图2为本发明第一实施例飞行姿态转换无人机垂直起飞时的结构示意图;处于垂直起飞状态,是由:平板组1、机翼组2、四引擎驱动组3、尾翼组4、吊装体5。由图可见,是由四引擎组驱动组制式;起飞前机翼(包括引擎驱动组)、尾翼都处于紧缩状态,体型如箱体,缩小了投影面积,便于垂直起飞的能耗。对比图1,当机翼(包括尾翼)展开时,质心前移,在第一、第二两叶片轴心的连线上形成在空旋转,即形成飞行姿态的转换。可选的,在机翼或吊装体上部,可设置把手,便于携带。可选的,中心平台用注塑/或压力铝铸造,一次成型,工艺更简单。
17.图3为本发明第一实施例无人机平台结构示意图;如图所示,平板11(反扣状)作为主件,是用铝合金薄材钣金工艺制作。在该件上三面上有褶边形成的凸缘a11,形成包含轴承的铰链结构,用于机翼和尾翼的铰接。上部前段两侧凸缘有圆孔,用于机翼姿态控制电机胶粘的平行插入;在凸缘间在装备上包含有轴承的垫块,形成铰链支撑结构,用于机翼包括姿态控制电机的轴线与平台间无障碍转动,即带动机翼从与平台垂直到水平之间的转换,实现起飞到巡航的姿态转换。同样,下部凸缘两侧有圆孔,用于机翼姿态控制电机胶粘的对称插入;在凸缘间有包含有轴承垫块的铰链支撑结构,用于尾翼包括姿态控制电机的轴线与平台间无障碍转动,即带动尾翼从与平台从垂直到过水平之间的转换,实现起飞到巡航的姿态转换的水平控制。平台间有圆弧切口,便于机翼和尾翼的无障碍运动;在前部有褶边b11处理,以提高板材的结构强度;中部凹陷处以涂胶/或热风焊接与吊挂体连接;上部背面铝合金褶边形成的两凸缘,胶粘或热风焊接在平台上,用于第三、第四引擎驱动电机嵌入,形成驱动。
18.根据本发明上述第一实施例提供的中心平台,作为基础构件,是用铝合金薄材钣
金工艺完成;凸缘断面与平面链接缝可用热风焊和褶边处理,工艺简单,实现便捷,在轻量化时保证强度。姿态控制电机有机的嵌入或粘连在凸缘中,无外挂(不包括吊挂件),一体化结构,简洁可靠。可选的,中心平台用注塑和压力铝铸造,一次成型,工艺更简单。
19.图4为本发明第一实施例飞行姿态转换无人机机翼组装备示意图;由图,机翼21放置在平台两侧,是用铝合金薄材钣金工艺制作。在该件上有凸缘b21用于铰链平台动态连接。在凸缘内涂胶插入垫块25,在垫块上中心有孔,孔中留有平面,用于插入机翼姿态控制电机轴体时,形成平面衔接,带动同步转动。有预留弧形槽口c21便于机翼姿态控制电机滑动嵌入,并与平台粘接,形成定轴转动。机翼呈薄片状,以减小截面引起的风阻,其中,在顶端转角结构d21,似飞机尾翼,能起到稳流作用,对飞行巡航中对抗风有利。在后中部有第一、第二引擎驱动电机凸缘座32,嵌入于平台上的冲压孔内,突出处折弯处理,实现固定;用于引擎驱动电机涂胶嵌入,形成一体结构。在两侧褶边处理,以提高机翼结构强度。
20.根据本发明第一实施例飞行姿态转换无人机机翼组,是用铝合金薄材钣金工艺完成;凸缘褶边的断面与平面链接缝可用热风焊和两侧折边断面处理,工艺简单,实现便捷,在轻量化时保证强度。姿态控制电机和引擎驱动电机有机的嵌入或粘连在凸缘中,无外挂(不包括吊挂件),一体化结构,简洁可靠。可选的,中心平台用注塑和压力铝铸造,一次成型,工艺更简单。
21.图5为本发明第一实施例飞行姿态转换无人机尾翼装备示意图;由图,尾翼41放置在平台后侧,是用铝合金薄材钣金工艺制作。该件在上部有凸缘a41,用于铰链与平台动态连接;在凸缘上插入垫块45,垫块中心孔内留有平面,用于插入尾翼姿态控制电机42轴插入,形成平面衔接,带动尾翼转动;有预留弧形槽口b41,用于与平台固定的姿态控制电机涂胶嵌入,自由转动;在两侧有折弯和折边形成的转角结构c41,用于结构的强度提高,利于在巡航状态时,似飞机尾翼,能起到稳流抗风作用。
22.根据本发明第一实施例飞行姿态转换无人机尾翼组,是用铝合金薄材钣金工艺完成;凸缘褶边的断面与平面链接缝可用热风焊和两侧折边断面处理,工艺简单,实现便捷,在轻量化时保证强度。姿态控制电机有机的嵌入在凸缘垫块中,无外挂(不包括吊挂件),一体化结构,简洁可靠。可选的,中心平台用注塑和压力铝铸造,一次成型,工艺更简单。
23.图6为本发明第一实施例飞行姿态转换无人机引擎组装配示意图;由图,引擎组是由驱动电机31、凸缘座32、叶片33组成。以引擎姿态控制电机中心,涂胶插入在机翼两侧凸缘座孔内并形成固定;当引擎姿态控制电机31转动时,通过输出轴形成叶片33的转动,实现驱动向前力。
24.根据本发明上述实施飞行姿态转换无人机例提供的引擎组,宜用高效电机例如无刷电机实现;由于引擎驱动电机插入在机翼上,结构简洁。
25.图7为本发明第一实施例飞行姿态转换无人机平台组装配示意图;由图,在装备体上配置有:平台11,机翼姿态控制电机22,机翼支撑轴承23,机翼支撑轴承垫块24,尾翼姿态控制电机42,尾翼支撑轴承43,尾翼支撑轴承垫块44等。上部两侧凸缘孔内涂胶插入机翼姿态控制电机22(以长轴代指),其他凸缘孔内嵌入轴承23和轴承垫块24,用作活动支撑,实现机翼姿态转换。同样,后端两侧凸缘孔内涂胶对称插入尾翼姿态控制电机42和中部包括轴承43的垫块44,用于机翼姿态控制,实现尾翼对飞行巡航高度和方向的适时控制。所有引擎驱动电机31涂胶插入在相应凸缘座32内孔,由叶片33完成驱动。
26.根据本发明第一实施例提供的平台组装配示意图可见,姿态控制电机和引擎驱动电机都集成在平台上,且姿态控制电机与减速器一体化集成,结构简练,无外挂(不包括吊装体),对飞行状态时的阻力减小非常有利。
27.图8为本发明第一实施例飞行姿态转换无人机吊装体结构示意图;由图,吊装体51安装在平台下方,是用铝合金薄材钣金工艺完成。上部留有空气流通通道,下部有电源盒54。再下部有空间,用于视频探头和电路的安装。后端下部有设有带减速器电机传动组52,用于视频探头53在水平和垂直方向的转动,满足前进方向和俯视摄像。在上部平面与平台涂胶/或热熔粘连;两侧有保留的薄壁体,似飞机尾翼,在飞行时有整流作用,对巡航状态时的飞行稳定非常有利。
28.根据本发明上述实施例飞行姿态转换无人机提供的吊装体,是用铝合金薄材钣金工艺完成,显现工艺简单,实现便捷;用比强度高的铝合金制作,实现了的轻量化。在风道下部电源盒和下前部空间用于放置锂电池、控制电路包括基本的飞行控电路、位置传感、5g视频传送电路或gps定位电路等。
29.图9为本发明第二实施例飞行姿态转换无人机吊装体装备示意图;由图,该装备包括:箱体51、控制电机55,、下卸板56、面板57、电源盒58等。该吊装体,安装在平台下方,由铝合金薄材经剪切、折弯、褶边等钣金工艺完成。前部留有风道,用于平台在巡航状态时产生浮力/或升力和稳流作用。在上部有内藏空间,用于放置电池和控制电路等。后部面板57上有通心轴,用于面板掀起,存放快件。后侧控制电机55和下卸板54共同作用,用于完成快递物件的低空下货或人工接货。
30.图10为本发明第二实施例飞行姿态转换无人机巡航状态时的结构示意图;由图可见,外形特征与图1相像的扩大版,在此不做介绍。
31.图11为本发明第二实施例飞行姿态转换无人机起飞状态时的结构示意图;由图可见,外形特征与图2相像的扩大版,在此不做介绍。
32.综上所述,本发明的实施例一种四引擎飞行姿态转换无人机,具有明显的结构紧缩特征和飞行状态时的机翼展开特征,使得飞行时的能耗大幅度降低,巡航能力有了必要的强化。主件是系铝合金薄板钣金工艺制备,得到很好的优化包括轻量化化结构,使得了结构简练,对整体的制成带来了方便,也使成本得到了很好的控制。嵌于平台的姿态控制电机对引擎、机翼、尾翼控制带来了很好的有机配合,体积减小;同时,对引擎和尾翼的分别控制,加强了飞行姿态的很好的把控。总之四引擎飞行姿态转换无人机易于实现且可进行大批量生产,可以进一步推进无人机技术的普及和应用。
33.以上所述仅为本发明的优选第一实施例、第二例实施例并不用于限制本发明,对于本领域技术人员而言,本发明可以有各种改动和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之。