1.本实用新型属于农业施药技术领域,具体是无人机对靶精准施药系统。
背景技术:
2.目前农用无人机技术在水生蔬菜病虫害防治方面还存在着低空飞行稳定性差且自动化程度低、续航时间短、载药量少、无人机施药速率与飞行速度和高度不匹配、施药不均匀和雾滴粒径大以及农田信息难以准确获取等问题,而实际农业生产中需要提升水生蔬菜病虫害飞防作业效率,提高农药有效利用率,减少农药使用量,控制和逐步降低农业生态环境污染。
技术实现要素:
3.本实用新型针对现有水生蔬菜农田信息难以获取、无人机低空飞行稳定性差且自动化程度低、续航时间短、载药量少、无人机施药速率与飞行速度和高度不匹配,以及施药不均匀和雾滴粒径大等缺点,提供一种无人机超声气力对靶精准施药系统,以开展农情信息的获取工作,还可以在不破坏水生蔬菜农田环境的情况下代替普通施药机具或者工作人员进行施药作业,降低劳动强度,提升水生蔬菜智能化、精细化生产水平。
4.实现本实用新型目的的技术解决方案为:
5.本实用新型的目的是提供无人机对靶精准施药系统,包括:旋翼无人机、固定在旋翼无人机下端的机架;所述机架设有三层安装板,从上向下依次设有电源模块、气液控制模块、供液模块;所述旋翼无人机旋翼杆件端部(下侧)设有超声气力喷头的位姿调节模块,用于调整超声气力喷头的周向旋转和上下俯仰的位姿;所述供液模块用于为设置在位姿调节模块上的超声气力喷头供应药液;所述气液控制模块用于对超声气力喷头供应气压,并控制液量和喷速;所述旋翼无人机旋翼杆件上设有作物信息采集模块,用于采集作物信息;所述电源模块用于旋翼无人机、气液控制模块、供液模块、超声气力喷头的位姿调节模块、作物信息采集模块的供电。
6.进一步的,所述位姿调节模块包括第一舵机、第二舵机;所述第一舵机固定在对应的旋翼杆件端部下侧,所述第二舵机与第一舵机的转轴相连,第二舵机的转轴与第一舵机的转轴呈空间垂直状态,超声气力喷头与第二舵机的转轴相连,第一舵机用于控制超声气力喷头周向旋转,第二舵机用于控制超声气力喷头俯仰转动。
7.进一步的,所述作物信息采集模块包括热红外成像仪、多光谱相机、rgb相机;所述热红外成像仪、多光谱相机、rgb相机依次固定在旋翼杆件上。
8.进一步的,所述供液模块包括液箱、水泵;所述液箱下端设有药液出口,药液出口与水泵相连。所述气液控制模块包括电液比例调节阀、气泵、电控比例压力阀;所述水泵、电液比例调节阀通过液管与超声气力喷头连接;所述气泵、电控比例压力阀通过气管与超声气力喷头连接。
9.进一步的,还设有位置采集模块,应用获取旋翼无人机的位置信息。所述位置采集
模块包括测距雷达和避障红外感应传感器,所述避障红外感应传感器设置在旋翼无人机旋翼杆端部,所述测距雷达设置在机架上。
10.进一步的,所述旋翼无人机为四旋翼无人机。
11.具体使用时:
12.喷施操作由小型气泵、小型水泵、电液比例调节阀、电控比例压力阀、液位传感器和超声气力喷头共同实现,其中液箱、小型水泵、电液比例调节阀和超声气力喷头依次通过液管连接,以供给施药系统药液;小型气泵、电控比例压力阀和超声气力喷头依次通过气管连接,向系统提供气压;根据作物信息和无人施药机飞行位置,控制系统通过控制器向小型水泵、小型气泵、电液比例调节阀、电控比例压力阀、第一舵机和第二舵机传达指令信息,控制喷施元件的运行,小型气泵、小型水泵分别实现气体和药液的运动,电液比例调节阀控制液量,电控比例压力阀控制喷速;
13.第一舵机和第二舵机组合控制四旋翼无人施药机超声气力喷头的运动,首先第一舵机周向旋转,在横向调节第二舵机与超声气力喷头的位置,第二舵机在竖直方向上与第一舵机的转轴相连,第二舵机的转轴与第一舵机的转轴呈空间垂直状态,超声气力喷头通过固件与第二舵机的转轴相连,第二舵机的转轴转动,在纵向调节超声气力喷头的位置,组合实现超声气力喷头的多角度调节以及施药范围的控制。
14.本实用新型与现有技术相比,其显著优点是:
15.本实用新型可使喷洒雾滴比常规植保药械飘移少,大幅提高农药有效利用率,减少用药量,控制和逐步降低农业生态环境污染,有效保障农产品安全,还可提高农业产业发展质量和效益,减少农业环境污染。
附图说明
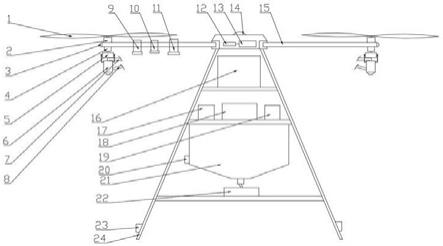
16.图1为无人机对靶精准施药系统正视图;
17.图2为无人机对靶精准施药系统俯视图;
18.图中:旋翼1、旋翼电机2、避障红外感应传感器3、第一舵机4、第二舵机5、超声气力喷头6、气管7、液管8、热红外成像仪9、多光谱相机10、rgb相机11、飞控12、控制器13、警示灯14、旋翼杆件15、电源16、电液比例调节阀17、小型气泵18、电控比例压力阀19、液位传感器20、液箱21、小型水泵22、测距雷达23、机架24。
具体实施方式
19.下面结合附图及具体实施例对本实用新型做进一步的介绍。
20.如图1-2所示,无人机对靶精准施药系统,空间上如图2所示由上至下分为四层,第一层包括旋翼杆件15,固定于其边缘的旋翼电机2,旋翼1与旋翼电机2驱动连接,第一舵机4位于旋翼电机2对面且固定于旋翼杆件15端部下侧,第二舵机5在竖直方向上与第一舵机4的转轴相连,超声气力喷头6通过固件与第二舵机5的转轴相连,旋翼杆件15最边缘置有避障红外感应传感器3,在飞行方向上,四根旋翼杆件15中的两根由边缘向内,上面固定着热红外成像仪9、多光谱相机10、rgb相机11,中间位置放置飞控12、控制器13和警示灯14;第二层包括电源16;第三层包括电液比例调节阀17、小型气泵18、电控比例压力阀19;第四层包括液箱21,在液箱21下方8侧边安装液位传感器20,药液出口在液箱21下方,并与小型水泵
22相连;在机架24的最下方安装雷达23。
21.如图1-2所示,无人机对靶精准施药系统,电源16向系统电器元件旋翼电机2、避障红外感应传感器3、第一舵机4、第二舵机5、热红外成像仪9、多光谱相机10、rgb相机11、飞控12、控制器13、警示灯14、电液比例调节阀17、小型气泵18、电控比例压力阀19、液位传感器20、小型水泵22和雷达23提供正常运行所需电量。
22.在前期准备阶段,分成健康组和虫害组,通过热红外成像仪9、多光谱相机10、rgb相机11获取两组水生蔬菜的生长信息,通过机器学习的方式构建水生蔬菜病态识别模型与病虫害预测模型,并将模型置于水生蔬菜病虫害飞防作业系统中。
23.在实际飞防作业中,将热红外成像仪9、多光谱相机10、rgb相机11实时采集到的水生蔬菜生长信息数据传入控制系统中;无人施药机飞行位置通过飞控12与测距雷达23和避障红外感应传感器3获取和控制,并与控制系统双向数据交流;无人机喷头组施药范围根据第一舵机4和第二舵机5与气管7、液管8的位置配合提前分析确定,并将施药范围数据传输到控制系统中;喷施操作由小型气泵18、小型水泵22、电液比例调节阀17、电控比例压力阀19、液位传感器20和超声气力喷头6共同实现,其中液箱21、小型水泵22、电液比例调节阀17和超声气力喷头6依次通过液管8连接,以供给施药系统药液,小型气泵18、电控比例压力阀19和超声气力喷头6依次通过气管7连接,向系统提供气压,根据作物信息和无人施药机飞行位置,控制系统通过控制器13向小型水泵22、小型气泵18、电液比例调节阀17、电控比例压力阀19、第一舵机4和第二舵机5传达指令信息,控制喷施元件的运行,小型气泵18、小型水泵22分别实现气体和药液的运动,电液比例调节阀17控制液量,电控比例压力阀19控制喷速;
24.第一舵机4和第二舵机5组合控制四旋翼无人施药机超声气力喷头6的运动,首先第一舵机4周向旋转,在横向调节第二舵机5与超声气力喷头6的位置,第二舵机5在竖直方向上与第一舵机4的转轴相连,第二舵机5的转轴与第一舵机4的转轴呈空间垂直状态,超声气力喷头6通过固件与第二舵机5的转轴相连,第二舵机5的转轴转动,在纵向调节超声气力喷头6的位置,组合实现超声气力喷头6的多角度调节以及施药范围的控制;
25.液位传感器20检测液量,当液量不足时,喷施操作停止,对系统起到保护的作用,所有状态与控制系统实时交互;控制器13为水生蔬菜病虫害飞防作业系统实际载体;以水生蔬菜病虫害飞防作业系统为中心,实现实时信息数据处理与任务调度,达到实时变量与精准施药的目的,最终提高水生蔬菜病虫害飞防效率,减轻环境污染。无人施药机系统运行的过程中,除施药相关操作外,无人施药机的运行状态对施药也产生重要影响。系统根据雷达23获得的距离信息通过飞控12调节无人施药机的位姿与速度,便于在准确的位置以正确的状态进行施药工作;在飞行过程中也可以通过红外感应传感器3检测是否碰到障碍物并以警示灯14提醒,实现有效避障,防止飞行故障的发生。
26.本实用新型构思清晰,工作原理清晰,依据水生蔬菜病虫害飞防系统,解决目前水生蔬菜病虫害防治难以机械化作业问题,提高有效用药量≥10%,降低劳动强度,提升水生蔬菜高效化、精细化生产水平,为我国农业生产提供优质、安全、便捷的作业保障。