1.本发明涉及可动翼飞行器和飞行机器人领域,特别是一种四同步平行四边形传动卷帘旋转翼无人机。
背景技术:
2.飞行器飞行方式有固定翼、旋翼和扑翼三种飞行类型,旋翼和扑翼都属于可动翼。
3.扑翼飞行是自然界飞行生物采用的飞行方式,主要利用双翅的上下扑动同时产生升力和推力,其主要特点是将举升、悬停和推进功能基于一体,同时具有很强的机动性和灵活性,更适合于执行绕过障碍物等的飞行。对于小尺寸和低速飞行状态的飞行器,属于低雷诺数下飞行,扑翼产生的非定常升力比固定翼的定常升力大得多;从推力方面来看,扑翼推进效率比螺旋桨推进效率高。目前扑翼飞行器研究主要集中在模拟大自然中飞行生物的飞行姿态设计各种扑翼机构。但这些扑翼机构的共同问题是总体气动效率偏低,甚至低于同尺度的固定翼微型飞行器。扑翼飞行器总体效率低下的主要原因是目前研究中大多是简单的仿造鸟类或昆虫翅膀的外形和扑动运动,却很难实现飞行生物扑翼上下扑动过程中利用翼翅自身姿态和结构的改变减小空气阻力并产生非定常气动力,由此产生的气动效率较低问题严重制约了扑翼式飞行器的普及应用。
4.旋翼飞行是以旋翼(包括螺旋桨)的拉力提供飞行器的升力,飞行器的前进拉力来源于旋翼矢量的小角度偏转所产生的水平分量。目前发展迅速的多旋翼小型飞行器的姿态控制和水平运动是靠多旋翼的差动拉力来实现的。旋翼飞行器的特点是具有垂直起降和空中悬停功能,并具有在比较小的区域中飞行的能力。但由于旋翼飞行器的旋翼相对于其旋翼中心轴是不动的,因此前进阻力较大,所以能量消耗大,气动效率偏低,大功率长航时飞行较为困难。
技术实现要素:
5.本发明的目的是提供一种非常显著的减小扑翼型和旋翼型飞行器飞行阻力大、提升气动效率、方便实现垂直起降、平飞推力较大、飞行灵活性和机动性较好的四同步平行四边形传动卷帘旋转翼无人机,以解决现有技术中存在的上述问题。
6.实现本发明目的的技术解决方案是:
7.一种四同步平行四边形传动卷帘旋转翼无人机,其特征在于包括旋转帘翼、第二减速器、电动机、旋转轴和机身框架,机身框架两侧对称的布置有两个竖直方向的旋转轴,机身框架前后对称的布置有两个水平的旋转轴,设置在机身框架上的四个电动机分别通过设置在机身框架上的四个第二减速器减速后分别带动四个旋转轴连续旋转,四个旋转帘翼分别固定连接在四个旋转轴上,左右两个旋转帘翼用于产生推力,前后两个旋转帘翼用于产生升力,旋转帘翼包括旋转框架,以及安装在旋转框架内的卷帘,旋转框架内还设置有平行四边形机构以及驱动电机,用于控制卷帘的展开和收缩,旋转框架包括中心孔、直梁、导轨、平行四边形机构、实心卷帘安装梁和电机安装框架,直梁的方向与中心孔的轴线平行,
直梁的轴线与实心卷帘安装梁的轴线平行;卷帘安装在直梁和实心卷帘安装梁上;四个旋转轴分别连接四个中心孔和四个分别设置在飞行器上的第二减速器;卷帘上有卷帘迎风面、卷帘背风面和卷帘通孔,驱动电机安装在电机安装框架上,平行四边形机构包括第一控制曲柄、控制连杆和第二控制曲柄,第一控制曲柄插装在实心卷帘安装梁上,第二控制曲柄插装在直梁上,导轨插装在实心卷帘安装梁和直梁上;还包括销轴,第一控制曲柄和第二控制曲柄通过销轴连接控制连杆,还包括设置在飞行器上的四个电动机,四个电动机的输出轴分别安装在四个第二减速器输入孔内,旋转框架还设置有第一减速器,驱动电机的输出轴安装在第一减速器的输入孔内,旋转框架上还包括用于加强旋转框架的强度的外加强曲梁和内加强曲梁中的至少一种,直梁、外加强曲梁和内加强曲梁均为空心结构且采用工程塑料、碳素纤维等轻质材料。
8.本发明的工作原理是:当电动机启动正向旋转时,经过减速器减速后带动旋转轴连续转动,而在驱动电机的控制下,第一控制曲柄开始运动,带动第二控制曲柄工作,从而使得实心卷帘安装梁与直梁的运动保持同步,使卷帘随着控制曲柄的正反转进行展开与收缩,每当卷帘转动到最高竖直状态时,驱动电机工作,将卷帘拉伸到最大面积,并且保持这个状态从最高竖直状态旋转至最低竖直状态,此时卷帘与气流方向垂直,气流直接作用在卷帘正面上使卷帘获得最大的气体推动力,气流作用在卷帘迎风面上的正压力可分解为升力和推力,此时为工作状态,而当卷帘从最低竖直位置转动到最高竖直位置的过程中,驱动电机开始工作,控制第一控制曲柄反向转动,使卷帘收缩,气流直接从卷帘通孔处流出,回到复位状态;当电机反向旋转时,旋转帘翼装置产生的气体反推动力与电动机正向旋转时反向。当两个水平安装的旋转帘翼电动机转速相同,并且两个竖直安装的旋转帘翼电动机不工作时,即可实现垂直起降功能,若两个水平安装的旋转帘翼产生的升力与整机重量和阻力相等时,则可实现空中悬停;当两个竖直安装的旋转帘翼电机转速相同时,左右两侧的旋转帘翼产生的推力一样,因此飞行器前飞,并且两侧旋转帘翼产生的力矩大小相等、方向相反,因此飞行器整体力矩是平衡的,气体布局很合理,当两个电机转速不相同时,左右两侧的旋转帘翼产生的推力不一样,则飞行器可以实现拐弯功能。
9.本发明与现有技术相比,其显著优点是:
10.1.本发明所述的四同步平行四边形传动卷帘旋转翼无人机,通过将旋转帘翼中的卷帘设置为连续旋转,保持了旋翼连续旋转的优点,克服了扑翼需要往复运动的弱点。
11.2.本发明所述的四同步平行四边形传动卷帘旋转翼无人机,通过电机控制连续旋转的卷帘相对于中心旋转轴转动,使卷帘在工作状态时以最大面积迎风运动获得最大气动力,而在复位状态时,气流直接从卷帘通孔处流出从而阻力大大降低,达到提高气动效率的目的,其气动效率远高于现有旋翼和扑翼飞行器。
12.3.本发明所述的四同步平行四边形传动卷帘旋转翼无人机,卷帘在工作状态与复位状态之间的切换是在驱动电机控制下,平行四边形机构带动完成,结构简单、控制精度高且可靠性好。
13.4.本发明所述的四同步平行四边形传动卷帘旋转翼无人机,两个水平放置的旋转帘翼控制升力大小,两个竖直放置的旋转帘翼控制推力,能方便实现垂直起降、空中悬停、快速拐弯,因此该类型无人机的灵活性和机动性较好,可广泛应用于低雷诺数飞行的各类小型飞行器和无人机中。
14.5.本发明所述的四同步平行四边形传动卷帘旋转翼无人机,结构简单,加工工艺性好,生产成本低。
附图说明
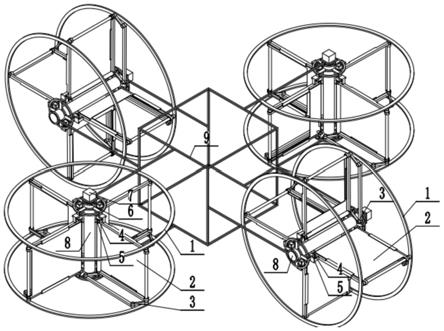
15.图1是本发明的四同步平行四边形传动卷帘旋转翼无人机的整体结构示意图。
16.图2是本发明的四同步平行四边形传动卷帘旋转翼无人机只安装一个水平放置旋转帘翼和一个竖直放置旋转帘翼时的详细结构示意图。
17.图3是本发明的四同步平行四边形传动卷帘旋转翼无人机的旋转帘翼复位状态详细结构示意图。
18.图4是本发明的四同步平行四边形传动卷帘旋转翼无人机的旋转帘翼工作状态详细结构示意图。
19.图5是本发明的四同步平行四边形传动卷帘旋转翼无人机的旋转框架的结构示意图。
20.图6是本发明的四同步平行四边形传动卷帘旋转翼无人机的卷帘的结构示意图。
具体实施方式
21.下面结合附图对本发明作进一步描述,但不以任何方式限制本发明。
22.实施例1:结合图1、图2、图3、图4、图5和图6,采用四同步平行四边形传动卷帘旋转翼无人机的高压电线巡检无人机。包括旋转帘翼、第二减速器6、电动机7、旋转轴8和机身框架9,机身框架9两侧对称的布置有两个竖直方向的旋转轴8,机身框架9前后对称的布置有两个水平的旋转轴8,设置在机身框架9上的四个电动机7分别通过设置在机身框架9上的四个第二减速器6减速后分别带动四个旋转轴8连续旋转,四个旋转帘翼分别固定连接在四个旋转轴8上,左右两个旋转帘翼用于产生推力,前后两个旋转帘翼用于产生升力,旋转帘翼包括旋转框架1,以及安装在旋转框架1内的卷帘2,旋转框架1内还设置有平行四边形机构以及驱动电机5,用于控制卷帘2的展开和收缩,旋转框架1包括中心孔101、直梁102、导轨103、平行四边形机构、实心卷帘安装梁107和电机安装框架108,直梁102的方向与中心孔101的轴线平行,直梁102的轴线与实心卷帘安装梁107的轴线平行;卷帘2安装在直梁102和实心卷帘安装梁107上;四个旋转轴8分别连接四个中心孔101和四个分别设置在飞行器上的第二减速器6;卷帘2上有卷帘迎风面201、卷帘背风面202和卷帘通孔203,驱动电机5安装在电机安装框架108上,平行四边形机构包括第一控制曲柄104、控制连杆105和第二控制曲柄106,第一控制曲柄104插装在实心卷帘安装梁107上,第二控制曲柄106插装在直梁102上,导轨103插装在实心卷帘安装梁107和直梁102上;还包括销轴3,第一控制曲柄104和第二控制曲柄106通过销轴3连接控制连杆105,还包括设置在飞行器上的四个电动机7,四个电动机7的输出轴分别安装在四个第二减速器6输入孔内,旋转框架1还设置有第一减速器4,驱动电机5的输出轴安装在第一减速器4的输入孔内,旋转框架1上还包括用于加强旋转框架1的强度的外加强曲梁109和内加强曲梁110中的至少一种,直梁102、外加强曲梁109和内加强曲梁110均为空心结构且采用工程塑料、碳素纤维等材料。高压电线巡检无人机采用本发明四同步平行四边形传动卷帘旋转翼无人机后,由于旋转帘翼阻力小、气动效率高,能完成各项检测和拍照工作,相对于旋翼无人机,在搭载摄影设备等相同的工作载荷后,一次
飞行时间增加20%,实现了较长航时工作。
23.实施例2:结合图1、图2、图3、图4、图5和图6,采用四同步平行四边形传动卷帘旋转翼无人机的高层灭火专用无人机。包括旋转帘翼、第二减速器6、电动机7、旋转轴8和机身框架9,机身框架9两侧对称的布置有两个竖直方向的旋转轴8,机身框架9前后对称的布置有两个水平的旋转轴8,设置在机身框架9上的四个电动机7分别通过设置在机身框架9上的四个第二减速器6减速后分别带动四个旋转轴8连续旋转,四个旋转帘翼分别固定连接在四个旋转轴8上,左右两个旋转帘翼用于产生推力,前后两个旋转帘翼用于产生升力,旋转帘翼包括旋转框架1,以及安装在旋转框架1内的卷帘2,旋转框架1内还设置有平行四边形机构以及驱动电机5,用于控制卷帘2的展开和收缩,旋转框架1包括中心孔101、直梁102、导轨103、平行四边形机构、实心卷帘安装梁107和电机安装框架108,直梁102的方向与中心孔101的轴线平行,直梁102的轴线与实心卷帘安装梁107的轴线平行;卷帘2安装在直梁102和实心卷帘安装梁107上;四个旋转轴8分别连接四个中心孔101和四个分别设置在飞行器上的第二减速器6;卷帘2上有卷帘迎风面201、卷帘背风面202和卷帘通孔203,驱动电机5安装在电机安装框架108上,平行四边形机构包括第一控制曲柄104、控制连杆105和第二控制曲柄106,第一控制曲柄104插装在实心卷帘安装梁107上,第二控制曲柄106插装在直梁102上,导轨103插装在实心卷帘安装梁107和直梁102上;还包括销轴3,第一控制曲柄104和第二控制曲柄106通过销轴3连接控制连杆105,还包括设置在飞行器上的四个电动机7,四个电动机7的输出轴分别安装在四个第二减速器6输入孔内,旋转框架1还设置有第一减速器4,驱动电机5的输出轴安装在第一减速器4的输入孔内,旋转框架1上还包括用于加强旋转框架1的强度的外加强曲梁109和内加强曲梁110中的至少一种,直梁102、外加强曲梁109和内加强曲梁110均为空心结构且采用工程塑料、碳素纤维等材料。高层灭火专用无人机采用本发明四同步平行四边形传动卷帘旋转翼无人机后,由于旋转帘翼工作行程推力大、阻力小、气动效率高,因此有较强的机动性,能快速响应高层的紧急情况,快速飞行到高层失火点进行灭火。