1.本实用新型涉及一种货运无人机,特别是一种货运无人机舱内货物运输装置。
背景技术:
2.随着智能物流的快速发展,大型货运无人机也随之应运而生。目前,国内的大型货运无人机,最大起飞重量3.4吨,货仓容积10立方米,有效载荷达1.5吨,货运商载能力国内外首屈一指;其巡航速度为313公里/时,续航时间长达8小时、航程2183公里,实用升限可达6098米,即使在陆运交通不发达及多山的西部、高海拔地区,也可高效完成点对点的货运支线运输;此外,该型无人机在同级别的飞机中具有惊人的起降能力,满载货物时200米内即可完成起飞和着陆,能够在未铺筑的简易跑道甚至是土坡、草地上起降运行,解决了高海拔、山区等难以抵达地区的起降问题。但是,由于大型货运无人机货物重量大,很难人工在舱内移动,且一般货仓内装满货物后留给人工操作的空间不足,导致货仓内装卸货不方便。因此,现有的技术存在着货物装卸不方便的问题。
技术实现要素:
3.本实用新型的目的在于,提供一种货运无人机舱内货物运输装置。本实用新型具有货物装卸方便的特点。
4.本实用新型的技术方案:货运无人机舱内货物运输装置,包括设置在无人机货仓底面的横向导轨,且横向导轨与无人机货仓仓门相对应,横向导轨侧面设有多条平行分布的纵向导轨,纵向导轨的高度高于横向导轨的高度;所述横向导轨上设有接料小车,接料小车上方设有与纵向导轨相对应的送料小车,送料小车上方设有物料托盘,送料小车和物料托盘之间设有升降顶升液压缸;所述纵向导轨的两侧设有货物支撑架,两个纵向导轨之间设有与物料托盘相配合的通行槽。
5.前述的货运无人机舱内货物运输装置中,所述接料小车包括接料车架,接料车架下方设有与横向导轨相配合的横向滚轮,接料车架上方远离纵向导轨的一侧设有纵向驱动液压缸,纵向驱动液压缸侧面设有位于接料车架上表面的对接导轨,且对接导轨与纵向导轨相配合;所述横向导轨的内端还设有固定于无人机货仓底面的横向驱动液压缸,横向驱动液压缸的输出端与接料车架相固定。
6.前述的货运无人机舱内货物运输装置中,所述送料小车包括送料车架,送料车架底部设有与对接导轨相配合的轴向滚轮,送料车架的一端与纵向驱动液压缸的输出端相连;升降顶升液压缸固定于送料车架的上表面。
7.前述的货运无人机舱内货物运输装置中,所述物料托盘靠近纵向导轨的一端还设有升降式挡板;所述物料托盘上设有用于安装升降式挡板的安装槽,安装槽内底面设有电磁铁,安装槽两对称侧壁上设有t型槽;所述升降式挡板两侧设有与t型槽相对应的t型块,升降式挡板底面设有磁铁,磁铁和电磁铁之间设有复位弹簧。
8.与现有技术相比,本实用新型通过在无人机货仓的底面设置与无人机货仓仓门相
对应的横向导轨,在横向导轨上设置接料小车,便于将货物转移至货仓内,然后通过设置送料小车和纵向导轨,并在每个纵向导轨的两侧设置货物支撑架,完成将货物运输至指定位置并堆放的工作,通过上述结构之间的相互配合,搬运工人只需在仓门处上料即可,无需进入货仓内运输货物,极大的方便了货物的装卸,也能够提高装卸效率,降低工人的劳动强度。本实用新型通过在物料托盘的端部设置升降式挡板,防止物料在运输过程中发生纵向的偏移,减少对货物堆放的影响。综上所述,本实用新型具有货物装卸方便的特点。
附图说明
9.图1是本实用新型的结构示意图;
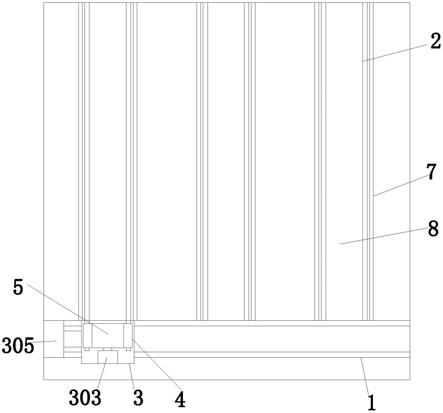
10.图2是本实用新型的侧视图;
11.图3是图2的局部放大图;
12.图4是升降式挡板的俯视图。
13.附图标记:1-横向导轨,2-纵向导轨,3-接料小车,4-送料小车,5-物料托盘,6-升降顶升液压缸,7-货物支撑架,8-通行槽,9-升降式挡板,10-复位弹簧,301-接料车架,302-横向滚轮,303-纵向驱动液压缸,304-对接导轨,305-横向驱动液压缸,401-送料车架,402-轴向滚轮,501-安装槽,502-电磁铁,503-t型槽,901-t型块,902-磁铁。
14.下面结合附图和具体实施方式对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。
具体实施方式
15.本实用新型的实施例:货运无人机舱内货物运输装置,构成如图1至图4所示,包括设置在无人机货仓底面的横向导轨1,且横向导轨1与无人机货仓仓门相对应,横向导轨1侧面设有多条平行分布的纵向导轨2,纵向导轨2的高度高于横向导轨1的高度;所述横向导轨1上设有接料小车3,接料小车3上方设有与纵向导轨2相对应的送料小车4,送料小车4上方设有物料托盘5,送料小车4和物料托盘5之间设有升降顶升液压缸6;所述纵向导轨2的两侧设有货物支撑架7,两个纵向导轨2之间设有与物料托盘5相配合的通行槽8。
16.优选的,接料小车3包括接料车架301,接料车架301下方设有与横向导轨1相配合的横向滚轮302,接料车架301上方远离纵向导轨2的一侧设有纵向驱动液压缸303,纵向驱动液压缸303侧面设有位于接料车架301上表面的对接导轨304,且对接导轨304与纵向导轨2相配合;所述横向导轨1的内端还设有固定于无人机货仓底面的横向驱动液压缸305,横向驱动液压缸305的输出端与接料车架301相固定。
17.优选的,送料小车4包括送料车架401,送料车架401底部设有与对接导轨304相配合的轴向滚轮402,送料车架401的一端与纵向驱动液压缸303的输出端相连;升降顶升液压缸6固定于送料车架401的上表面。
18.优选的,物料托盘5靠近纵向导轨2的一端还设有升降式挡板9;所述物料托盘5上设有用于安装升降式挡板9的安装槽501,安装槽501内底面设有电磁铁502,安装槽501两对称侧壁上设有t型槽503;所述升降式挡板9两侧设有与t型槽503相对应的t型块901,升降式挡板9底面设有磁铁902,磁铁902和电磁铁502之间设有复位弹簧10。通过设置升降式挡板,利用电磁铁和磁铁之间的吸附作用,可以在货物运输时,将升降式挡板升起,防止货物移
动;完成堆放后,升降式挡板在电磁铁的吸附作用下,下降至安装槽内,升降式挡板的顶部与安装槽顶部齐平。
19.物料托盘的宽度小于货物底盘的宽度。
20.所述货物支撑架固定在纵向导轨的侧面。
21.本实用新型的货物装载过程:接料小车在接料驱动液压缸的驱动作用下,移动至无人机货仓仓门处,升降顶升液压缸将物料托盘顶升至高于货物支撑架的上方位置,然后通过工人将货物放置在物料托盘上,通过接料小车,将货物转移至相应的纵向导轨处,随后通过送料小车将货物移动至相应的堆放位置,升降顶升液压缸复位,将物料托盘降至通行槽下方,使得货物与物料托盘相分离,完成货物的堆放,完成将货物堆放在货物支撑架的工作。
22.横向驱动液压缸工作,带动接料车架和横向滚轮沿着横向导轨移动,当移动至相应的纵向导轨处,横向驱动液压缸停止工作,纵向驱动液压缸开始工作,将送料小车推入相应的纵向导轨,使得送料小车沿着纵向导轨移动至相应的堆放位置,随后升降顶升液压缸复位,物料托盘下降,使得货物底盘与货物支撑架相接触,完成货物的堆放。
技术特征:
1.货运无人机舱内货物运输装置,其特征在于:包括设置在无人机货仓底面的横向导轨(1),且横向导轨(1)与无人机货仓仓门相对应,横向导轨(1)侧面设有多条平行分布的纵向导轨(2),纵向导轨(2)的高度高于横向导轨(1)的高度;所述横向导轨(1)上设有接料小车(3),接料小车(3)上方设有与纵向导轨(2)相对应的送料小车(4),送料小车(4)上方设有物料托盘(5),送料小车(4)和物料托盘(5)之间设有升降顶升液压缸(6);所述纵向导轨(2)的两侧设有货物支撑架(7),两个纵向导轨(2)之间设有与物料托盘(5)相配合的通行槽(8)。2.根据权利要求1所述的货运无人机舱内货物运输装置,其特征在于:所述接料小车(3)包括接料车架(301),接料车架(301)下方设有与横向导轨(1)相配合的横向滚轮(302),接料车架(301)上方远离纵向导轨(2)的一侧设有纵向驱动液压缸(303),纵向驱动液压缸(303)侧面设有位于接料车架(301)上表面的对接导轨(304),且对接导轨(304)与纵向导轨(2)相配合;所述横向导轨(1)的内端还设有固定于无人机货仓底面的横向驱动液压缸(305),横向驱动液压缸(305)的输出端与接料车架(301)相固定。3.根据权利要求2所述的货运无人机舱内货物运输装置,其特征在于:所述送料小车(4)包括送料车架(401),送料车架(401)底部设有与对接导轨(304)相配合的轴向滚轮(402),送料车架(401)的一端与纵向驱动液压缸(303)的输出端相连;升降顶升液压缸(6)固定于送料车架(401)的上表面。4.根据权利要求1所述的货运无人机舱内货物运输装置,其特征在于:所述物料托盘(5)靠近纵向导轨(2)的一端还设有升降式挡板(9);所述物料托盘(5)上设有用于安装升降式挡板(9)的安装槽(501),安装槽(501)内底面设有电磁铁(502),安装槽(501)两对称侧壁上设有t型槽(503);所述升降式挡板(9)两侧设有与t型槽(503)相对应的t型块(901),升降式挡板(9)底面设有磁铁(902),磁铁(902)和电磁铁(502)之间设有复位弹簧(10)。
技术总结
本实用新型公开了一种货运无人机舱内货物运输装置,包括设置在无人机货仓底面的横向导轨(1),且横向导轨(1)与无人机货仓仓门相对应,横向导轨(1)侧面设有多条平行分布的纵向导轨(2),纵向导轨(2)的高度高于横向导轨(1)的高度;所述横向导轨(1)上设有接料小车(3),接料小车(3)上方设有与纵向导轨(2)相对应的送料小车(4),送料小车(4)上方设有物料托盘(5),送料小车(4)和物料托盘(5)之间设有升降顶升液压缸(6);所述纵向导轨(2)的两侧设有货物支撑架(7),两个纵向导轨(2)之间设有与物料托盘(5)相配合的通行槽(8)。本实用新型具有货物装卸方便的特点。物装卸方便的特点。物装卸方便的特点。
技术研发人员:詹雷 杨桢 刘泽峰 龚晶 王海明
受保护的技术使用者:航天时代飞鹏有限公司
技术研发日:2021.06.07
技术公布日:2022/1/7